AWDの高い運動性能をベースに、旋回性能と安定性を極限まで高めたい。その思いを実現するため、Hondaは前後輪と後輪左右の駆動力を自在に制御する世界初の四輪駆動力自在制御システム、SH-AWD(Super Handling – All Wheel Drive)を開発、2004年10月7日に発売したレジェンドに適用した。
旋回性能と安定性を向上させるには、駆動力の左右差を用いてヨーモーメントを直接制御すればいいことは理論的に確認できており、この理論はすでに量産車に展開していた。1996年11月8日に発売したプレリュードType Sが搭載したATTS(Active Torque Transfer System)である。ATTSは、従来は左右輪に均等にしか伝えられなかった駆動力を旋回状態に応じて左輪と右輪に異なった量配分するシステムである。
加速しながら旋回(公転)しているときに外側輪に内側輪より大きな駆動力をかけると、重心点まわりにヨーモーメント(自転する動き)が発生する。その結果、旋回を助ける効果が生まれ、旋回性が向上。この考えをFF車に取り入れて実用化したのがプレリュードのATTSだった。
前後に駆動力を配分するAWDを左右の駆動力配分に置き換えてみたら性能範囲が広がるのではないか、との着想から開発はスタートしている。1989年には実用化の目処は立ち、商品開発に移る準備はできていた。四輪に駆動力を配分して路面に伝達するAWDのほうが、大きな効果が期待できて望ましいと考えていた。
