「ないものは自分でつくる」人に寄り添った安全技術
1990年代の半ば、安全技術に関わる研究所のメンバーは、21世紀の自動車の安全を見据えた時、もっと現実(リアルワールド)に即した衝突安全を考えるべきという方針を打ち出していた。
早くから交通事故の実態を調査していたメンバーは、「クルマ同士」あるいは「クルマと歩行者」の衝突事故が、死亡事故に占める割合が多いことに着目していた。クルマ単独の衝突安全ボディーの進化の方向性にはおおよその見通しが立っている。ならば、リアルワールドで多くの死亡事故に結び付いているその2つの事象へ、自主的に目を向け対処すべきであると。
日本国内の交通事故は、歩行者事故が大きな割合を占めているにも関わらず、クルマ側の対策は本格的に行われていなかった。ホンダはこの問題に正面から取り組む必要があると考え、1988年に歩行者保護研究を本格的にスタートした。事故実態の綿密な分析から、歩行者のどの部位がクルマのどの部分に当たっているかを調べたところ、死亡事故に至る傷害部位は頭顔部が63%と圧倒的に高く、加害部位はボンネット・フェンダー・ダッシュボードアッパーが全体の80%を占めることが分かった。このことから、車体前部による頭部保護を最優先することとしたが、そのためには、頭部が車体に衝突する位置および速度を明らかにする必要があった。
当時は歩行者ダミーなどなく、乗員ダミーの改良版でテストを行っていた。その確かさを確かめるべく、傷害メカニズムの解析に取り組んだところ、それまでのデータとは乖離があることが判明した。
「歩行者保護は、ダミー人形をつくるところから始めなければならない」
