
かつてないオン・ザ・レール感覚と力強い加速性能により
異次元の走りを実現した
ハイブリッドシステム
「SPORT HYBRID SH-AWD」は、エンジンと3つのモーターによって四輪の駆動力を制御します。
ツインモーターユニット(TMU)の2つのモーターは、左右に独立した駆動力を伝えるトルクベクタリングによって、優れた回頭性とオン・ザ・レール感覚のコーナリングを実現し、エンジンと3つのモーターは、ドライバーのアクセル操作に瞬時に反応するリニアで力強い加速を実現します。
-
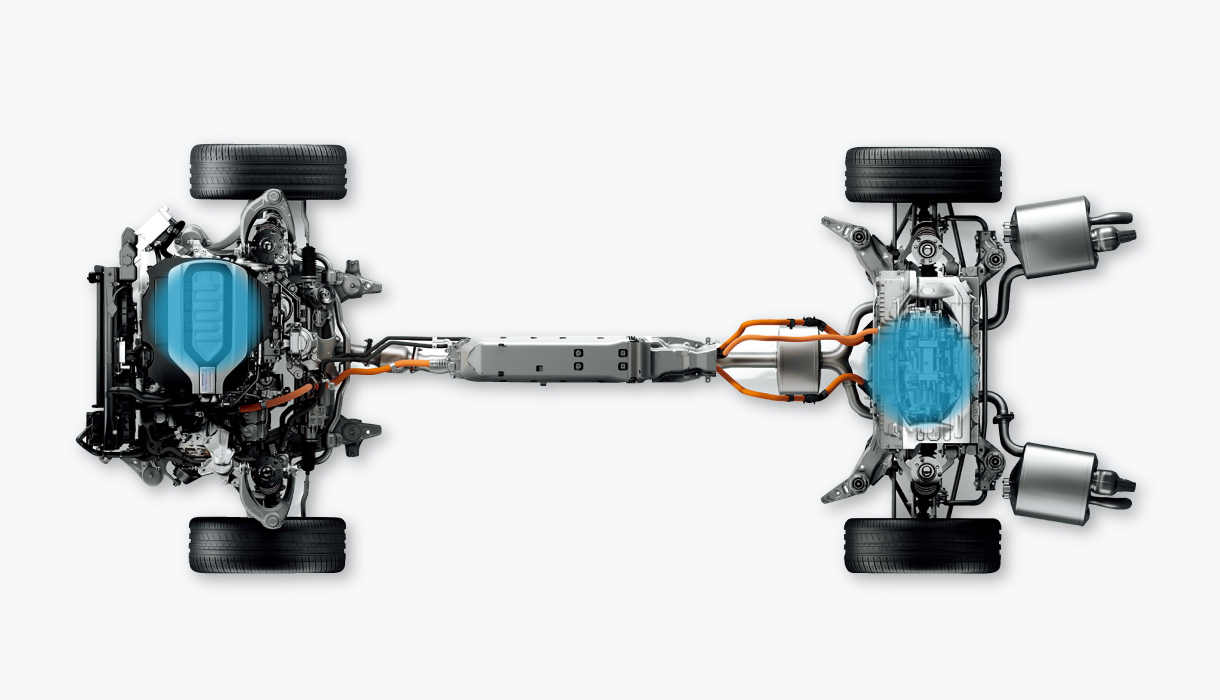