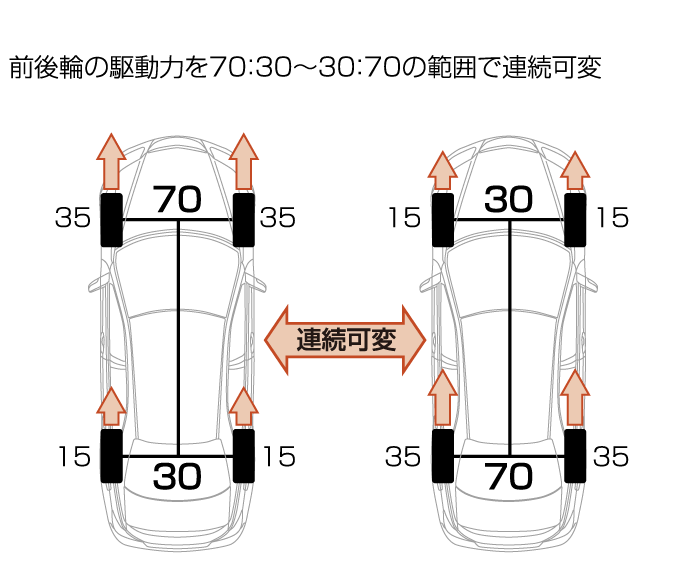
前後駆動力配分イメージ
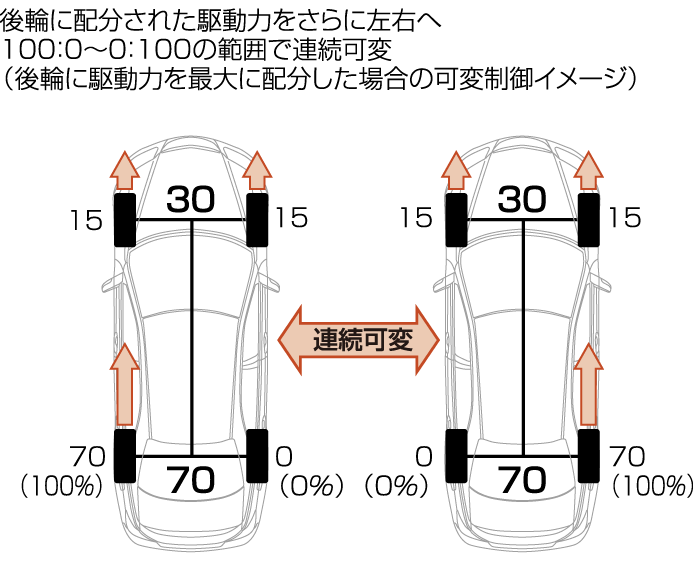
後輪左右駆動力制御イメージ
開発の過程では、エンジンを縦置きに搭載するFF車の2代目レジェンド(1990年〜1996年)を4WDに仕立てるなど、複数の車両で四輪駆動力自在制御システムの研究を進めた。だが、商品化には至らなかった。プレリュードのATTSを挟み、最高出力221kW(300ps)を発生する3.5LV6エンジンを積んだ2004年の4代目レジェンドで、ようやく実用化のチャンスが巡ってきたことになる。
当時すでに、電子制御で駆動力を前後に配分したり、後輪駆動力を左右に配分したりするシステムが考案、または実用化されていた。だが、前後と後輪左右の駆動力を両方とも自在に可変制御できるシステムは存在していなかった。それができると何がいいのか。
接地荷重・駆動伝達能力イメージ
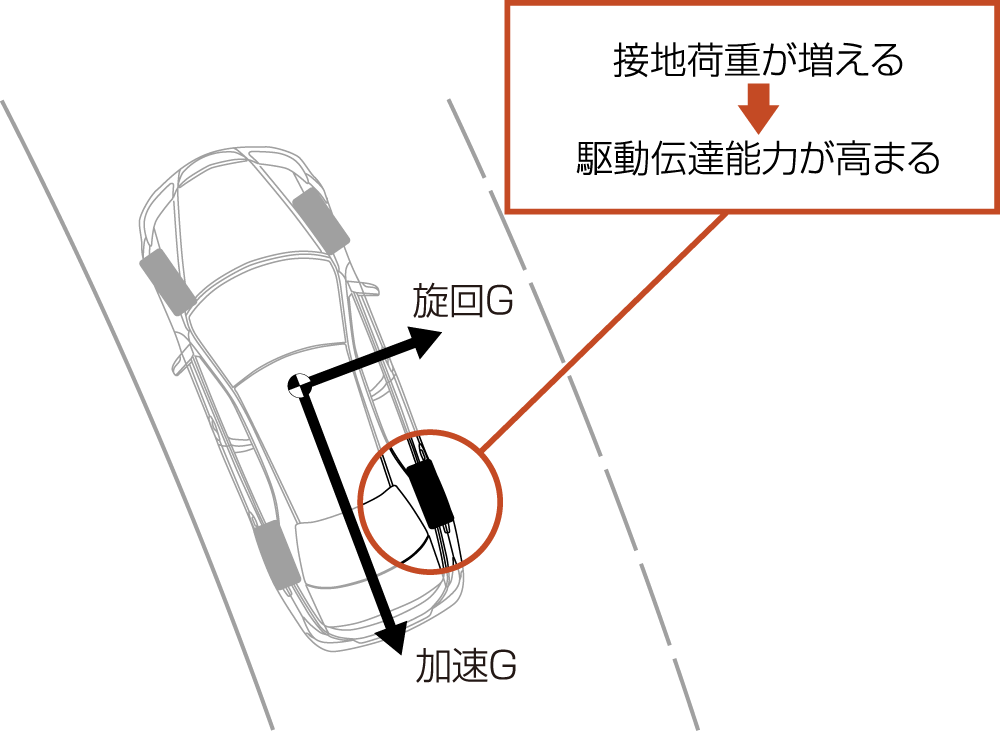
