
※ 2004年の記事です
現実の走行をリアルに再現した、
世界初「二輪車用ライディングシミュレーター」
概要
Hondaはかねてより「人間尊重」という企業理念のもと、安全を最重要課題のひとつとして位置づけ、車のハード面はもちろん運転者教育などの普及活動にも積極的に取り組んできた。ライディングシミュレーターの開発は、路上での危険な状況をシミュレーター上で安全に体験し、そのプロセスを運転者に正しく理解してもらうことを目的として1988年にスタート。その後、改良を重ね1996年に量産を開始。2001年に安全運転のさらなる普及をめざした第2世代のシミュレーターを開発した。
二輪の安全教育は、自動車教習所の実技や講義での教育が中心となっている。そのため、実際の交通環境を体験することなく免許を取得し、路上に出て初めて実際の危険な場面に遭遇した際に、とまどうこともある。ライディングシミュレーターは、この「路上での危険な状況をシミュレーター上で安全に体験」させること、二輪車の基本機能である「走る」「曲がる」「止まる」の運動をシミュレートし「技量の訓練」に使えることを目標に開発をスタートした。1996年の二輪免許制度の改正にともなって、教習用教材としての型式認定を取得し、全国各地の自動車学校で活用されて高い評価を得ている。2001年に開発された第2世代モデルでは、低コスト化、スクーターへの対応、軽量・コンパクト化を実現し、各教育機能を充実させている。
Hondaライディングシミュレーターの特徴
Hondaライディングシミュレーターの開発目的は、従来の学科と実技教育だけでは経験しえない混合交通のなかでの危険な状況をシミュレーター上で安全に体験し、その状況に至るプロセスを運転者に正しく理解してもらうことであった。そのためには、いかにリアルにライダー自身と周囲の状況を刻々と再現していけるかが最大のテーマとなる。
1988年に開発がスタートし、1996年に量産された「世界初のライディングシミュレーター」

このシミュレーターの特徴は、実車と同様にアクセル、ブレーキ、クラッチ、ハンドル等の操作系を持ち、実車と同様の乗車姿勢をとれるところにある。さらにはライダーの運転操作に応じて二輪車の挙動を再現し、前方の大画面モニターにはコンピューターによって道路や建物、そのなかを走る他の車両の動きを介して実際に起こりうるさまざまな交通場面をつくりだし、走行風やエンジン音までも連続的に発生させる機能をもっている。いわば、実際に公道を走行している感覚にきわめて近い体験を、シミュレーター上で再現することが可能となったのである。
基本構成

交通環境の再現

世界初に挑戦 ライディングシミュレーター開発ストーリー
1988年、「世界初の二輪車用ライディングシミュレーター」の研究がスタートした。当時、世界には巨大な四輪車用シミュレーターは存在したが、二輪車用シミュレーターに関する情報は皆無であった。そして朝霞研究所には、映像・音・運動理論・システム制御のエキスパート、二輪車の安全運転教育にノウハウを持つ本社安全運転普及本部と、ロボット制御で定評のあるホンダエンジニアリングからもメンバーが参加し、開発はスタートした。
ライディングシミュレーターの狙い
ライディングシミュレーターの狙いは、『危険な状況の体験』と、『運転技量まで含めた訓練用』として使えること。そのためには、二輪車の基本機能である“走る”“曲がる”“止まる”の運動をシミュレートし、体感が得られることが大きな目標であった。走行解析担当は、乗車感覚を中心に解析を進め、技術計算担当は、2輪車の運動を数式化していった。音響担当は、2輪車特有のエンジン音を再現する手法を研究した。また映像担当は、将来のコンピューターの進歩に賭け、映像発生装置としてコンピューターがリアルタイムで映像を作り出すCGI方式を選んだ。そして数ヶ月後、乗車部が可動ユニット上に組み上げられ、コンピューターの指令通りに動きはじめた。また音響部からはデジタル化されたエンジン音が再生され、映像部は毎秒30コマの映像生成に成功した。運動計算部は、実際のライダーの操作入力値に対して、実走と相関性の高い計算結果を出し始めた。
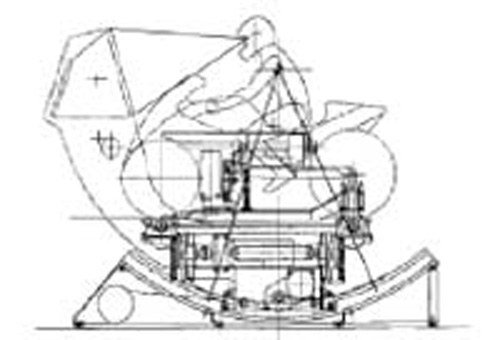
プロトタイプ1号機
1989年、プロトタイプ1号機が組み上がる。このシミュレーターは、乗車部、映像表示部などの主要部分を巨大なゆりかごに乗せ、全体が可動する構造であった。細部のチューニングも完了し、二輪車のエキスパートによる試乗が始まったが、全員が転倒するという散々な結果であった。それは、シミュレーター上でG(加速度)を感じられない、つまりライダーが車体の姿勢を感じ取れないにも関わらず、二輪車の操縦を要求する。という根本的な問題であることが判明した。プログラムの変更を繰り返しながら、「危険を安全に体験できる」という原点に立ち返り、“二輪車の操縦を要求する”ものから、“誰でも容易に乗れる”こと、“二輪車らしい乗り味を持たせる”ことに的を絞り、プログラムを変更した。
プロトタイプ1号機