LEGENDのシステム構成
-
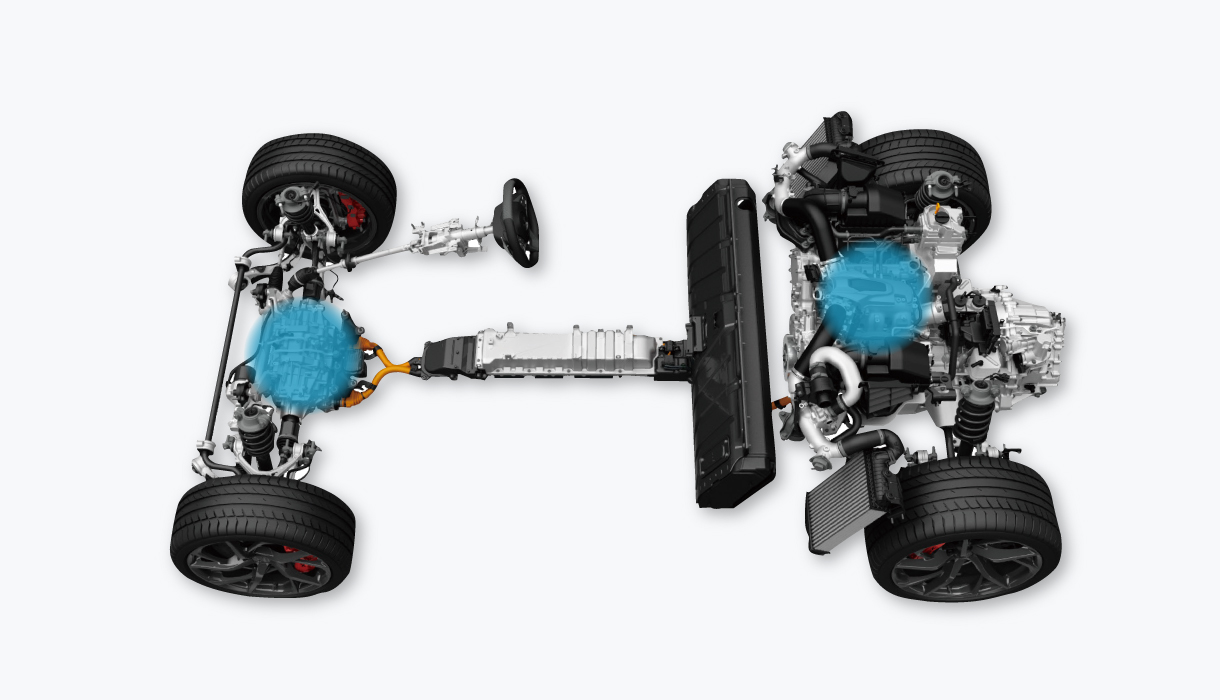

NSXのシステム構成
優れた回頭性と
オン・ザ・レール感覚のコーナリングを実現するトルクベクタリング
駆動力で曲がるとは?
左右の駆動力を変えて曲がる身近な例として手漕ぎボートがあります。
舵 (=ステアリング)のない手漕ぎボートは外側のオールを強く漕ぎ、左右の駆動力を変えて曲がります。
トルクベクタリング作動イメージ
旋回減速時(ターンイン)

- 左右のモーターをマイナスに制御して減速回生を行うとともに、旋回内側のマイナストルクを外側よりも大きくすることで、内向きのヨーモーメントを発生させます。その結果、ブレーキングしながらのターンイン時に、すぐれた回頭性をもたらします。
旋回時(コーナリング中)

- 旋回外側の後輪にプラスのトルクを与え、内側後輪にマイナスのトルクを与えることで、大きな内向きのヨーモーメントを発生させます。この結果、急なコーナーでも優れたライントレース性を発揮します。
旋回加速時(コーナー脱出)