四輪それぞれにかかる接地荷重(タイヤを路面に押し付ける力)は、走行状況によって変化する。荷重移動によって旋回時は外側輪の接地荷重が増大し、加速時は後輪の接地荷重が増え、減速時は前輪の接地荷重が増える。一方、タイヤが発生できる力、つまり路面への伝達能力(摩擦円)は接地荷重が増えるほど高く(摩擦円は大きく)なる。
例えば、左旋回加速時は右側後輪の伝達能力が高くなる。その、伝達能力が高くなった右側後輪に多くの駆動力を与えると、旋回内側方向のヨーモーメントが発生。車両を内側へ向けようとする力が働く。そのため、転舵を受け持つ前輪の負担が軽くなり、いわゆるアンダーステアが抑制されて旋回性能が向上。見方を変えれば、ドライバーが狙ったラインをトレースしやすくなる。
SH-AWD作動イメージ
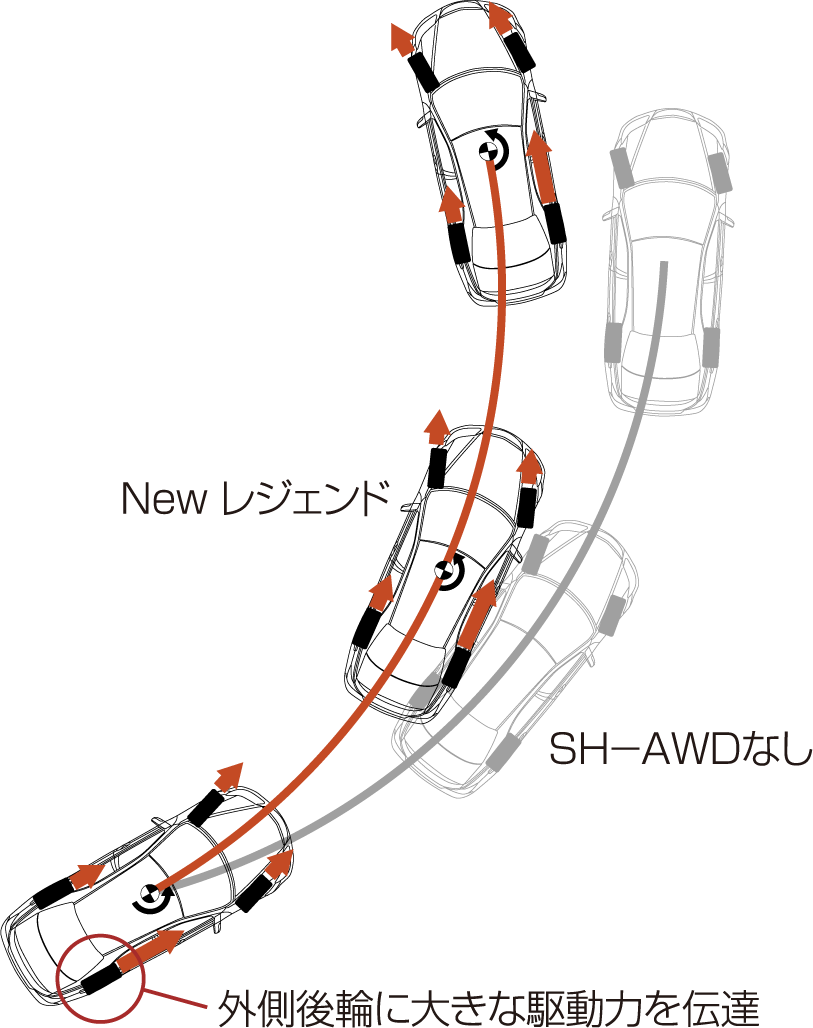
前後だけでなく後輪左右の駆動力も自在に配分できると、四輪それぞれの接地荷重に応じた適切な駆動力を与えることができるため、各輪の伝達能力を使い切ることができる。その結果、旋回可能な限界加速度が向上し、旋回性能が大幅に向上する。このことは、SH-AWD搭載車と前後駆動力を等配分する四輪駆動車との比較試験で確認できた。
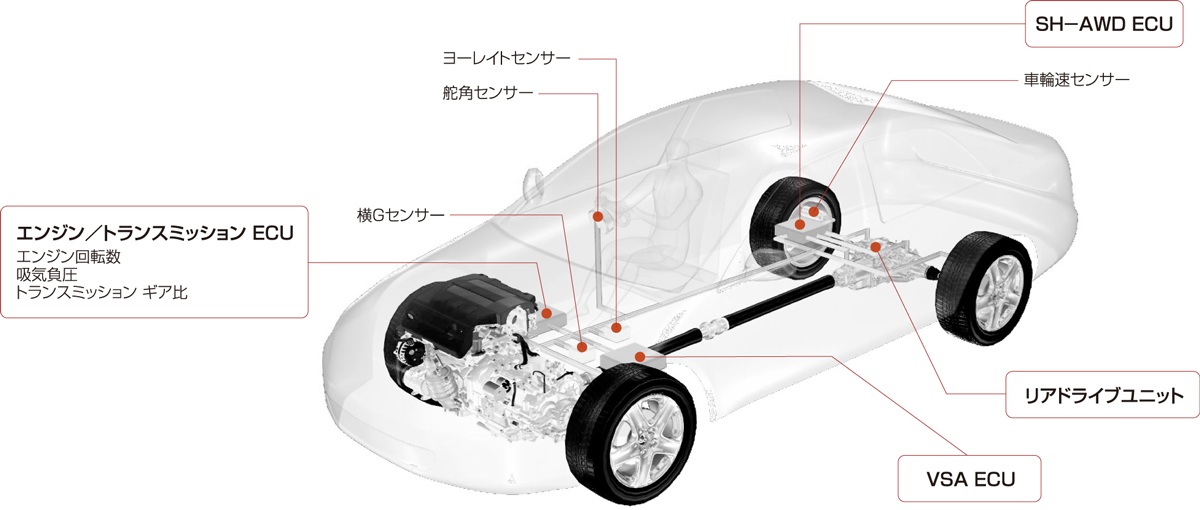
SH-AWDシステム構成
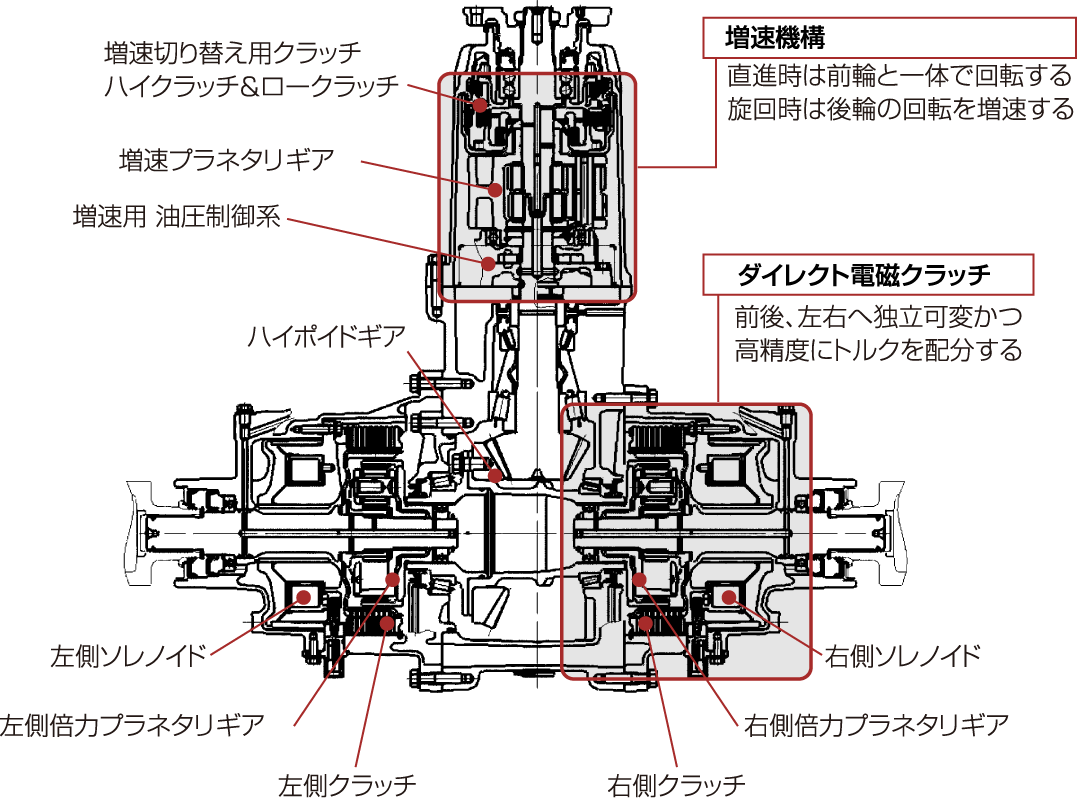
SH-AWDリアドライブユニットカットモデル