エピソード「危険な状況の体験」
1号機では『危険な交通状況の体験』のためのシミュレートが進められた。各車両に知能を持たせ、コンピューター上に危険な特性を与えた車両と、一般的な特性を持つ車両とを混合走行させるプログラムである。ところが、走り続けても危険な状況に遭遇しない。それどころか走行車両が少なくなっていく。コースを走り廻って、やっと謎が解けた。コースのとある交差点で、危険な特性を持つ右折車と直進車が事故を起こしており、その後ろが渋滞。すべての車両がそこに集中していたのである。この件から各車両の知能化は中止。そして『危険な状況の体験』を演出するプログラム技術はさらに磨かれていった。
プロトタイプ2号機
1990年、次のステップは実際の教育現場での活用に向けての検証であった。そこで、教育機能の向上とコンパクト化を目的に、プロトタイプ2号機の開発がスタート。2号機では採点システムも採用し、スクリーンも52→120インチへと大型化。さらに走行中に受ける風も体感できるよう機能アップした。この2号機は青山ホンダウェルカムプラザで発表し、1991年に鈴鹿交通教育センターに設置。世界初の教育用ライディングシミュレーターとして、インストラクターとともに教育効果の検証を2年間にわたって実施。実際の教習生も含め、3500名の乗車実績をベースに、ライディングシミュレーターを使った効果的な教育手法の確立もできた。
プロトタイプ2号機

プロトタイプ3号機
プロトタイプ3号機の主たる開発目標は、2号機の10分の1のコストで、しかも性能も上回ることであった。パソコンの大幅な性能向上、システムの再設計、制御プログラムのリファイン、可動ユニットのシンプル化などでコスト低減の目処が立った。ところが全体コストの1/2以上を占めている映像発生装置は、要求を満足できる既存の映像発生装置はどこにもなかった。そこでチームはシミュレーター用映像発生装置について高い技術力と経験を持つ、アメリカのEVANS&SUTHERLAND社に開発を打診。Hondaの要求仕様に沿った映像発生装置が誕生した。
プロトタイプ3号機画面

プロト機から量産機へ
1994年、ライディングシミュレーターの研究はプロトタイプ3号機を最後に幕を閉じる。この時点では量産に向けての計画もなく、6年間におよぶ開発チームは解散した。ライディングシミュレーターはストップしたと誰もが思い始めた頃、二輪免許制度が改正され、大型二輪免許の教習所での取得とともにシミュレーターの教習課程が追加となった。チームは再び結成され、量産に向けて開発がスタートした。さらなるコスト低減、新たな設計基準や、テスト基準を策定しながらの開発である。また、公安委員会の型式認定取得も必要となった。そして1996年6月19日、量産1号機がラインオフした。数多くの教習所で、実車のような走行感覚や、交通環境、機能に高い評価を頂き、より安全で快適な交通環境作りの一助となることができた。

