Hondaは、これからの時代のモビリティとして、自由な移動の喜びを創造することに加え、時間や空間の制約から人を解放し、あらゆる可能性を拡張するモビリティの実現を目指しています。
その取り組みの一環として、海中という領域で、今後カーボンニュートラルに寄与すると考えられる洋上風力発電のメンテナンスなどを行うROV(Remotely Operated Vehicle:遠隔操縦無人潜水艇)に着目。より使いやすい機能とサービスの実現を目指し、研究開発を進めています。
Hondaロボティクス技術を応用したROVの開発
現在、カーボンニュートラルを推進する取り組みのひとつとして、洋上風力発電が重要かつ成長する事業として注目されています。その洋上風力発電では、施設運営のために欠かせない海中作業が困難な作業として課題となっています。
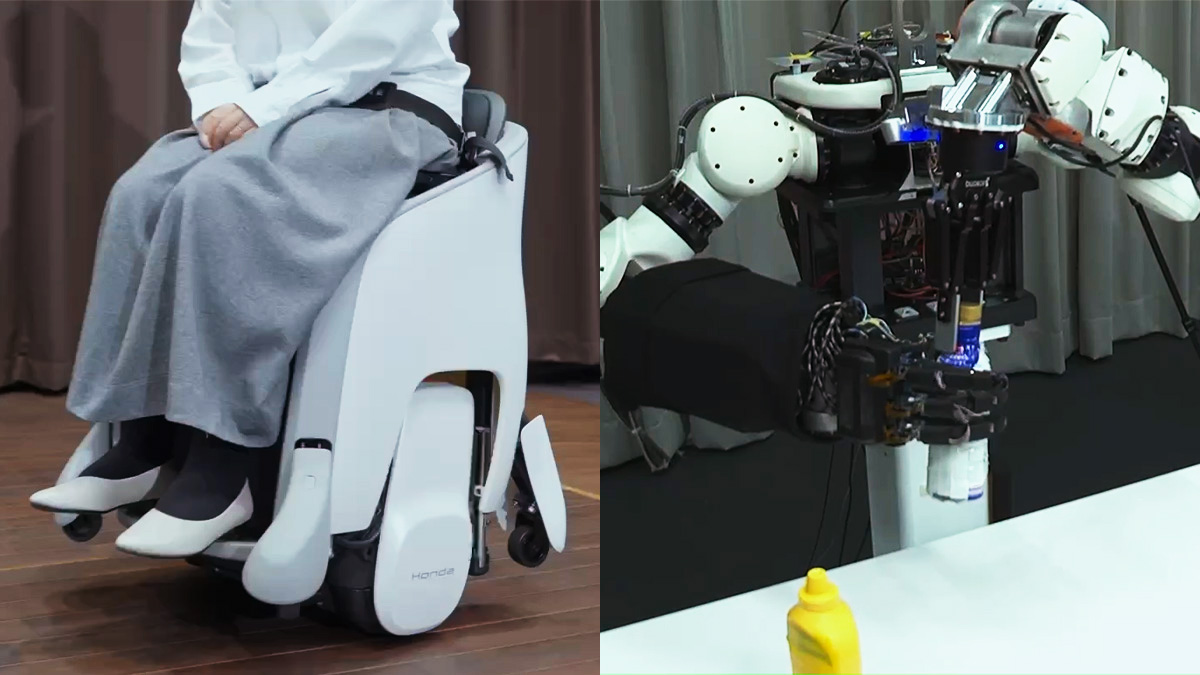
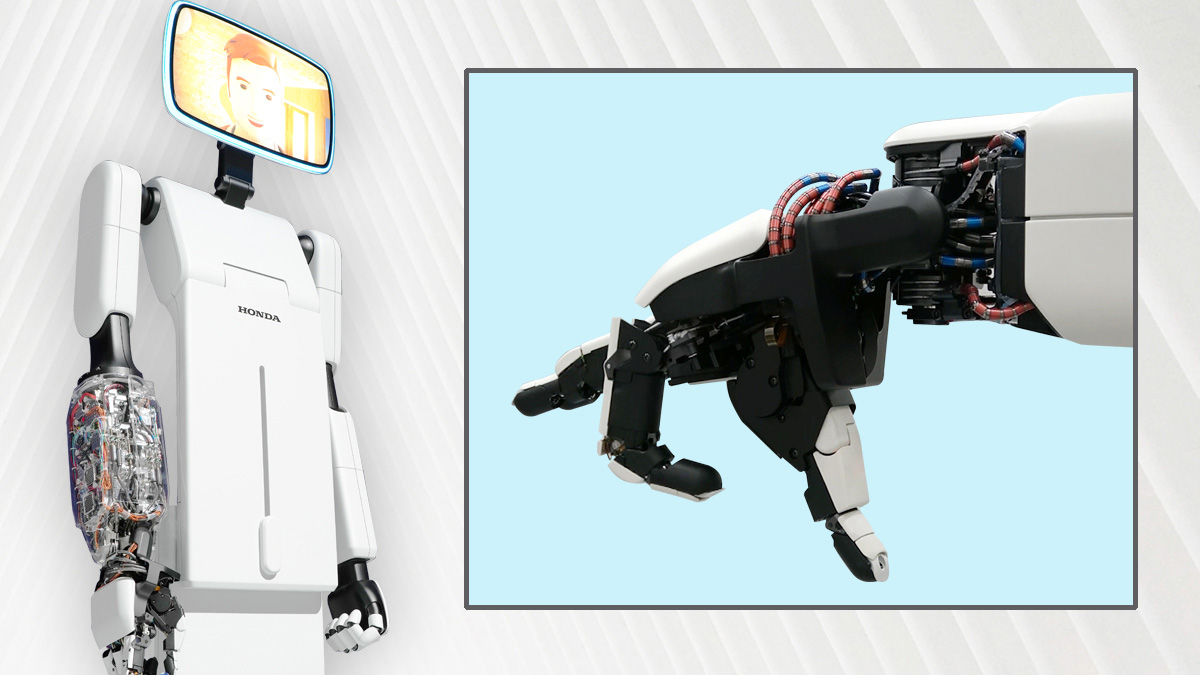