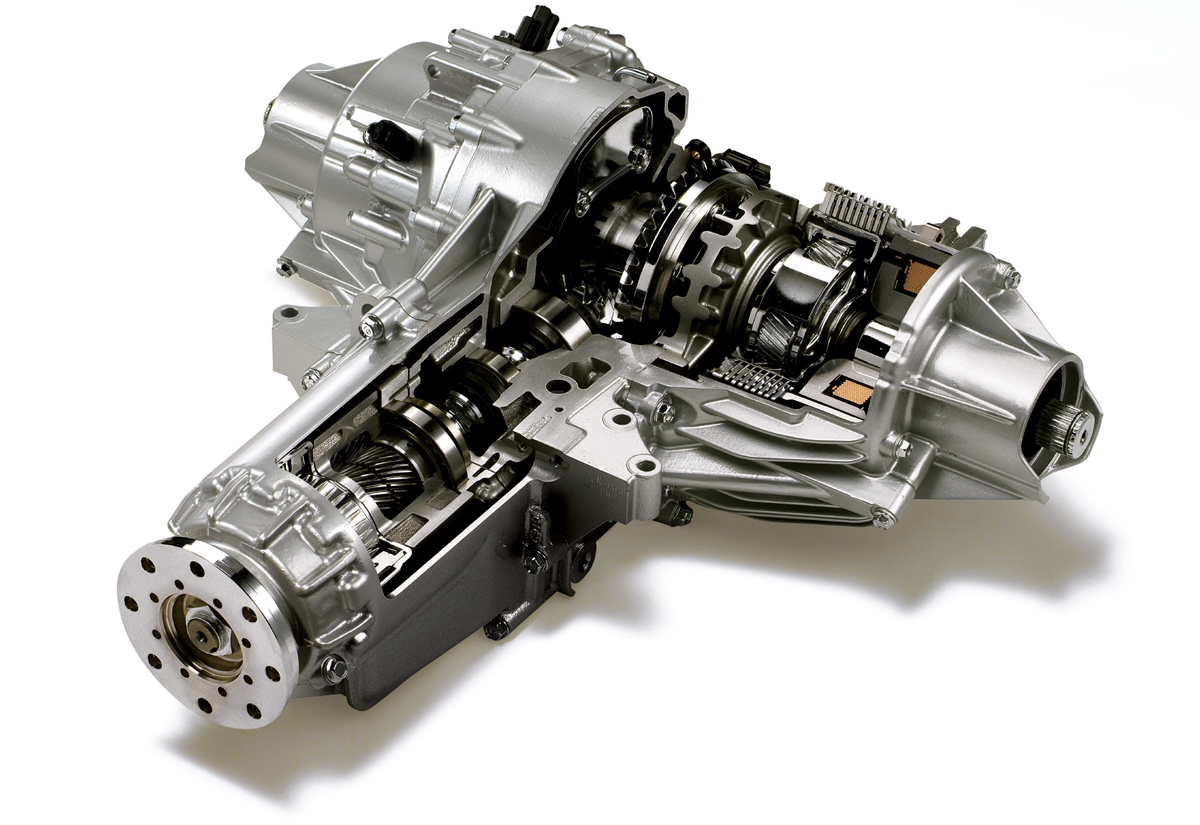
SH-AWDはCFRP(カーボン繊維強化プラスチック)製プロペラシャフトの後方に配置するリヤドライブユニットが、左右への駆動力配分と後輪への回転増速を実行する。リヤドライブユニットは旋回時にプロペラシャフトからの入力回転を高める増速機構と、増速機構からの入力回転を左右輪の回転に変換するハイポイドギヤ、駆動力を精度高く配分制御する左右一対のダイレクト電磁クラッチで構成される。初期はATTSと同様に油圧多板クラッチで開発を進めていたが、油圧配管を用いると故障の原因につながるとの考えから電磁クラッチに切り換えた。
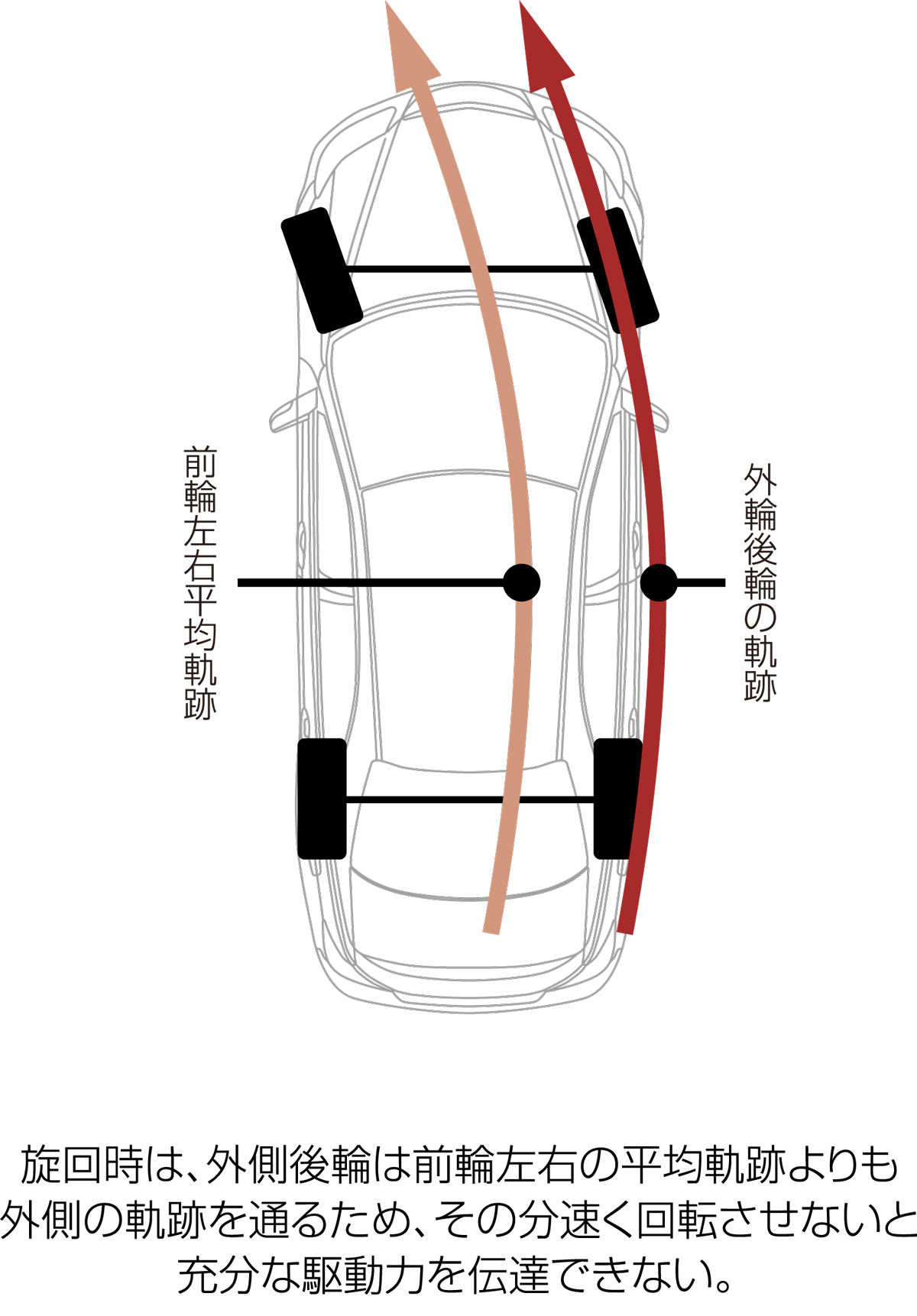
旋回時の四輪の軌跡を確認すると、増速機構が必要なことがわかる。フロントに横置き搭載するパワートレーンのトランスファーを通じプロペラシャフトに伝わる回転速度は左右前輪の平均値となる。旋回時、外側後輪の軌跡は、この左右前輪平均の軌跡より外側を通る。この状態でクラッチを圧着すると、回転速度は前輪平均<外側後輪なので、外側後輪は減速されてしまい抵抗になる。これを回避するため、プロペラシャフトの回転を増速する必要がある。
