
前2輪だけ動かす従来の操舵システムに、後2輪を操舵するシステムを付加したのが4輪操舵システム(4 Wheel Steering=4WS)だ。Hondaは1987年に発売したプレリュードに世界初の舵角応動型4WSを設定した。発売当時の技術名は「舵角応動タイプ ホンダ4輪操舵システム(以下「ホンダ4WS」)」である。

「ホンダ4WS」はハンドルの切れ角に応じて後輪を前輪と同方向(同位相)、または逆方向(逆位相)に操舵する仕組み。高速走行時にはレーンチェンジなど小さなハンドル角の使用頻度が多いため、後輪を同方向に操舵。また、狭い道や車庫入れなど低速で小回りが必要なときは大きなハンドル角が使用されるため、後輪を前輪と逆方向に操舵する。こうした制御により、俊敏で安定した操縦特性と高い小回り性能を両立させた。
「ホンダ4WS」開発の発端は、予防安全の向上だった。1970年代にアメリカ交通安全局(National Highway Traffic Safety Administration=NHTSA)はESV(Experimental Safety Vehicle:実験安全車)計画を提唱した。増え続ける交通事故に対し、衝突安全と予防安全の観点から状況の改善を図る狙いだった。
HondaはこのESV計画に参加することになったが、当時のHondaは軽自動車のみを生産し、小型車の生産を計画・試作している段階だった。小型車で衝突安全性を高める対策を行なっていくと大幅な重量増や室内空間の減少を招き、小型車の長所である経済性が損なわれるのは目に見えていた。そこで、予防安全の向上に軸足を置き、操縦性や安定性、運動性能を向上させる技術の研究を進めることにした。
さまざまな検討の中から生まれたのが4WSだった。衝突回避性能を高めるには、車両の横運動の応答遅れを減らすことが有効であることは理論的にわかっていた。4WSを適用して前輪と同時に後輪を制御すれば応答遅れが減少し、ハンドル操作に対して遅れなく反応して進路が変わる。その結果、衝突回避性能が高まり、安全性が高まるというわけだ。
開発は1977年(注1)にスタート。まず4輪操舵の理論モデルの構築に着手し、「後輪は高速では同方向、低速では逆方向に切ったほうが良い」という結論に達した。1978年に基本特許を出願すると、1979年にESV国際会議で学術論文を発表(注3)。1981年には2台の初代アコード前半分を接合した実験車を製作。鈴鹿サーキット西コースで実走行テストを行ない、理論が正しいことを実証した。
