
Hondaは先行開発を行なう技術者を若手中心に集めてチームを結成し、4モーターSH-AWD EVを開発。2015年6月にアメリカ・コロラド州で開催されたパイクスピーク・インターナショナル・ヒルクライム(以下PPIHC)に参加した。4モーターによるトルクベクタリングの効果を検証するためである。
トルクベクタリングは、駆動力に左右差を設けることによって重心点まわりにヨーモーメントを発生させ、旋回支援を行なったり、姿勢を安定させたりする技術だ。この技術は1996年のプレリュードに適用したATTS(アクティブ・トルク・トランスファー・システム)により実用化している。ATTSはフロント左右輪間の駆動力配分を行ない、曲がる力を高めるシステムだ。
以来、Hondaはその時代ごとにトルクベクタリングの技術を進化させ、適用してきた。2004年には、前後輪と後輪左右の駆動力を機械的構造で自在にコントロールする世界初のシステム、SH-AWD(Super Handling – All Wheel Drive)をレジェンドに適用した。
2014年のレジェンドに適用した3モーターハイブリッド SPORT HYBRID SH-AWDは、フロントに搭載するエンジン+モーターと、リアに搭載するツインモーターユニット(TMU)により、高度なトルクベクタリングを可能にしている。さらに、2016年の2代目NSXに適用したSPORT HYBRID SH-AWDでは、ミッドに搭載するエンジン+モーターで後輪を駆動し、フロントにTMUを搭載。モーターを制御することによる駆動力差により、幅広いシーンで自在に曲がり、軽さを感じる走りができるよう仕立てた。
これらの延長線上にあるのが4モーターSH-AWD EVである。レジェンド、NSXともフロントもしくはリアをエンジン主体とする動力源で駆動するが、4モーターSH-AWD EVはフロント、リアともに高応答かつ制御性の高いモーターで駆動する。4モーターとすることで究極のトルクベクタリングを目指し、効果を確認するのが、この車両の狙いだった。
開発に着手した2012年頃は、現在ほど世の中に電気自動車(EV)は浸透していなかった。その頃、社内の研究開発施設には急速充電設備は、まだ少なかった。Hondaが「2030年をめどに商品ラインアップにおける販売数の3分の2を、プラグインハイブリッドとハイブリッド、およびFCV・バッテリーEVなどのゼロエミッションビークルに置き換えることを目指す」と発表したのは2016年2月のことである(2023年4月には、「2030年までにグローバルでEVの年間生産200万台超を計画」とする発表を行なった)。
Electric SH-AWD with Precision All-Wheel Steer (先行開発車両)






いずれトルクベクタリングとEVがまじわる日が来る。そう信じたうえでの開発着手だった。トルクベクタリングを進化させるうえでも、電気との相性はいいと考えられた。エンジンで駆動力を制御する場合はまず、シリンダーに送り込む空気量を制御する必要がある。ECUが指令を出してからスロットルが動くと、相応のイナーシャを持った空気が動き、吸気行程でシリンダーに入って、燃料を混ざり合いながら圧縮され、スパークプラグで点火。膨張行程でシリンダー内の圧力がクランクシャフトの回転運動に変換され、ようやくトルクを発生する。
一方、モーターの場合はECUが指令を出すと、1000分の1秒単位の応答速度で、指令どおりのトルクを出す。エンジンの場合、応答性を上げようにも物理的に限界があり、シミュレーションどおりにはいかない。ところがモーターの場合は駆動側も制動側もシミュレーションどおりに動かすことができる。各輪をモーターにした4モーターの場合は、4輪とも指示どおり自由自在に動くため、トルクベクタリングの究極の姿が実現できると考えられた。
パイクスピーク・インターナショナル・ヒルクライムコース(PPIHC) コース図

ロッキー山脈のパイクスピークで行なわれるPPIHCは、1916年に初めて開催された。標高2862mの地点をスタートし、約20km先にある標高4301m地点まで156のコーナーをクリアしながら駆け上がり、所要時間を競う。スタート地点は晴れているのに、森林限界を超えたゴール地点では雪が降ることもある。ゴール地点に近づくほど空気密度は低下するため、エンジンは出力が4割程度低下する。
EVは空気密度が低下しても出力は低下しない。ただし、コース走行時の温度変化は厳しいし、大きな電流を連続的に流すことになるためバッテリーの温度マネジメントが重要になる。トルクベクタリングの効果以外にも、有用なデータが収集できると考えた。
Electric SH-AWD with Precision All-Wheel Steer (CR-Zベース レース専用車両)