旋回時の前後輪回転速度差は前輪の舵角によって変わるが、計算の結果、15度切ったところで最大となり3.8%の回転速度差がつくことがわかった。そこで、スリップ率などを勘案し、増速率を5%に設定した。
車輪軌跡イメージ図
増速機構はプラネタリーギヤとワンウェイクラッチ、油圧アクチュエーターで構成される。具体的には、歯数の異なる入力軸上のサンギヤと出力軸上のサンギヤ、これにそれぞれ噛み合うピニオンンギヤを一体にしたツインピニオン、このツインピニオンを保持するプラネタリーキャリア、このキャリアと入力軸を結合するワンウェイクラッチおよびロークラッチ、キャリアとケースを結合するハイクラッチで構成される。
直進時はロークラッチがローピストンを介してロースプリングに押し付けられ結合する。その結果、プラネタリーキャリアと入力軸が一体で回転し、直結状態となる。ピニオンギヤも自転せず、キャリアとともに公転する。ゆえに、回転速度差はつかず1:1の関係だ。
旋回時は増速の指令が入り、ケースに内蔵されたハイピストンは油圧によって荷重を発生し、ハイクラッチを押し付けて結合させるとともに、ローピストンを介してロースプリングを縮め、ロークラッチを非結合とする。そこでハイクラッチが結合すると、プラネタリーキャリアがケースに固定され、ピニオンギヤの公転が止まり、入力軸上および出力軸上のサンギヤと噛み合って回転を開始。入力軸サンギヤと出力軸サンギヤの歯数比によって1:1.05の増速状態が発生する。