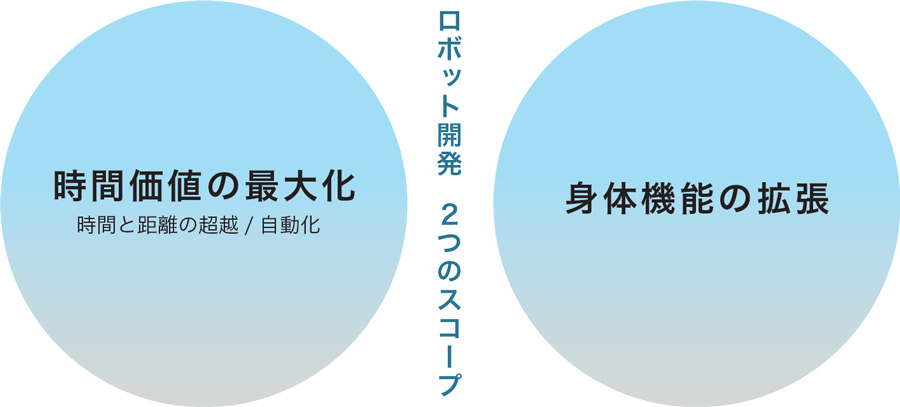
Hondaは、長年のロボティクスの研究開発において、時間と距離を超越し、持てる能力をいつでもどこでも発揮することができる「時間価値の最大化」の実現と、生身の人が活動できない環境での活動や生身ではできなかったことも可能にする「身体機能の拡張」と、2つを大きなテーマとしています。まさにそのテーマが海中作業の課題解決に当てはまると考え、Hondaのコア技術を活かせる対象として、洋上風力発電事業における、施設の運用やメンテナンスを行うROVに着目しました。
Hondaの強みを活かしたROVを開発することで、洋上風力発電の運用を効率化し、2020年代後半の国内洋上風力発電の稼働を目指し、社会のカーボンニュートラルの取り組みのなかで役立つ存在になりたいと考えています。
Honda Roboticsが目指す姿
海中作業の課題
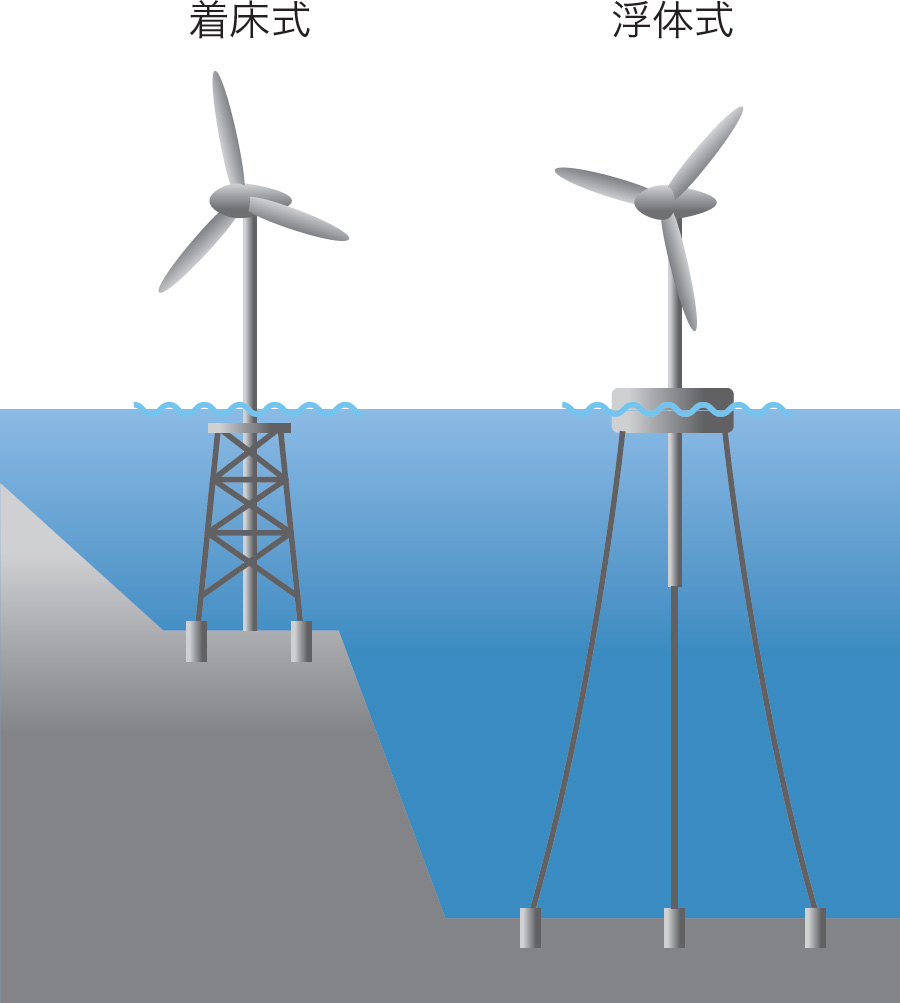