「規制を基準とせず」「ないものは自分でつくる」。それは、ホンダの基本的な考え方である。より事故実態に近いテストを行うために歩行者ダミーの開発を決断。最初に取り組んだことは、衝突時の挙動を人体に近付けることである。公表されている人体データを用いてシミュレーションダミーを開発。楕円の剛体を関節モデルでつなぎ合わせたシンプルなモデルであったが、各部関節特性データを人体に近くしていくことで人体挙動を高精度に再現することに成功。その知見を実体ダミーへ反映していった。さらに、脚部への変形部材の適用、脊椎ジョイントの追加、関節特性のさらなる見直しを重ね、ついに世界初の歩行者ダミーPOLARを1998年に開発した。
そして、POLARを用いた衝突実験を行い、歩行者事故の傷害を軽減する車体構造を開発。「歩行者傷害軽減ボディ」として、1998年9月に発売したHR-Vに適用し、順次適用を拡大していった。歩行者ダミーについても、挙動評価だけでなく傷害値の計測性能を高めるため、構造をより人間の特性に近付けるべく進化を重ね、データ測定部位を拡大。それまではダミーに内蔵したセンサーと外部のデータ収集装置を有線で接続しており、ダミーの挙動にも影響があったため、データ収集装置も内蔵したPOLARⅡを2000年に開発した。
また、ミニバンやSUVなどバンパー高の高いクルマが増えてきたことを受け、最新の歩行者事故調査解析から、多くなっていた腰部や大腿部の傷害に対応すべく、それらの箇所をフレキシブル構造部品に変更。骨折の生体忠実度を向上させ、2008年に歩行者ダミーPOLARⅢを発表。クルマの歩行者保護性能の進化に大きく貢献した。
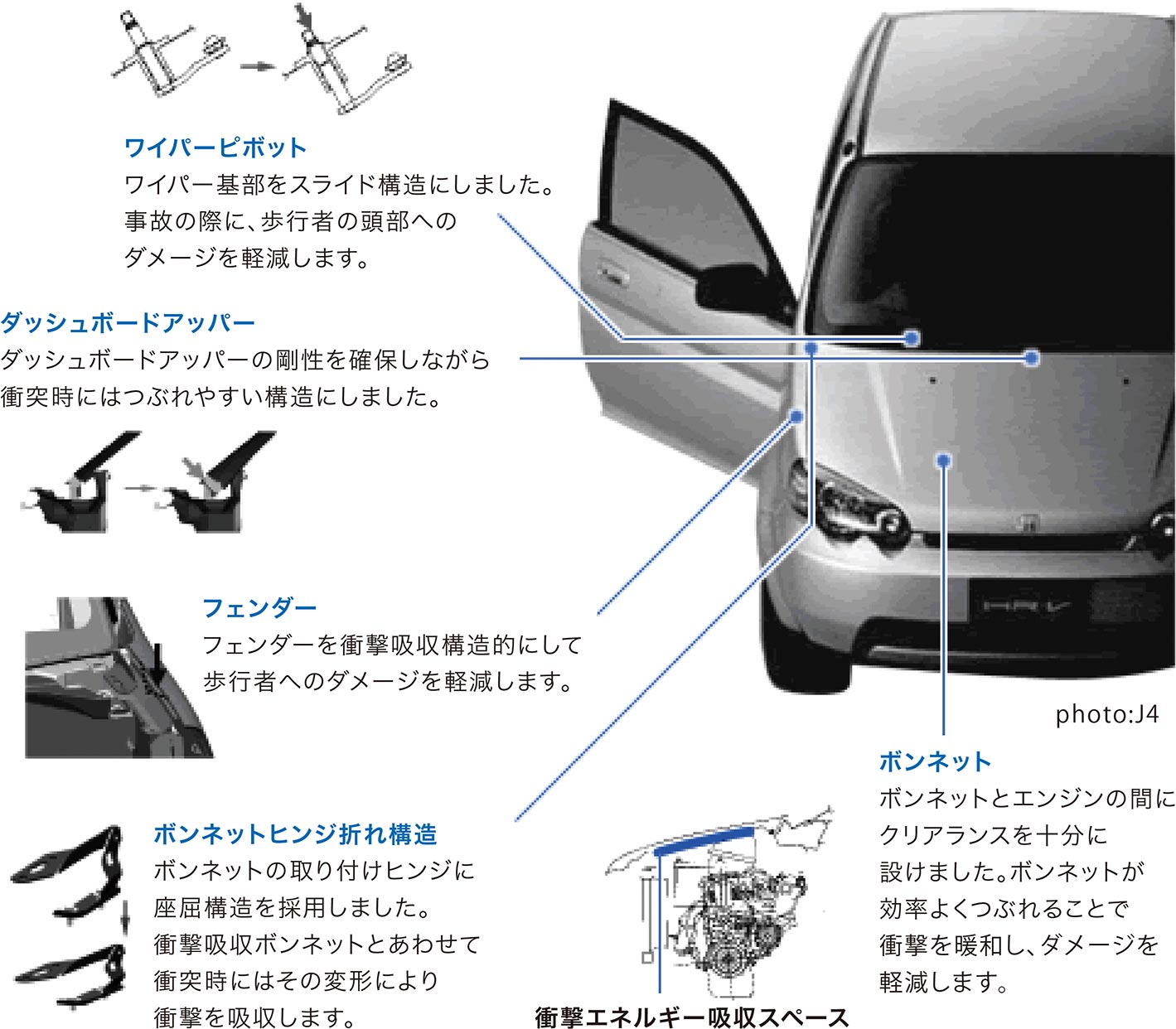
歩行者ダミーPOLARによる衝突実験によって開発された
「歩行者傷害軽減ボディ」構成図

第3世代歩行者ダミーPOLARⅢ

歩行者ダミーによる衝突実験
