
Hondaは2015年にCR-Zをベースに製作した4-Motor EV(車名はElectric SH-AWD with Precision All-Wheel Steer)でパイクスピーク・インターナショナル・ヒルクライム(以下PPIHC)に参加した。若手技術者を中心とするメンバーで構成された開発チームは大会終了後に解散するが、2016年のPPIHC参加に向けて再び若手技術者を中心にチームを結成し、短期集中的な開発を行なった。
PPIHC参加の目的は2015年と同様で、各輪のモーターを自在に制御することで実現するトルクベクタリングの効果を確認するためである。2016年の大会に向けては、ベース車を2代目NSXとした。競技専用車両を仕立てることも規則的には可能だったが、量産車の形で参戦することにこだわり、2015年に国内に先駆けて北米で発表された2代目NSXを選択(国内では2016年8月に発表)。ボディーは量産NSXの外板データを基に、フェンダーをわずかに張り出させるなどのモディファイを施したうえで炭素繊維強化プラスチック(CFRP)により成形した。
PPIHC 2016年モデル開発初期モデル









車体は押出成形アルミ材を中心とした複合素材によるスペースフレームの量産NSXとはまったく別の仕様で、PPIHCのレギュレーションに合致した鋼管フレーム構造とした。フロントとリアにツインモーターユニット(TMU)を搭載するのは、2015年の参加車両と同様。ただし、2015年車では量産用ツインモーターユニット(TMU)をベースとしていたのに対し、2016年車では新規に開発した。
車両レイアウト

2015年はコモナリティ(共有性)を重視する観点からベース車を量産CR-Zとし、構成するコンポーネントは量産品をベースとするコンセプトだった。そのためPPIHCではタイムを最優先せず、あくまでトルクベクタリングの効果を検証することに焦点を絞った。
2015年はエキシビションクラス(量産プロトタイプ)からのエントリーだったが、2016年はモディファイドEVクラス(無制限EV車)にエントリー。量産車形状ながらレース専用開発のEVに勝ち、なおかつ、前年の同クラストップタイムをしのぐ9分以下を目標とした。エキシビションクラスで参加した2015年のタイムが10分23秒829だったことを考えると、大幅な性能向上が求められた。
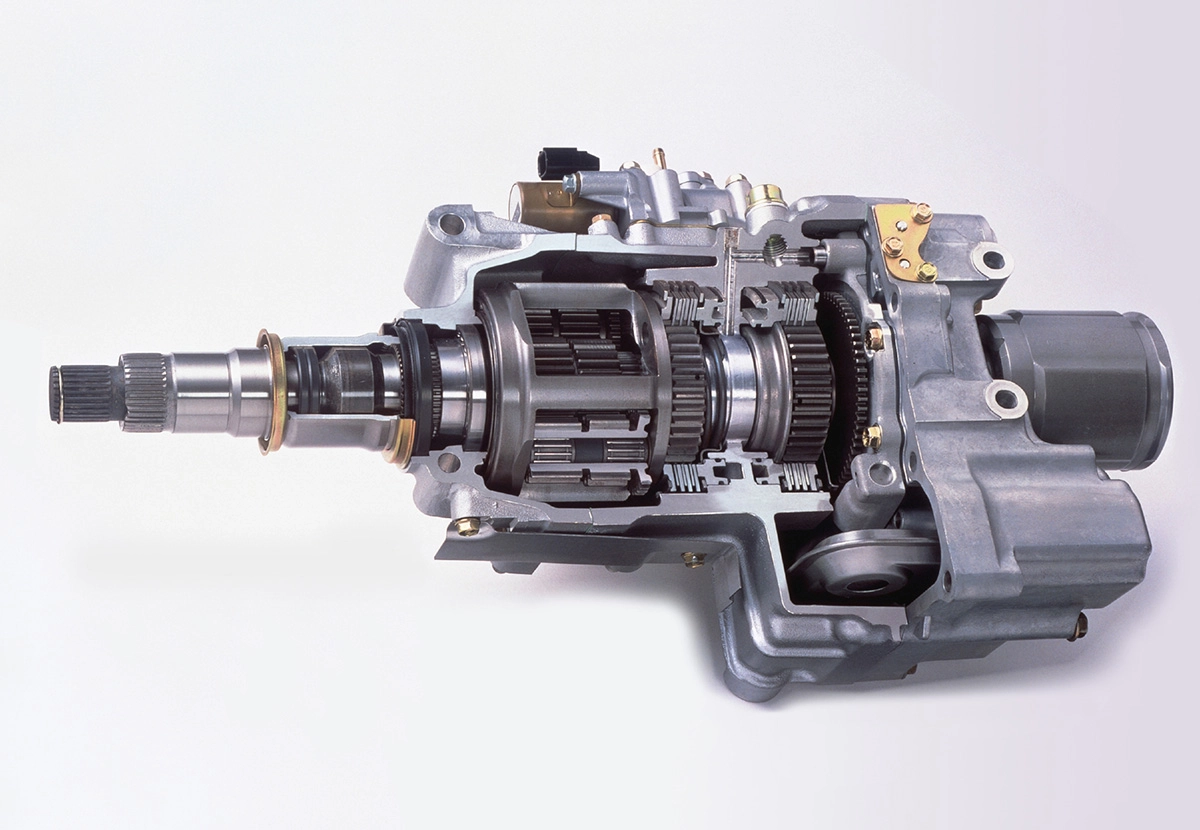
システム最高出力は前年の倍程度とした。SPORT HYBRID SH-AWDを適用したレジェンドやNSXのツインモーターユニット(TMU)は、車両中心側にあるプラネタリー減速機構に向けてアウトプットシャフトが伸び、そこで反転して中空シャフトの中をドライブシャフトが通る構造だった。
2016年のPPIHCに出場した4-Motor EV Conceptでは、アウトプットシャフトをモーターの外側に出し、プラネタリーギヤではなく平行軸で減速する構成に変更した。これによりドライブシャフトの径を稼いで剛性を高めることができたし、重量物であるモーターを低い位置に搭載することができて車両運動性能面で好影響が期待できた。また、2015年の参加経験を受け、出力と発熱のバランスなどを考慮し、モーターの巻き線数や極数を最適化した。
2015年の車両は後輪左右の独立操舵を可能にするPrecision All-Wheel Steer(P-AWS)を搭載したが、2016年は4モーターによるトルクベクタリングの機能検証に焦点を絞るため、非搭載とした。
ステアリング舵角、アクセル開度、車速、横G、ヨーレートなどの情報をもとにしたトルクベクタリングの制御例を下に記す。
2016年 4-MOTOR EV トルクベクタリング制御イメージ