当初、後輪は高速では前輪と同方向に、低速では後輪と逆方向に切る車速応動型で検討していた。ところが、この方式を実現するにはシステムが複雑になって商品力に難が生じる可能性が指摘されたため、シンプルな機構が検討され、車速ではなく舵角で後輪を制御する舵角応動型とすることにした。通常、道路を走行する際にハンドルを切る角度はわずかである。これに対し、車庫入れやUターンは低速で行なう。そのため、小舵角の際は同方向に切れ、大舵角の際は逆方向に切れるようにすれば、狙いの機能は成立した。
従来の2WSはハンドルを切ると前輪だけが向きを変える。走行中にハンドルを切ると前輪タイヤは横滑りしながら回転し、タイヤ面と進行方向の間に横滑り角(スリップアングル)が生まれ、これによって進行方向に対して直角の成分であるコーナリングフォースが発生する。コーナリングフォースが立ち上がったところで車両は進行方向を変えるが、このとき、車両の重心点まわりにヨーモーメントが発生。これを受けて後輪タイヤにも横滑り角が発生してコーナリングフォースが生まれ、車両の旋回運動をバックアップする。
4WSの適用によって後輪が前輪と同時に同じ方向に向きを変えれば、2WSよりも応答良く後輪タイヤのコーナリングフォースが発生し、車両の旋回運動がスムーズに行なわれる。その際発生するヨーモーメントは小さくすることも技術的には可能で、安定性の向上にもつながる。
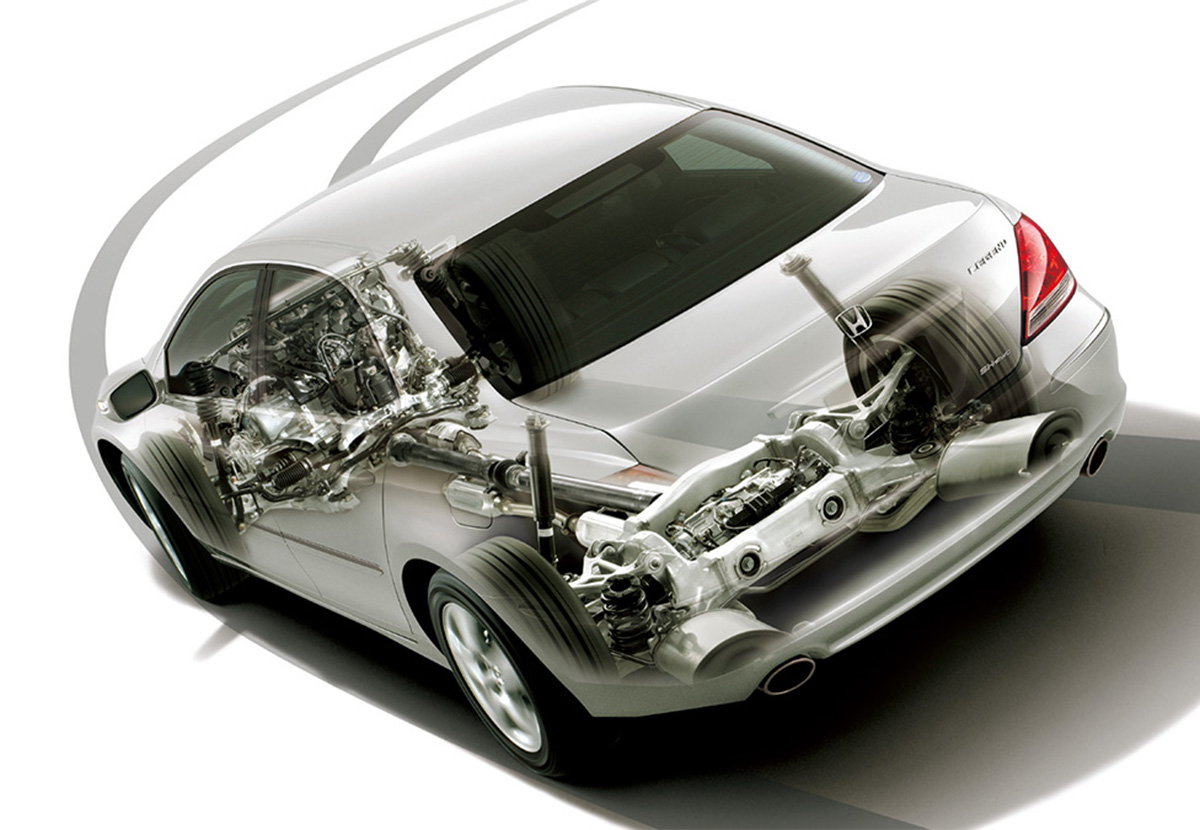
1986年10月に「ホンダ4WS」の技術発表を行なった後、1987年発売のプレリュードに設定された舵角応動型4WSは、前輪を操舵するフロントステアリングギヤボックスと後輪を操舵するリヤステアリングギヤボックスのふたつのサブシステムで構成され、フロントとリヤふたつのギヤボックスをセンターシャフトで機械的につないでいる。当初はシングルクランクの機構によってリヤステアリングギヤボックスを成立させることも検討されたが、シングルクランクでは同方向も逆方向も前輪と後輪を同じ舵角でしか切れない。小舵角で済む高速側に舵角を合わせると逆方向も小舵角となって効果が薄れてしまう問題があった。
4WSのシステム構成図
ふたつのクランク機構を組み合わせるダブルクランク方式とすることにより、この問題を解決。前輪操舵角小=同位相小舵角、前輪操舵角大=逆位相大舵角を実現した。
フロントステアリングギヤボックスは、操舵システムとしては一般的なラック&ピニオン式である。ハンドルを回すとステアリングシャフトが回転し、先端に取り付けられたピニオンギヤが細長い板に歯を刻んだラックに力を伝えて動かし、ラックの先に取り付けられたタイロッドを通じて前輪の向きを変える。このとき、ラックの左右方向の動きはアウトプットピニオンシャフトに伝えられて回転運動に変換され、床下のセンターシャフトを伝達してリヤステアリングギヤボックスに伝わる。