一方で、ボディーの衝突安全性能についてもホンダは独自の技術を生み出していた。1980年代後半から1990年代前半にかけて、いわゆる「第2次交通戦争」を経験した日本は、前面衝突の法規を1994年から適用し、翌1995年には、法規より厳しい条件で安全性を評価するJ-NCAPをスタート。しばらくして、欧州も1998年から統一規格を導入したが、日米欧でテスト条件が異なることがクルマの開発と評価に影響を与えていた。
米国と日本が採用するリジットバリア(非変形)の前面フルラップ衝突は、シートベルトやエアバッグなどの評価に適していた。車体前部をあえて圧壊させ、衝突エネルギーを吸収することで乗員に加わる衝撃を抑制する必要があったため、相対的に車体剛性が低い方が有利となる。一方で欧州は、デフォーマブルバリア(変形可能)の前面オフセット衝突で評価し、乗員の生存空間確保を主眼としていた。オフセットすなわち片側に衝突し入力荷重が大きいため、開発では車体を固める傾向となった。つまり、車体を柔らかくする方向と固める方向、2つのスタンダードが存在することとなった。
ホンダは、リアルワールドにおいて乗員を救うためにはその両方の特性を高次元で成立すべきだと考えていた。そこで、「衝突時の乗員減速度制御に関する新概念」を数学的に検証し、具体的な技術の実現に取り組んだ。その新概念は、衝突時のG(加速度)を、大きく3段階でコントロールすることを特徴としていた。初期、乗員にまだ大きなGがかからない時点では、車体側で高い減速度を発生させエネルギーを吸収する。続いて乗員にGがかかり始める段階では車体の減速度を低く抑え、乗員Gの上昇を防ぐ。最後に一定の減速度を発生させ、キャビンの変形を効率的に防ぐ。これにより、乗員の傷害値を低減しながら、キャビンを守り生存空間を確保することが可能となった。ホンダはこの考え方を導入した衝突安全ボディと新・エアバッグシステムや歩行者傷害軽減ボディと合わせて「ホンダGコントロール技術」と呼んだ。1998年から車体が大きくなった軽自動車を皮切りに、優れた衝突安全ボディを実現していった。