リアドライブユニット構造
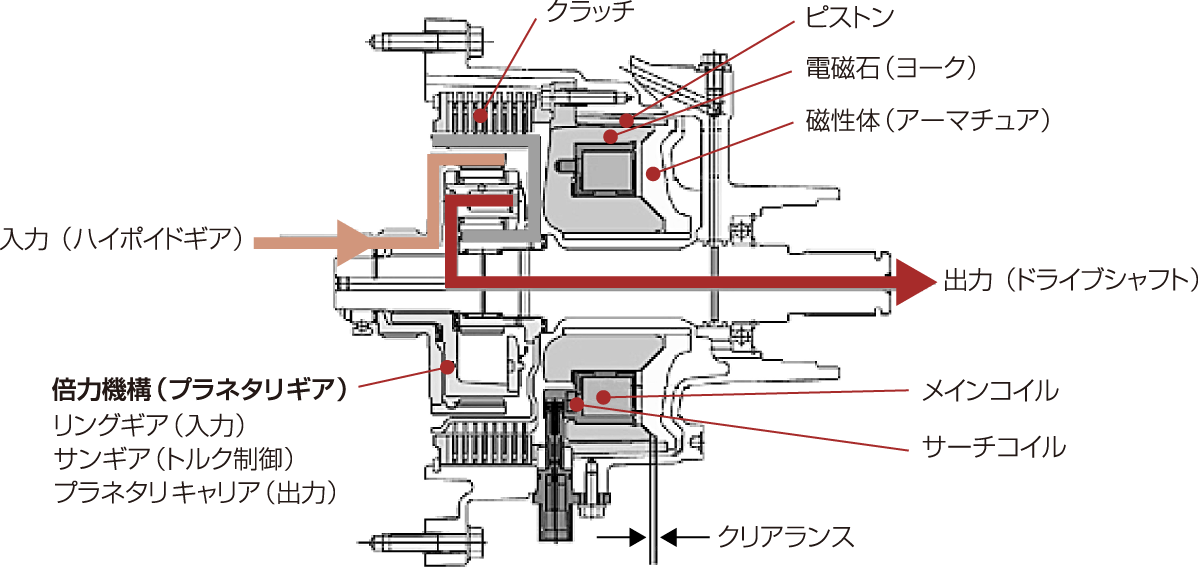
ダイレクト電磁クラッチ構造
ワンウェイクラッチは、前進時にプラネタリーキャリアが入力軸の回転を追い越さない方向に組み付けられた。また、前進時にキャリアと入力軸の直結機能を確保することで、後退時やエンジンブレーキ作動時に必要なロークラッチの小型化に寄与した。合わせて、増速時のキャリア固定を妨げない構造となっている。この増速機構は燃料タンクの下部に位置するため、地上高が確保できるよう小型化を追求して設計した。
前後と後輪左右の駆動力は、ハイポイドギヤ左右のダイレクト電磁クラッチの締結力を調節することで制御する。コイルに電流を流すことで発生する電磁力で直接多板クラッチを制御するダイレクト電磁クラッチは、世界で初めての採用だった。メインコイルに電流を流すと磁力が発生し、磁性体が電磁石に引き寄せられ、ピストンを介してクラッチを直接押し付ける仕組みだ。押し付け力は電流量によりきめ細かく制御できるため、駆動力を自在にコントロールすることができる。
トルクの流れを見ていくと、プロペラシャフトから伝達されるトルクは、ハイポイドギヤを経由してリングギヤに伝達される。クラッチはアーマチュアからピストンを介して押し付けられ、ケースとサンギヤとの間に摩擦力を発生させる。