白バイ隊員訓練用シミュレーター

優秀な性能が認められ、白バイ隊員訓練用ライディングシミュレーターを開発。操縦特性や動力性能を白バイ用にチューニングし、違反車両の登場等、新たな機能が追加されている。
第1世代ライディングシミュレーターのメカニズム
二輪車の操縦はライダーがバランスをとって初めて成立するものである。ライディングシミュレーターの開発において、二輪車の運動を模擬的に再現するには人間特性の研究も不可欠であり、また制御系のシステムも複雑になる。つまり、シミュレーターで二輪車の運動方程式に合せた可動部の制御を行った場合、極低速や旋回運動での不安定、加減速感やロール感などの乗車感覚を得ることが困難である。しかし画像、音響等の環境情報を適切に提供することにより、ライダーに錯覚を与え乗車感覚を再現させることが可能である。
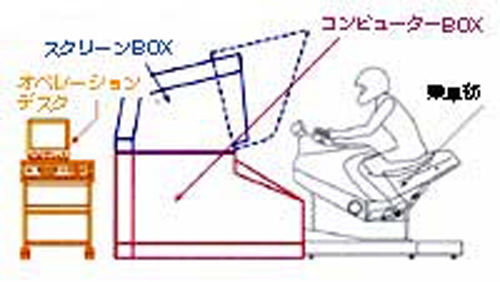
基本構成
ライディングシミュレーターは以下の4つの構成部からなっている。
- 乗車部
- 400ccクラスの車体サイズで、操作系は実車そのものを流用。
コンピューターボックス- シミュレーターの中枢部、パソコンを中心に数々の装置が収納。
スクリーンボックス- スクリーンボックスは映像スクリーン部とフードから構成され、ライダーが映像に没入できるように配慮。
オペレーションデスク- 設定、操作が容易にできるよう、マウスを使ったインターフェースを採用。
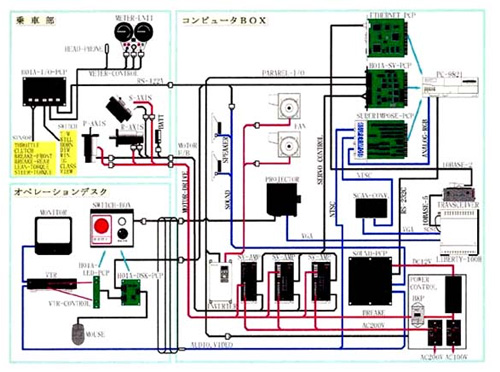
全体システム
ライダーの操作は、インターフェース回路に入力され、通信によってホストコンピューターへ伝達。ホストコンピューターはその信号をもとに、エンジンや車体の挙動、また自車や映像に登場してくる他車両の位置等を計算し、その結果を映像発生装置、音響装置、サーボアンプ、インバーターに指令として送る。その結果、車体が挙動し、スクリーンには視界が映しだされ、スピーカーからエンジン音が聞こえ、体には走行風が感じられ、実際に走行しているかのような感覚が得られる。
システム図
要素技術
モーション
シミュレーターでは、乗っている気にさせることが重要なポイントになる。これらは、さまざまな動きを再現できるプロト機を利用し、必要な軸数や作動範囲について乗車感覚を重視しながら決定。そして3つのサーボモーターにより車体のロールの動き、ピッチの動き、ハンドルの動きを実車に近い乗車感覚で再現させることができた。また、乗車部には可動用モーターのほかに「ライダーの操作を電気信号に変換」、「メーター指示やインジケーターの駆動」などの機能をもったインターフェース回路が装備されている。
車体の動き