安全に関して、どこで始まり、どこで終わるという概念はない。常にリアルワールドを把握し続けるホンダは、車高の高いSUVやミニバンの急増により、小型車が大きなダメージを負うケースが増えていることに注目した。いつまでも固定バリアにとどまっているわけにはいかない。リアルワールドに近付けるには、サイズ・重量の異なる「クルマ同士」の衝突を前提とした、いわゆるコンパティビリティ(共存性*1)の技術開発が必要だと考えた。
ホンダは、1980年代の半ばから一般財団法人日本自動車研究所(JARI)や海外の施設でクルマ同士の衝突テストを行っていたが、主にエアバッグの精度検証などを目的としたものであった。新たにコンパティビリティの概念でクルマ同士の衝突テストを開始したが、当時、国内唯一の実験施設であったJARIの利便性が、ホンダにとってはもどかしいものであった。試験場の混み具合によっては数カ月先までテストが行えないこともあり、また、JARIがある筑波はテスト結果を迅速に反映するにはホンダの開発拠点から距離的にも遠過ぎるという問題もあった。必要とあれば「今日やれ、今やれ」がホンダの伝統である。さらには、遠方で行うと限られた開発者しか実際の衝突を見ることができない。それは、現場・現物・現実を重んじるホンダの考えにそぐわないといえた。
「ホンダのクルマを開発するすべての技術者に、リアルワールドで起こっている衝突の現実を見てもらいたい」
自前実験施設の必要性を上層部に訴え、承諾を得たことで急きょ建設を始めることとなった。そして2000年3月、世界初の屋内型全方位衝突実験施設、通称67号棟が完成した。東京ドームの面積に匹敵する4万平方メートルの広大な衝突実験スペースに、屋根を支える柱は1本もなかった。