リングギヤに入力されたトルクはプラネタリーギヤで倍力され、クラッチの伝達トルクに比例したトルクが、プラネタリーキャリアを介してドライブシャフトへ出力される。プラネタリーギヤを用いた倍力(小さな力で大きな力の作用を得る)機構を用いることで、電磁クラッチの小型化に結びつけた。
電磁石と磁性体の間のクリアランスはわずかしかないため、クリアランスが変化した場合は電流量に対するクラッチの押し付け力が変化し、正確な駆動力を伝達することができなくなる。そのため、サーチコイルを用いて磁束の変化をモニターし、電流量を補正することによってクルマの生涯にわたる高精度な駆動力制御を実現した。
SH-AWD制御ロジック
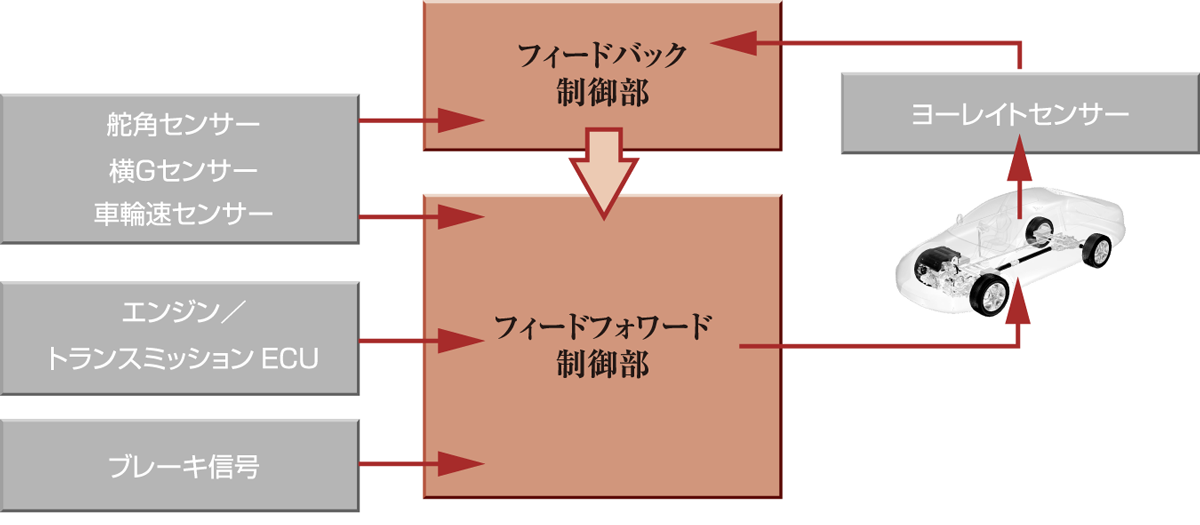
ドライバーの意思を最大限に尊重する考えから、駆動力の制御ロジックは、ドライバーの操作を情報源とするフィードフォワード制御をメインに構築した。制御フローは以下のとおりである。
アクセルペダル、ステアリングの操作量とブレーキ信号から、ドライバーの運転操作を判断
● エンジン回転数、吸気負圧等から、あらかじめ設定したトルクマップに照らし合わせてエンジンの発生トルクを推定
● トランスミッションギヤ比とトルクコンバーターのトルク比等から、車軸上の総駆動トルクに換算