映像

映像装置は、フライトシミュレーターでも使われているCGI(Computer Generated Image)方式を採用。運転者の操作に応じて変化する映像を専用コンピューターが生成し、毎秒30フレームのなめらかな映像をつくりだしている。プロジェクターから投影される映像をスクリーンに映しだす部分は、焦点距離を確保しつつ小型化をはかるため、鏡で1回反射させる方式を採用。正面の52インチスクリーンは、明るい室内でも良好なコントラストが得られる、レンチキュラータイプを採用し、そのなかに左右後写鏡映像も内蔵した。
音響・走行風
音響装置はPCM方式(Pulse Code Modulation)を採用し、実際の二輪車のエンジン音をデジタルサンプリングしたものを用いている。ホーン、チェンジ、ステップの接地音、風切り音等も収録。さらに画面に登場してくる他車両のエンジン音は、速度差によるドップラー効果までも再現した。これらを、コンピューターボックスにステレオ配置された16cmスピーカーから出力。ヘッドホン端子も車体側に装備している。走行風の構造はインバーターで制御されるファンが、車速に比例した走行風を左右2ヵ所のダクトから発生させるものである。
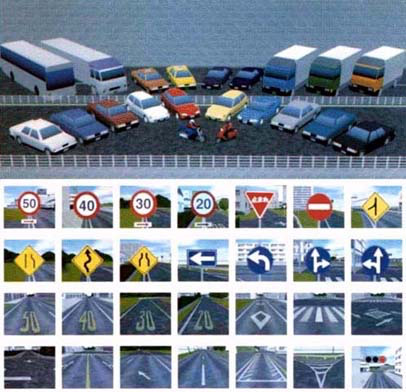
交通環境
建物、ガードレール、信号など、いろいろな交通標識、表示および多くの車両が登場し、複雑な交通環境を再現できる。
登場車両と標識
オーバースピードコーナリングや横風体験等の二輪特性コース、一般的な混合交通を再現した法規走行コース、危険な場面を体験できる危険予測コースと多種にわたるコースを用意した。さらに高速道路もオプションで用意し、教育の幅を広げている。
街全体の模型

オペレーション
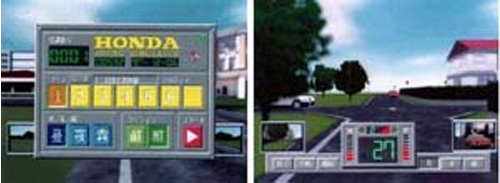
オペレーションデスクにはモニター、VTR、スイッチボックス、そしてマウスが装備されている。シミュレーターの起動から終了まで、モニターに表示されるスイッチボタンをマウスでクリックするだけの簡単な操作を実現している。またスイッチボックスには、赤外線発光LEDが取り付けられており、乗車状況の記録用VTRを制御し、録画スタートや停止をコントロールしている。
コントロールパネル
オプション
運転行動を再現するリピート機能、自車をさまざまな視点から見ることができるマルチアイシステム(オプション名)、夜間モード、霧モードなど、より教習効果を高める機能を標準、またはオプションで用意している。
マルチアイシステムの映像

夜間・霧の映像

第2世代ライディングシミュレーターの誕生
1996年に量産化された世界初のライディングシミュレーターは、安全運転教育用機材として、二輪車の教習カリキュラム向け3に実用化され、事故防止に有効な危険予知能力の向上に役立っている。2001年、Hondaは安全運転教育のさらなる普及を目指して、ライディングシミュレーターとしての高い性能を維持しながら、低価格化やコンパクト化を実現し、教育機能を充実させた第2世代となるライディングシミュレーターを開発した。
新型ライディングシミュレーターの特長
新モデルは、前モデルで評価の高い性能を維持しながら、さらなる普及と機能向上を目的にまったく新しく開発された。特長としては、従来に対しての「大幅な低価格化」、「スクーターへ容易に切り替わる乗車部」、設置を容易に行える「軽量コンパクト設計」、「臨場感の向上した映像と音響」、「各種教育機能の充実」がポイントとなっている。
徹底したコンパクト設計
新モデルは前モデルと比較して、長さで600mm、幅で140mm小型化し、重量に至っては1/2近い軽量化を達成。これは、二輪の動きを再現するモーションベースの再設計による部品点数の削減と、アルミ製プロジェクターBOXが大きく寄与している。構造レイアウトは、新設計の短焦点レンズを備えたプロジェクターの採用と制御系機材をBOX内に最適配置することで、大画面化にもかかわらずプロジェクターBOX自体もコンパクト化している。
前モデルとの比較
L:2940mm→2330mm
W:1320mm→1182mm
H:2010mm→1740mm