それは、柱によって実験に制約を与えず、さまざまな衝突を再現しやすいようにするためだった。屋内型としたのは、天候によって、計画していた衝突実験が左右されず、夏も冬も快適に実験できる環境を整えるためだ。「人間尊重」のホンダフィロソフィーに基づいてのことだった。

リアルワールドに即した衝突実験を目指した、屋内型全方位衝突実験施設
 リアルワールドに即した衝突実験を目指した
リアルワールドに即した衝突実験を目指した屋内型全方位衝突実験施設
67号棟が完成し、大きさの違うクルマ同士の衝突実験を行うなどにより研究を進めた結果、大型車と小型車の衝撃吸収構造がすれ違っていることがわかった。そこで、双方のクルマの衝撃吸収構造がうまくかみ合うように部材を配置することで相手車両の衝撃吸収部材とのすれ違いを防止、衝撃を分散化し、自己保護性の向上と相手車両への攻撃性の低減を両立するコンパティビリティ対応ボディを2003年9月発売の軽自動車ライフに初採用した。リアルな衝突実験を徹底して行うことで開発したコンパティビリティ対応ボディは、67号棟の成果であり、リアルワールドの安全に対するホンダの解答の1つだった。
- :車両重量や構造が異なる車両同士の衝突に対応すること

大型車対小型車の衝突実験
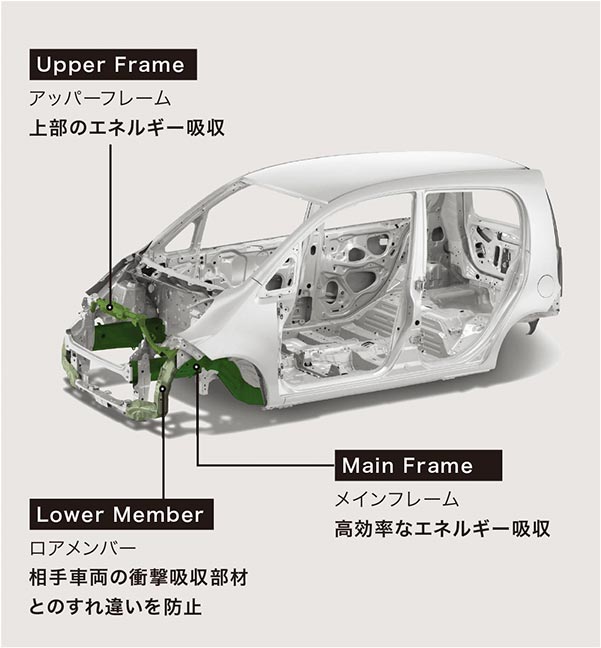
ライフに採用されたコンパティビリティ対応ボディ
「事故に遭わない社会」の実現に向けて
ホンダが車間距離制御を含むレーダーの研究に着手したのは、50年以上も前の1971年のことだった。その研究の中で、警報を音ではなく、アクセルペダルの重さで伝える方法や、緊急時にブレーキを作動させるレーダーブレーキシステム、アダプティブクルーズコントロール「Adaptive Cruise Control(ACC)」の原形が芽生えていった。