PPIHCにエントリーする車両のベースがCR-Zになったのは、横転時などの安全性を考えて後席にバッテリーを搭載するスペースがあること」、かつ、「スポーツカーが望ましい」とする条件に合致したからである。モーターを4基搭載すれば、大型のモーターを新規に開発するのに比べて合理的なコストを抑えられるし、必然的にハイパワーになり、トルクベクタリングもできる。一石二鳥ならぬ一石三鳥のアプローチだった。
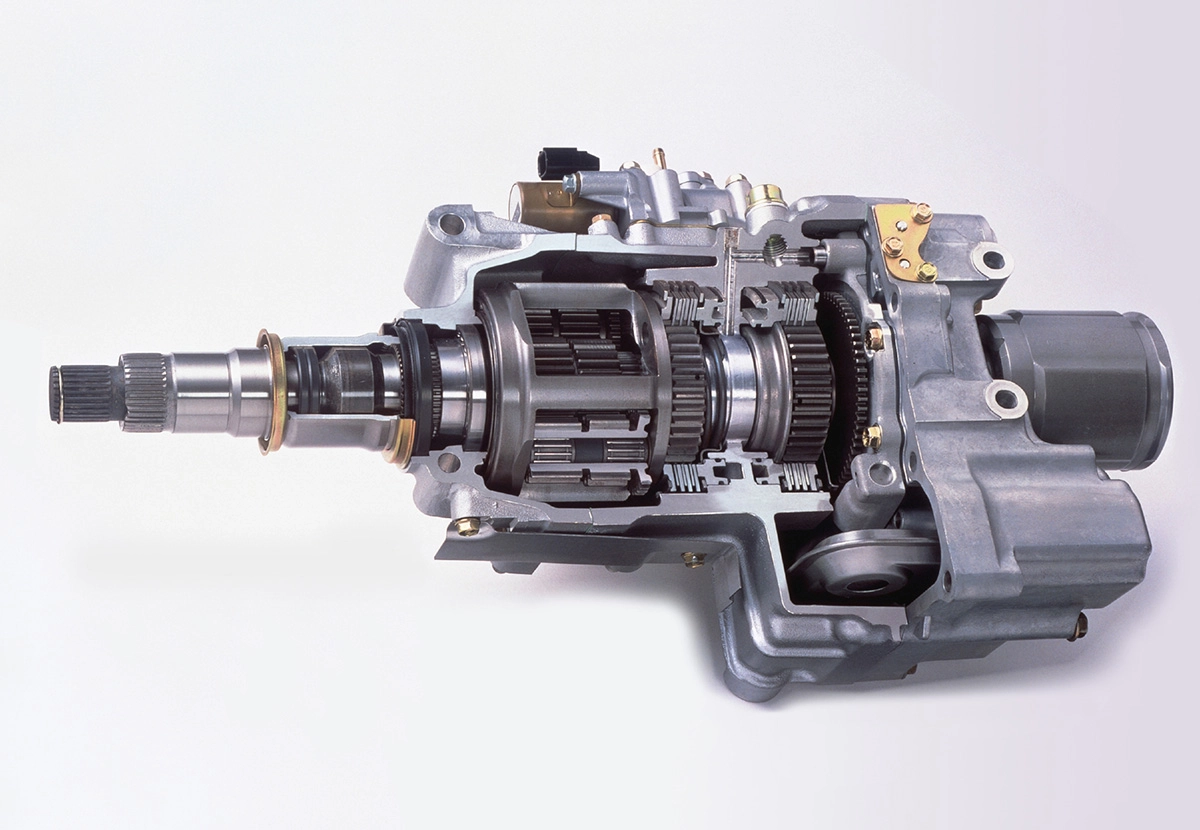
当時まだ2代目NSXは市場に導入されておらず、リアにツインモーターユニット(TMU)を搭載していたレジェンドのシステムをフロントにも搭載した格好である。ツインモーターユニット(TMU)は2基のモーターとプラネタリー減速機構、ワンウェイクラッチ、ブレーキで構成する。PPIHC参加車両を仕立てるにあたっては量産部品をそのまま使うコンセプトとしたため、ツインモーターユニット(TMU)の基本構造は踏襲。効率化を図るためクラッチは直結にして使った。
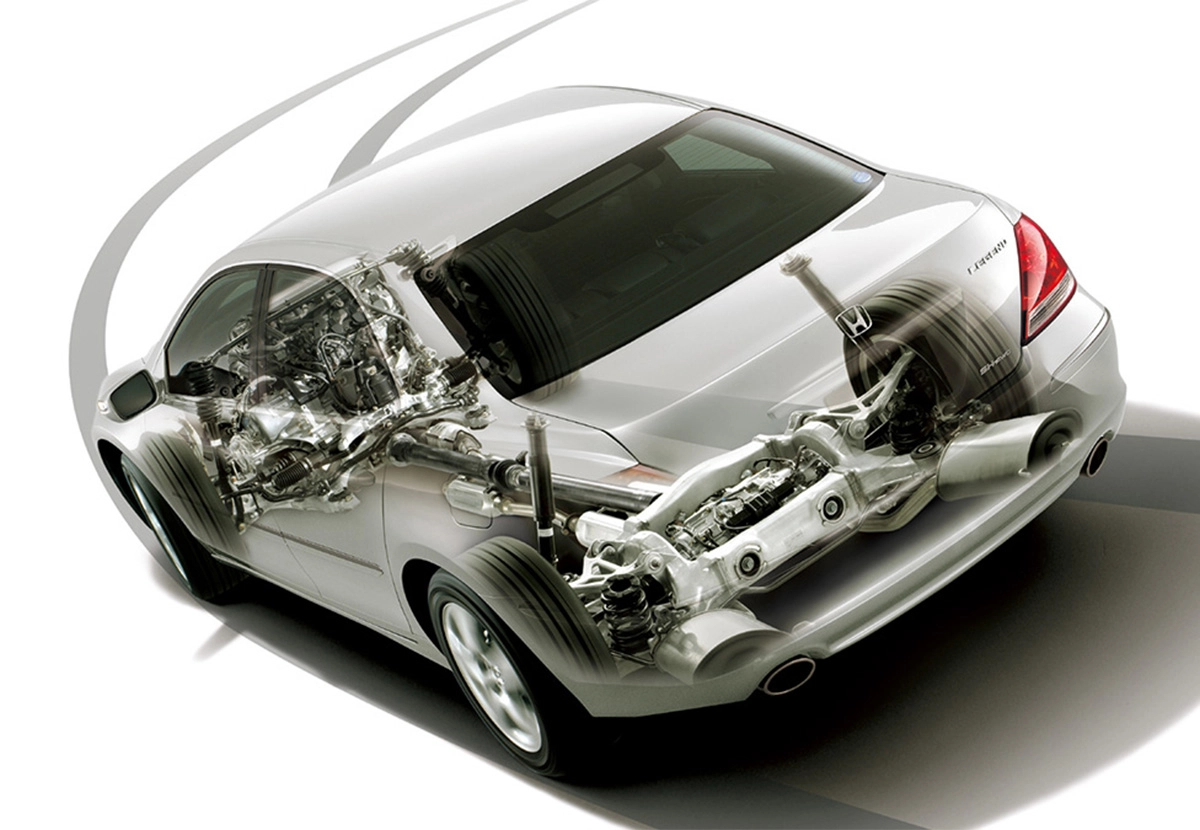
さらに、北米で販売するアキュラRLXのFF仕様に搭載していたリアトーコントロールシステムのPrecision All-Wheel Steer(P-AWS)を組み合わせた。P-AWSはリアサスペンションのトーコントロールアームを電子伸縮アクチュエーターに置き換えることにより、後輪左右の独立操舵を実現するシステムである。リチウムイオンバッテリーはシートの背後に搭載した。
PPIHCにはさまざまなクラスが設けられている。2015年の大会はモディファイドEVクラス(無制限EV車)出場車が総合優勝を果たし、タイムは9分7秒だった。Electric SH-AWD with Precision All-Wheel Steerの車名が与えられたHondaのPPIHC参加車両は、速さを追求するのが目的ではなく、あくまで、過酷な環境でトルクベクタリングの効果を検証することにある。そのためパワーと順位は追わず、エキシビションクラス(量産プロトタイプ)でのエントリーを選択。目標タイムは10分30秒に設定した。
パイクスピーク・インターナショナル・ヒルクライム(PPIHC) 参加クラスと目標