● 走行速度、トランスミッションギヤ比、スロットル開度等の走行状態に応じて、前後輪のトルク配分比を設定する
● 総駆動トルクと前後輪のトルク配分比から後輪トルクを算出
● 後輪の平均速度と操舵角よる推定横加速度と、横加速度センサー、ヨーレートセンサーから旋回量を算出
● 旋回量に基づき、後輪左右の各駆動トルクを算出
● 後輪左右の各駆動トルクを電磁クラッチへの電流設定として出力する
車両特性の変化や路面の環境変化により制御精度が低下する可能性があるため、以下のフローのフィードバック制御で補正するプログラムとした。
車体モデルに基づき、車体重心点におけるスリップ角を推定する
● 旋回量に応じたスリップ角しきい値と推定スリップ角の比較から、スリップ角が大きいと判断した際は、フィードフォワード制御によって求めた後輪左右トルク差を縮める補正量を出力する
● それでもスリップ角の減少傾向が見られないときは、後輪へのトルク配分比を減らす補正量を出力する
SH-AWDは四輪に駆動力を与えながら、前後輪に駆動力を配分するとともに後輪に配分した駆動力を左右で配分することで、あらゆる走行状態において、四輪それぞれのタイヤの能力を最大限に引き出し、同時に旋回性能を向上させるシステムである。このシステムの適用により、さらに一歩、ドライバーが「意のまま」と感じられるようなクルマづくりを行なうことができた。