そして、20年を超える第1期先進安全自動車「Advanced Safety Vehicle(以下、ASV)」の成果を1995年のASVの発表で示し、交通死傷事故の約30%を占める追突事故の回避支援と被害軽減を目指した追突軽減ブレーキ「Collision Mitigation brake System(以下、CMS)」の実用化の研究に着手。1996年からのASV-2の研究を経て、2003年、世界初の衝突軽減ブレーキ(CMS)を開発し、CMSと連動して体感警報と乗員拘束を行うE-プリテンショナーシートベルトと組み合わせてインスパイアに搭載し発売した。
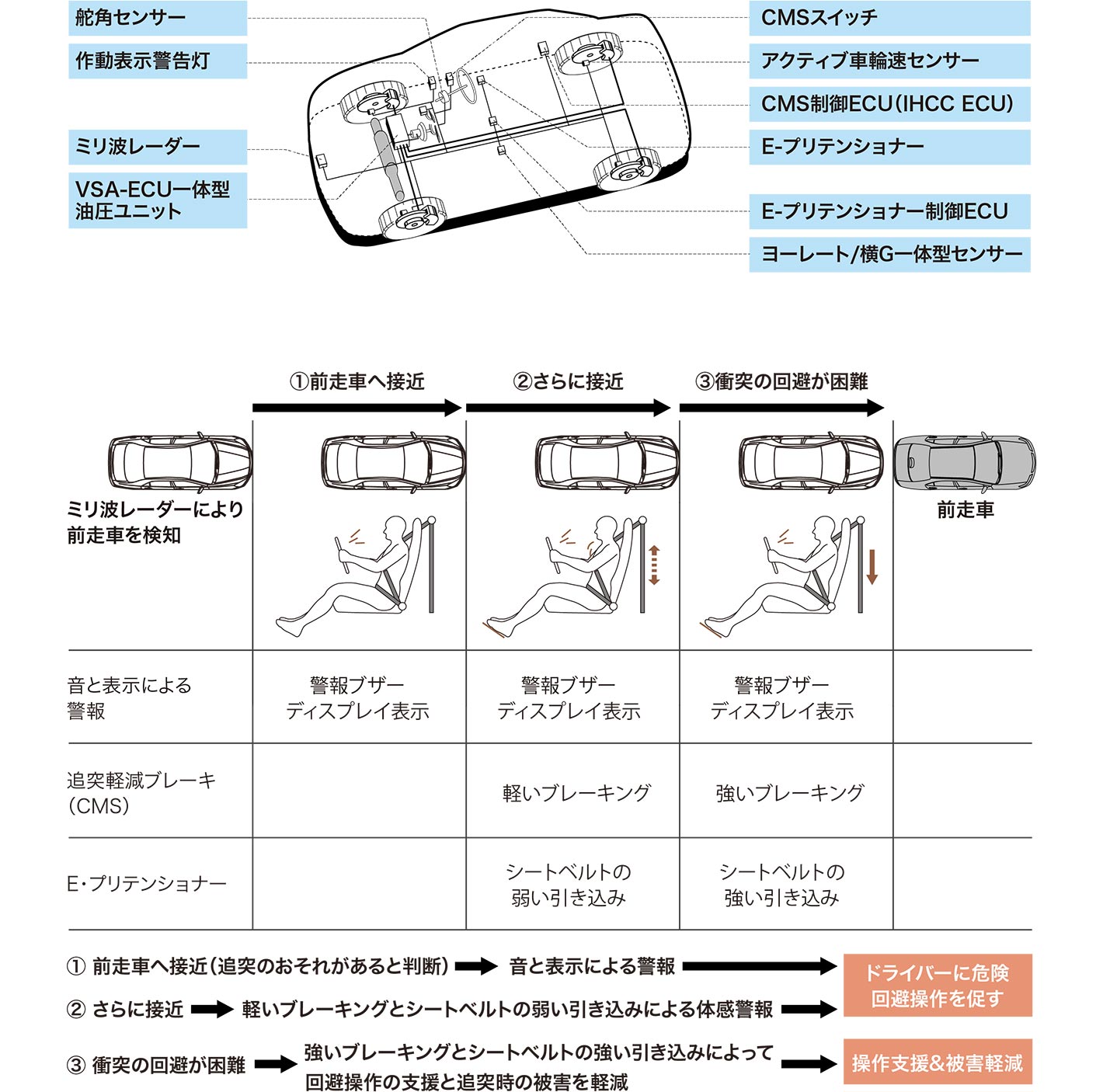
CMS+E-プリテンショナーシートベルトのシステム構成図と作動イメージ
 運転支援技術Honda SENSING
運転支援技術Honda SENSING
当初は、研究所内でも技術として本当に価値があるか判断しかねるという雰囲気であったが、インスパイア発売と同時に、自動車専門誌だけでなく、経済誌や科学専門誌からも取材があり、他社の追随も明らかになるにつれ、社内でも価値があるとの認識が追いつかないほどの先進技術であることが明確となった。
これにより、追突事故に対する対応を示すことができたが、一方で、同程度に割合が高い交差点事故や、重傷率の高い正面衝突に対しては現実的な回答を示せていなかった。
より多くの事故において回避を支援することを目指し、ホンダはその後も技術開発に挑み続けた。2004年には、夜間の見えにくい前方歩行者の発見を促す世界初のインテリジェント・ナイトビジョンシステムを開発、ASV-2で着手していた、車線維持・車線逸脱警報システム(Honda Lane Keep Assistance System)や、渋滞追従機能付アダプティブクルーズコントロールなどの進化にも挑み続けたのである。