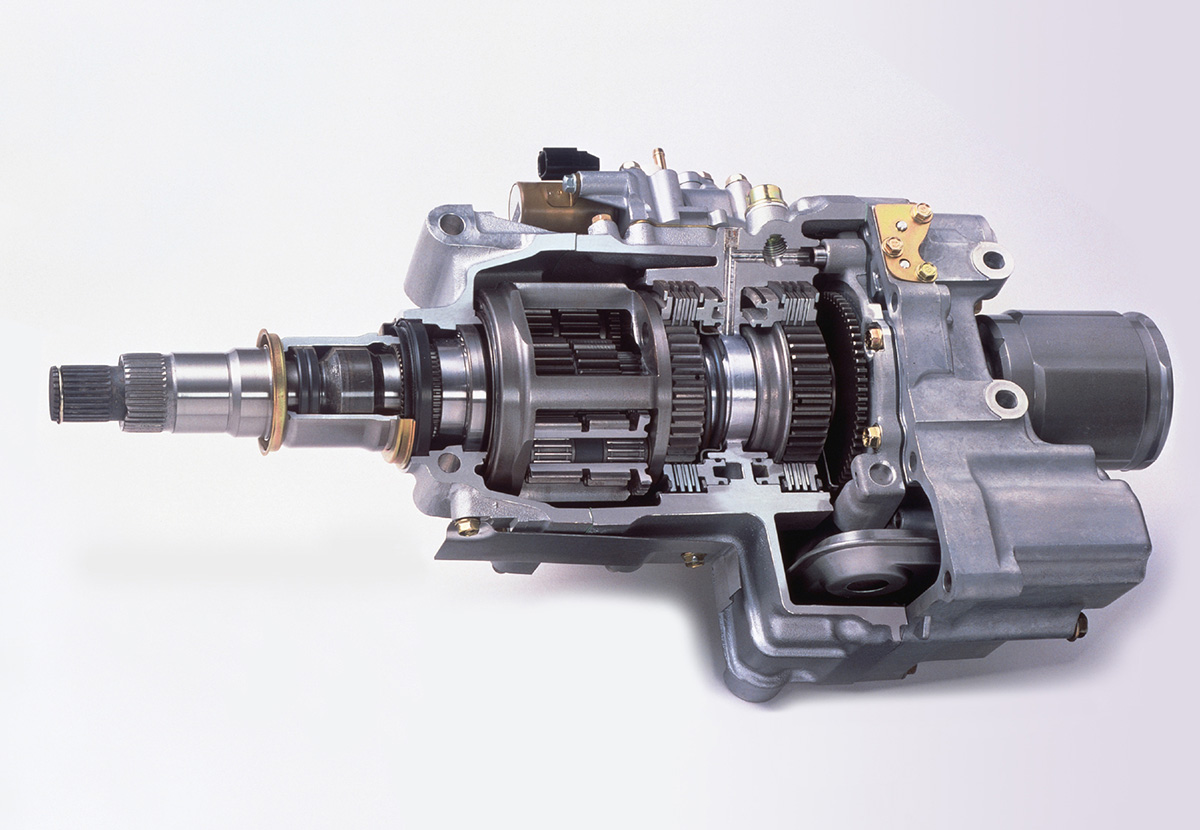
リヤステアリングギヤボックスは偏心シャフト、プラネタリーギヤ、インターナルギヤ、スライダー、ガイド、ストロークロッドで構成される。センターシャフトからの入力により、ひとつめのクランクとして機能する偏心シャフトが回転。偏心軸にはプラネタリーギヤが取り付けられており、ギヤボックス内に固定されたインターナルギヤと噛み合っている。偏心シャフトから力を伝達されたプラネタリーギヤは、インターナルギヤ内周を公転しながら、逆方向に自転する。ふたつめのクランクとして機能するプラネタリーギヤにも偏心軸があり、この偏心軸は自転と公転のふたつの運動を合成した動きをする。スライダーとガイドによってプラネタリーギヤ偏心軸の動きから上下の運動を吸収し、左右方向の動きだけをストロークロッドに伝達。タイロッドを介して後輪を操舵する。
プレリュードのロック・トゥ・ロックは2.5回転に設定。ハンドル角にすると900度で、ニュートラル位置から片側ロックまでは450度である。前輪は外側タイヤよりも内側タイヤのほうがわずかに大きく切れるが、いずれも最大35度前後切れる。
リヤステアリングギヤボックスの構造

偏心シャフトとプラネタリーギヤの軸の偏心量やプラネタリーギヤとインターナルギヤのギヤ比の設定により、後輪操舵の特性を作り込むことが可能だ。プレリュードへの適用では、ステアリング操舵角120度あたり、前輪切れ角にして10度足らずのところで後輪の切れ角は最大1.5度に達し、それ以上のステアリング操舵角では後輪の切れ角は次第に小さくなる。ステアリング操舵角230度、前輪切れ角20度足らずのところで後輪切れ角は0度になる。
ステアリング切れ角が230度を超えると、後輪は逆位相に切れ始める。ステアリングを450度回し、前輪が約35度切れたところで、後輪は最大値の5.3度切れる設定だ。プレリュード2WS仕様の最小回転半径は5.3mなのに対し、逆位相に切れる4WS仕様は0.5m小さい4.8mとなっており、小回り性が大幅に向上した。
リヤステアリングギヤボックスの作動に着目すると、ニュートラル位置からステアリングを右に切った場合、操舵角が小さな範囲ではストロークロッドは左に移動して後輪を前輪と同位相の右に切った後、操舵角が大きくなるにつれてニュートラル位置を通り、今度は右に移動して後輪を前輪とは逆位相の左に切っていく。
開発の発端は予防安全の向上ではあったが、舵角応動型4WSが前輪だけ操舵する従来の操舵システムだけでは得られなかった操舵応答特性を実現したのは事実で、Hondaが意識して取り組んでいた「曲がる」性能の向上に向けて大きな可能性を示した。