可動システムを大幅に変更
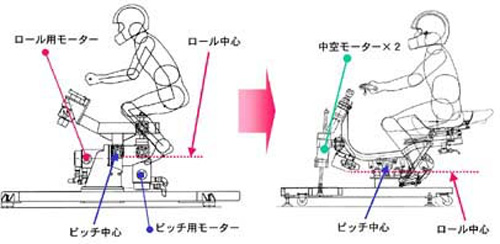
最大の変化は、可動部分であるモーションベースである。従来は左右方向の傾きであるロール、前後方向の傾きであるピッチ、ともに専用のモーターと減速機を用いていた。これは、ロール用モーターがピッチ用モーターも動かすために大きな荷重が掛かり、剛性の高い軸受けや頑丈なフレームが必要であった。新モデルでは、これまでの専用モーターと減速機のあった位置に軸受けを配置して同じピッチ、ロール中心を維持し、駆動モーターをフロントの左右に置くことで同様のロール、ピッチ運動を再現。その結果大幅な重量軽減を達成することができた。
モーションベース
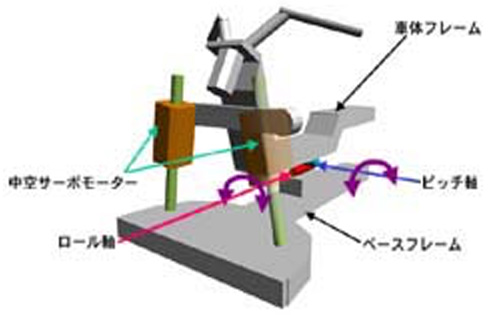
T型のベースフレームと車体フレーム間に、ロール軸とピッチ軸を配置。この軸位置が乗車時の体感に大きく影響するので、従来の軸中心に一致するようレイアウトしている。車体フレームの前方には中空サーボモーターを保持するためのアームが配置されている。
このアームにユニバーサルジョイントを介して中空モーターの本体を結合。ボールネジのシャフトは、ベースフレームへユニバーサルジョイントで結合される。この結果、車体は3点で支持され姿勢が決定する。そして左右のモーターが上下同方向に動く事でピッチングを再現。左右のモーターが反対方向に動く事でローリングを再現する。
制御システム

まず、ホストコンピューターを中心にライダーの操作をセンサーから取り込み、二輪の運動演算を行う。演算結果はエンジン回転数や速度、車体の姿勢等の情報として各装置に伝達。そしてメーターでは速度を表示し、音響装置はエンジン音、環境音を発生し、映像発生装置ではライダーの位置、姿勢に応じた画像を作成。同時にサーボモーターは車体の姿勢を変化させて、ライダーに実際乗っているかのような錯覚を与えることになる。
教育機能
従来のオペレーション画面には、速度、ブレーキ入力等のライダーの操作と前方視界の映像を合成したものを表示していた。新モデルではそれに加え、鳥瞰地図とメッセージウインドウを追加した。地図は任意の場所を拡大表示することもでき、また周囲の交通状況も確認することができる。もう一方のメッセージウインドウは現在の走行エリアや、事故が起きた時の理由(衝突、ブレーキロック等)をリアルタイムに表示する。
オペレーション画面の進化

従来はライダーの操作状況と 前面映像を合成表示。
ライダー操作状況と前面画像の他に 交通状況の判る鳥瞰地図(拡大表示可能)事故理由表示等のメッセージウインドウ。
マルチアイ
マルチアイと称している再生機能により、教習後さまざまな視点からの映像を再現できるので、効果的な指導に役立てることができる。またこのマルチアイの中には、再生一時停止中に任意の二点間の距離を計測表示する機能を追加、画面をクリックすることにより容易に計測ができる。
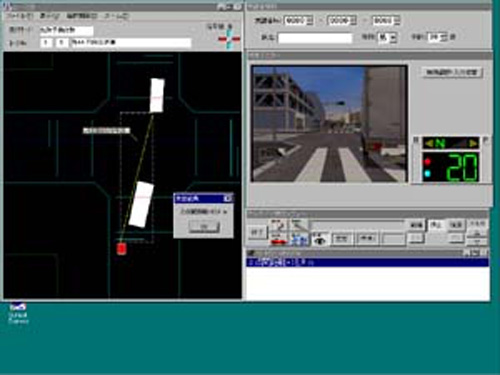
この画面は死角に入っている対向右折乗用車と自分のバイクとの距離を計測した例。
この機能は速度に応じた車間距離の必要性など、科学的に教育する上で有効な機能と考えている。