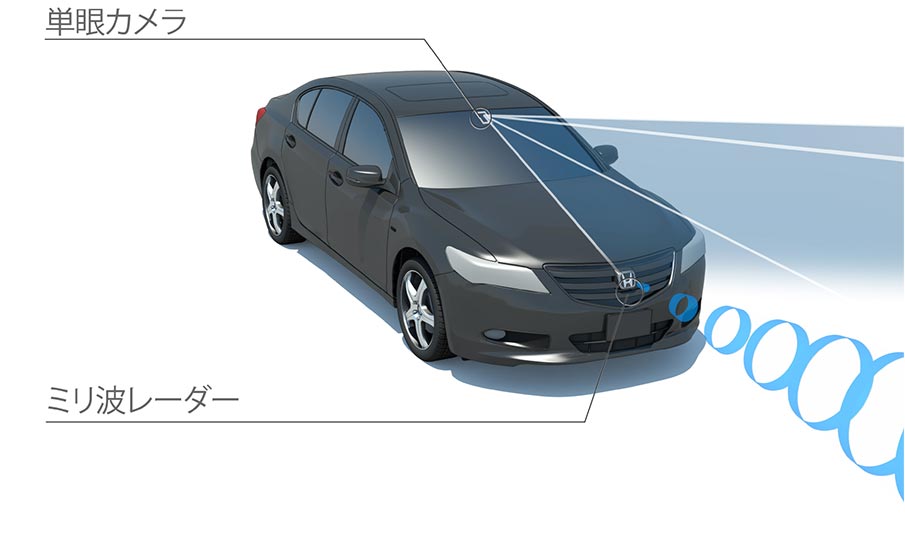
そして、2014年10月、ミリ波レーダーと単眼カメラによってクルマ前方の状況認識からブレーキとステアリングの制御技術を協調させることで、安心・快適な運転や事故回避を支援する先進安全運転支援技術Honda SENSINGを発表。国内では、2015年発売のオデッセイから順次適用を拡大していった。
その後も、Honda SENSINGを進化させながら、将来の自動運転を見据え、2021年に自動運転レベル3を実現したHonda SENSING Eliteを搭載するレジェンドを発売。トラフィックジャムパイロット(渋滞運転機能)により、渋滞時、ハンズオフで走行しながら、ナビ画面でのテレビやDVDの視聴、目的地の検索などのナビ操作をすることが可能となり、渋滞時の疲労やストレスを軽減させるシステム*2を実用化した。
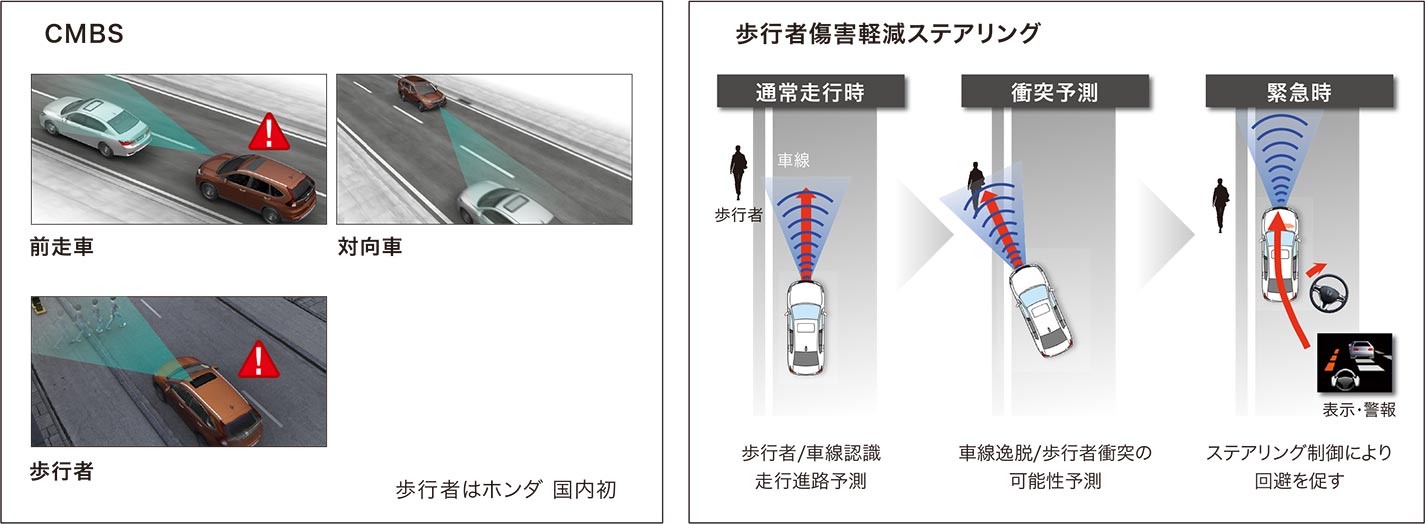
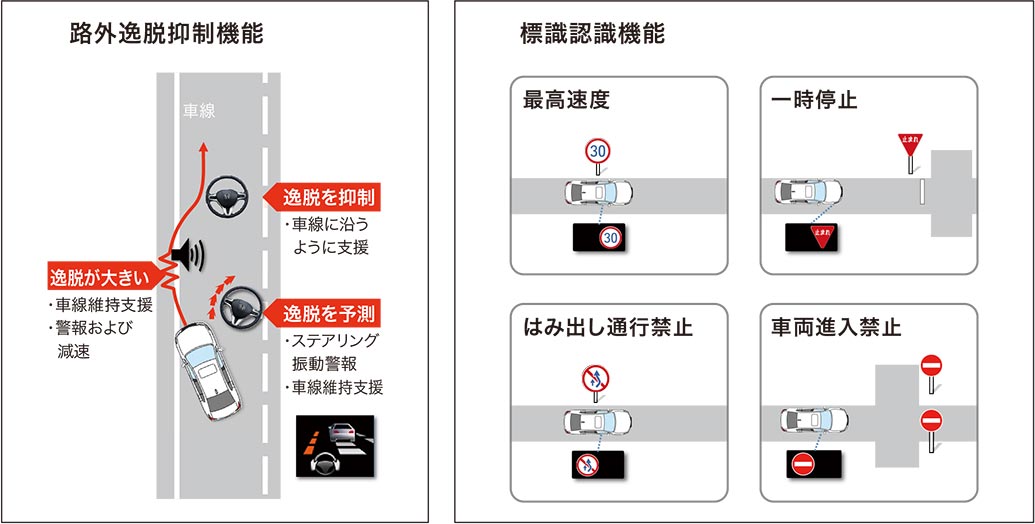
Honda SENSINGの主な機能、CMBS・歩行者傷害軽減ステアリング・路外逸脱抑制機能・標識認識機能
同年11月、ホンダは、すべての交通参加者が交通事故リスクから解放され、安心して自由に移動できる社会の実現に向けて、開発中の先進安全技術を世界に向けて公開した。一人ひとりの能⼒や状態に合わせ、運転ミスやリスクを減らし安全・安心な運転へと誘導できる世界初の人工知能(AI)活用による知能化運転支援技術、すべての交通参加者である人とモビリティーが通信でつながることで、事故が起きる手前でリスクの予兆・回避をサポートする安全・安心ネットワーク技術により、2050年に全世界でホンダの⼆輪車・四輪車が関与する「交通事故死者ゼロ」の実現を目指すことを発表した。