コロラド州パイクスピークで開催されるPPIHCは標高2862mの地点をスタートし、約20km先にある標高4301m地点まで156のコーナーをクリアしながら駆け上がり、所要時間を競う。100周年を迎えた2016年の大会には8クラス100台が参加した。
モディファイドEVクラスから出走した4-Motor EV Conceptは決勝で9分6秒0を記録し、クラス2位、総合3位だった。目標とする9分以下のタイムは実現できなかったが、想定どおりのパフォーマンスを確認することはできた。また、パワー面で上回る競合車との走りをタイトコーナーで比較してみると、立ち上がりの断面では競合をしのぐ速さで加速態勢に入っており、トルクベクタリングの効果を確認することができた。
速く走れることもトルクベクタリングの価値のひとつだが、もっと大事なのは、違和感なく、ドライバーの思いどおりに走れること。それを高い次元で成立させるのが理想だ。例えば、乾燥した舗装路では思いどおりに走れても、滑りやすい路面では思いどおりに走れなくなってしまうことがある。ハンドルを切れば曲がるし、アクセルを踏めば加速する。そして、ブレーキを踏めば止まる。こうしたクルマにとって当たり前のことが、路面状況を問わず当たり前のようにできるようにしたい。これが実現できれば、ドライバーは不安を抱くことなく、信頼して走れる。
再現性の高さも重要だ。思ったように曲がれなかったり、思ったように止まれなかったりするクルマの場合は、マージンを多くとって走らなければならない。条件が変わっても、外乱があっても、いつもと同じように走れることが大事である。
2016年 PPIHCレース写真








このような走りを実現するために、Hondaは4モーターによるトルクベクタリングの技術を磨いている。気温や気圧、天候の変化が大きく、ガードレールのない崖にコースが設定された過酷な環境でタイムを競うことで、ドライバーの思い通り、すなわち「意のまま」と感じられる走りを実現する技術を検証し、次につながる貴重なデータを収集した。他社に先駆けて4-Motor EV開発に着手したHondaは、このシステムの有効性をPPIHCで証明することができた。
トルクベクタリングをはじめとする、ドライバーが「意のまま」と感じられるSuper Handlingの技術開発に終わりはない。人中心の技術を磨き続けるHondaにとって、移動を楽しむための技術開発は永遠のテーマなのだから。