- 後輪左右両方にプラスのトルクを与え、力強い加速を実現します。同時に、コーナーの特性に合わせた最適なトルクベクタリングを行うことによって、安定した姿勢でコーナーを脱出します。
※レジェンドの作動イメージ
―理想の走りを求めて―
Hondaのトルクベクタリングのあゆみ
意のままの走り。それは、世界中の自動車メーカーが追い求める理想でしょう。Hondaがその実現のため、そして、新たな走りの喜びを創造するために、のちにトルクベクタリングと呼ばれる画期的なアイデアを提案したのは1990年代のことでした。
-
- 1990年代初頭
- 「ダイレクト・ヨー・コントロール」と「ベータ・メソッド」
Hondaは1990年初頭、“左右の駆動力差によって曲る力を発生させる”という「ダイレクト・ヨー・コントロール」の考えを発表、更に運動性能の新しい解析手法である「ベータメソッド」を開発し、これを用いて車両挙動発生のメカニズムを解析することにより、「ダイレクト・ヨー・コントロール」の実現を目指した。
-
- 1996年
- ATTS(アクティブトルクトランスファシステム)
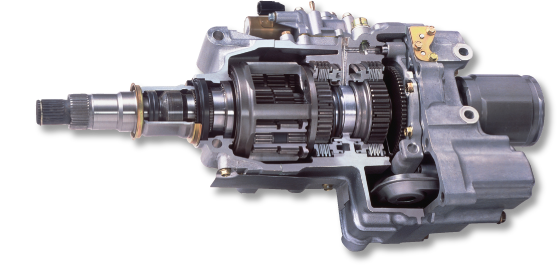
たゆまぬ研究の結果、1996年に「ダイレクト・ヨー・コントロール」の考え方を「ATTS(アクティブトルクトランスファシステム)」として完成させ、プレリュードに搭載しました。多板クラッチとギアによって前輪左右の駆動力比率をコントロールし、FF車の旋回性能を大幅に向上。運転の楽しさを大きく高めたのです。
- 2004年
- SH-AWD(Super Handling All-Wheel-Drive)

Hondaの挑戦はさらに続きます。2004年には、電磁クラッチとギアによって、左右輪のみならず前後輪の駆動力配分までを行う世界初のシステム「SH-AWD」を開発し、レジェンドに搭載。四輪それぞれの駆動力を最適にコントロールすることで、旋回性能、直進安定性、駆動性能を大幅に高めました。
-
- 2014年
- SPORT HYBRID SH-AWD(SPORT HYBRID Super Handling All-Wheel-Drive)

駆動力の差で運動性能を高める―。そのアイデアは、ついに最先端の電動化技術に出会います。それが、エンジンと3つのモーターによって高度なトルクベクタリングを可能にする「SPORT HYBRID SH-AWD」です。2014年のレジェンド ハイブリッドに搭載されたこのシステムは、モーターを用いることで、駆動力(プラスのトルク)と減速力(マイナスのトルク)の左右配分をも可能にし、それまで加速旋回時だけであったトルクベクタリングを減速旋回時にまで拡大。あらゆる走行状況で理想的な走りを実現したのです。
最も効率のいい走行モードを走行状況に応じて自動で選択
SPORT HYBRID SH-AWDには、TMUが備える2つのモーターによる「EVドライブ」と、モーターとエンジンの両方の駆動力を使う「ハイブリッドドライブ」、エンジンの駆動力のみで走る「エンジンドライブ」の3つの走行モードがあります。その際、「前輪駆動」「後輪駆動」「四輪駆動」の3つの駆動方式に切り替わります。これらのモードは、ドライバーの要求と走行状況に応じて自動的に選択されるため、ドライバーはその切り替わりを意識することはありません。あらゆるシーンで、ドライバーの意思を尊重した「意のまま」の走りを実現します。
発進
エンジンを停止させたまま、フロントモーターの駆動に比べて高効率なTMUによる「後輪駆動」で、静かに、なめらかに発進、加速します。
ゆるやかな加速
低車速でのおだやかな加速では、エンジン効率の高い領域を用いて、「エンジンドライブ」モードで「前輪駆動」します。フロントモーターはジェネレーターとして機能し、エンジンの余剰トルクで発電。無駄のない走行充電を行います
低速クルーズ
市街地などでの低速、中速クルーズでは、バッテリーに蓄えた電力を使い、TMUで「後輪駆動」します。
力強い加速
エンジンによる「前輪駆動」と、TMUによる「後輪駆動」の両方を用いる「ハイブリッドドライブ」モードで力強く加速します。
高速クルーズ
高速クルーズでは、エンジンを効率のよい領域で運転できるため、エンジンドライブモードで前輪駆動します。
減速
3つのモーターをジェネレータとして活用し、前後輪すべての減速エネルギーを電力として回生します。さらに、電動サーボブレーキシステムのきめ細やかな制御により、電力回生量を最大化します。
AWD制御
雪道などのすべりやすい路面や急な登り坂では、ハイブリッドドライブモードの四輪駆動に遷移し、優れた操縦安定性と走破性を実現します。