トルクベクタリングは内側輪よりも外側輪に大きなトルクをかけて重心点まわりに内向きのヨーモーメントを発生させ、優れた回頭性を実現するのが制御の基本である。研究の結果、この制御はリアアクスルに対しては有効だが、フロントアクスルに適用した場合はステアリングを引き込む動きが出て、ドライバーに違和感を与えることがあることがわかった。
さらに、フロントアクスルで外側輪に内側輪よりも大きなトルクをかけると、引き込む動きが出た後にいわゆるアンダーステア傾向に転じるケースがあることがわかった。そこで、フロントは外側輪よりも内側輪に大きなトルクをかけて復元モーメントを発生させ、安定方向に振る制御を設定した。一様にこの制御を適用するのではなく、ステアリング舵角やアクセルペダル開度、車速、横G、ヨーレートなどの情報を基に、シチュエーションに応じて切り換えることにした。
PPIHC本番を迎えるまで、開発チームは国内で走行テストを繰り返し、ドライバーの好みに制御を合わせ込んでいった。よく曲がる動きが好みならそのように調整できたし、より安定性が欲しければそのように調整することができた。制御でドライバーの好みの動きに仕立てることができるのが4モーターSH-AWD EVの特徴であり、その特徴を存分に生かした格好である。現地でも精力的に走り込みを行い、タイトコーナーや崖が迫る区間など、シチュエーションごとに解析して最適な制御を見いだし、本番に臨んだ。
SH-AWD制御ツインモーターユニット(TMU)の違い

イベント当日に記録したタイムは10分23秒829だった。事前のシミュレーションより速いタイムが記録できたことよりも、4輪のモーターを独立して制御するトルクベクタリングにより、ドライバーが違和感なく自然な感覚で走ることができたのが収穫だった。
初挑戦となった2015年のPPIHCでは、メインのテーマに据えたトルクベクタリングに関し、シミュレーションどおりの効果が得られることを確認。シンプルな構成で思いどおりに動くクルマを実現できる4モーターEVの将来性の高さを改めて認識した。
レース現場写真