「事故に遭わない社会」の実現をホンダは目指している。車両周辺の死角をカバーし、交通事故の回避やドライバーの運転負荷の軽減をサポートする全方位安全運転支援システムHonda SENSING 360を、2030年に、⼆輪車検知機能を適用したうえで全世界の四輪車全機種へ展開を目指すなど、安全・安心を目的とした先進運転支援システムであるADAS(Advanced Driver Assistance System)機能の進化に挑み続ける。
さらには、⼆輪安全技術の普及拡大や、ホンダが1970年から取り組み続けている安全運転普及活動の強化、さらにはオンラインで交通安全教育を学べる仕組み「Honda Safety EdTech」の展開なども進め、2030年に全世界で ホンダの⼆輪車・四輪車が関与する交通事故死者を半減させ、その先の将来安全技術の早期確⽴により、2050年交通事故死者ゼロという高い目標の達成に挑んでいる。ホンダの安全の根本思想となる「Safety for Everyone」の具現化を目指し、たゆまぬ努力を続けていく。
- :条件付自動運転車(限定領域)。日本政府が定める自動運転の定義(SAEに準拠)。一定の条件下で、システムが周辺の交通状況を監視するとともに運転操作を代行。システムが使用可能な条件から外れる場合は、警報を発して直ちにドライバーに運転交代をすることが求められる。
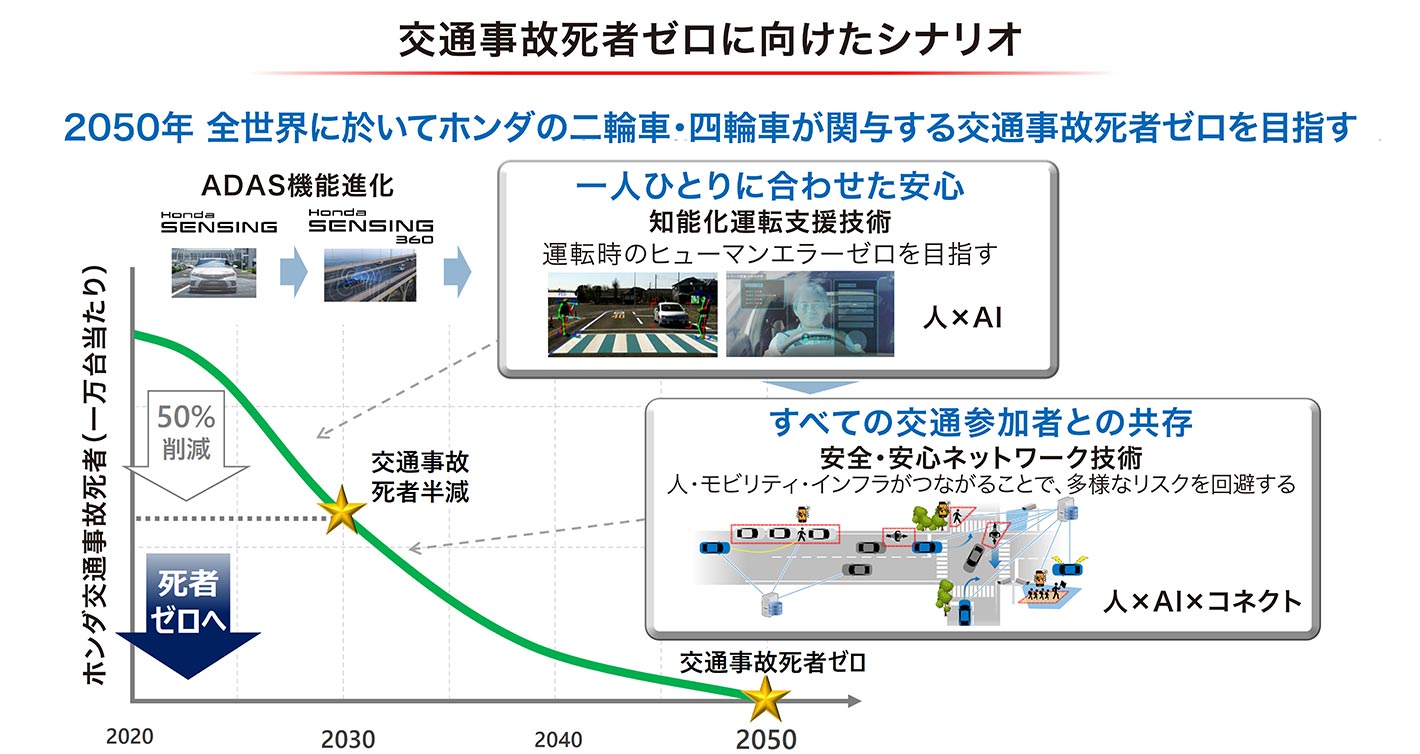
交通事故死者ゼロに向けたシナリオ
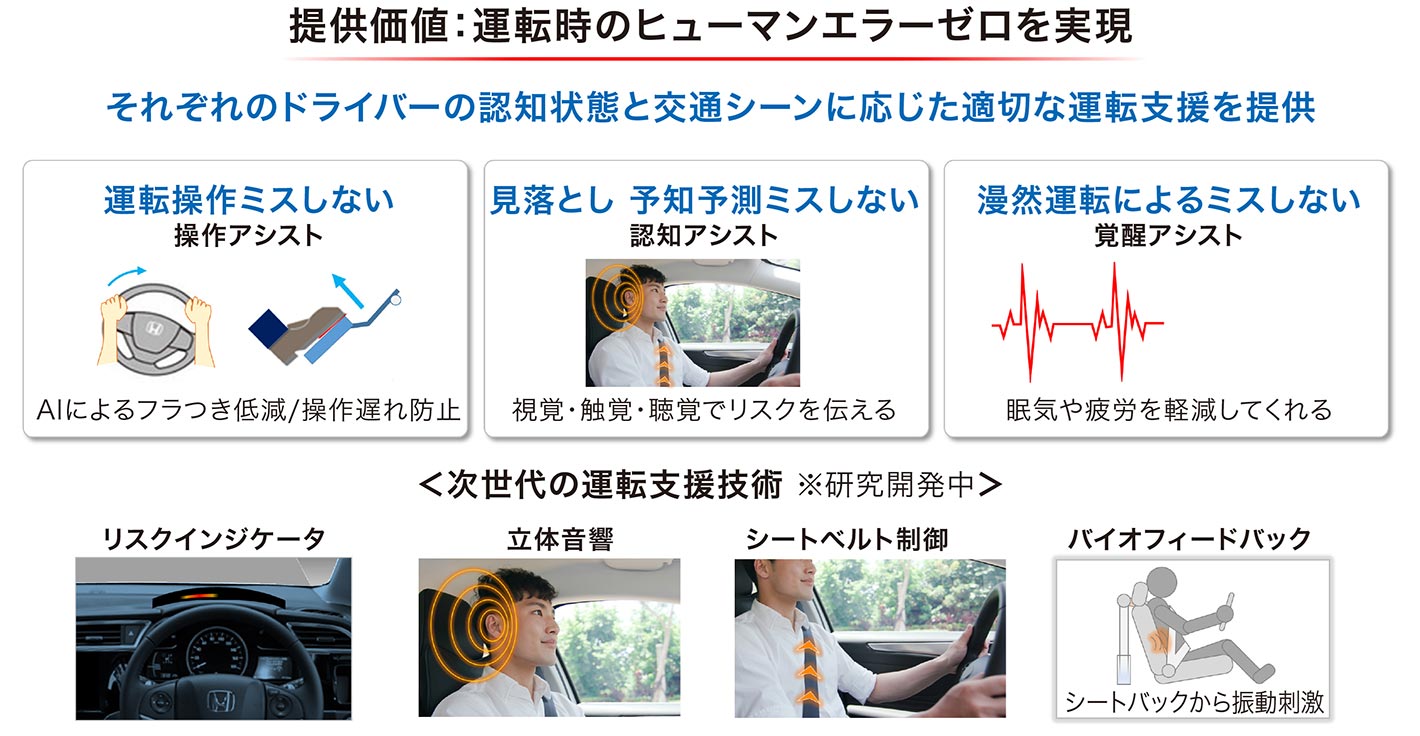
知能化運転支援技術
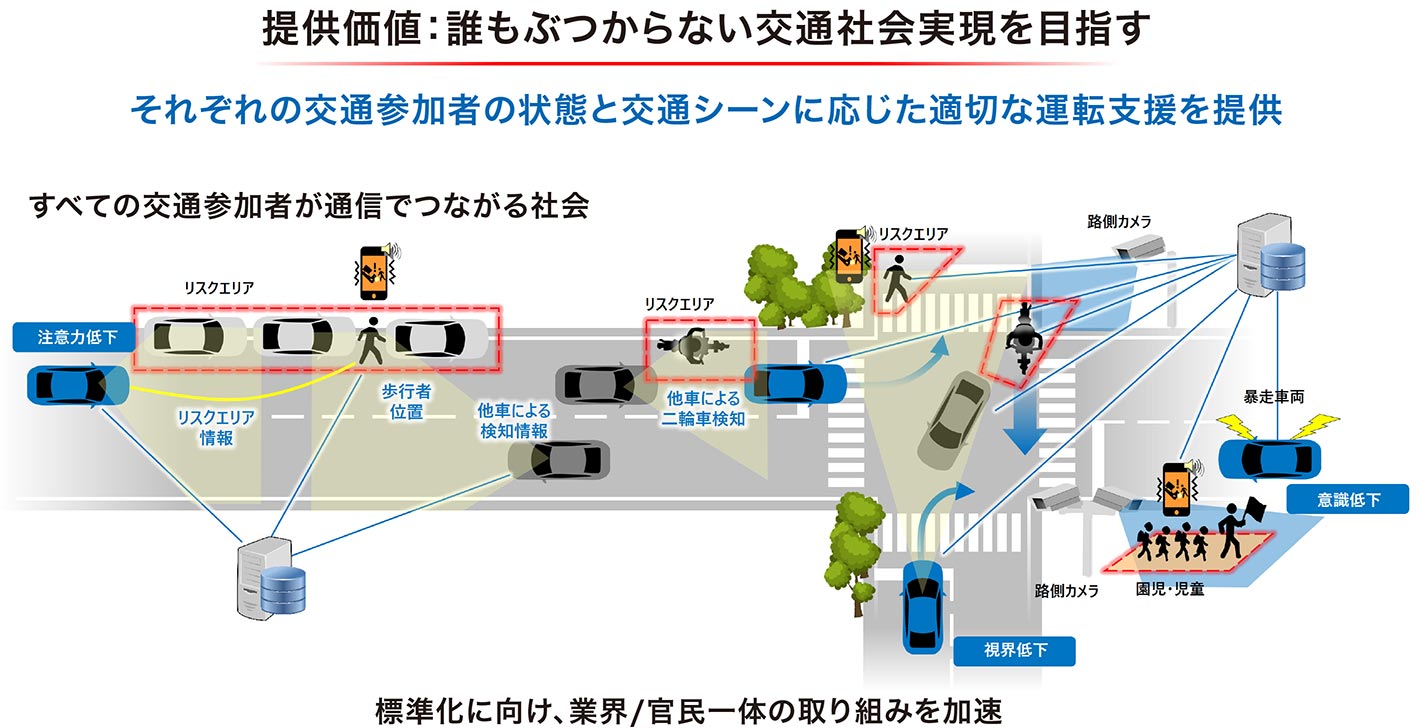
安全・安心ネットワーク技術