洋上風力発電は、陸上より風が強いところが多い洋上で、陸上より大型の風車が設置可能なため、より強力な発電を安定的に行えるメリットがあると注目されています。その洋上風力発電は、当初設置のしやすさから、海底に発電設備の支持構造物を埋め込む「着床式」が建設されてきました。しかし「着床式」は、浅い海でしか建設できないため、設置場所が限定的です。今後、より多くの場所に洋上風力発電を設置していくには、発電設備を浮体構造物に載せて海底に繋ぎ止める「浮体式」での運用が必須となります。
洋上風力発電の形式
一方で洋上風力発電は、海中構造物に対し定期的なメンテナンスなどが必要で、現状のROVや潜水士がその業務を行っています。しかし、潜水士はいまでも人手不足の状態で、将来、施設が増加すると対応しきれない状況であり、より深い海に設置する「浮体式」では、そもそも人では対応できなくなります。
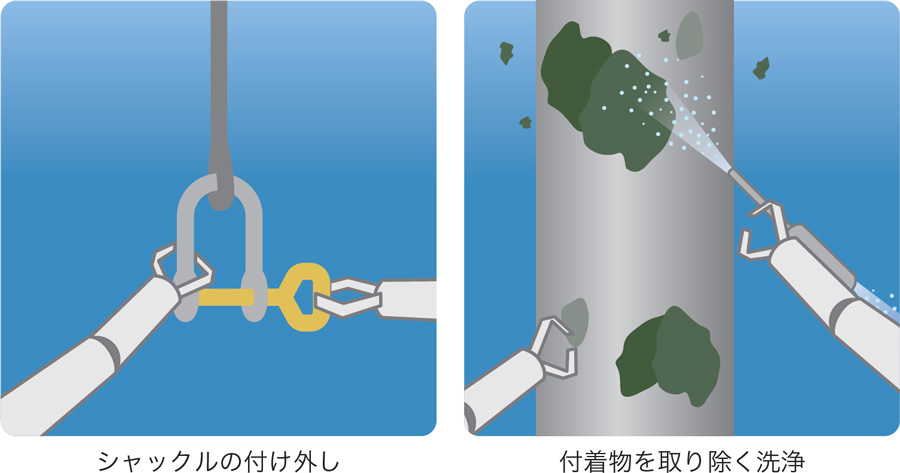
ROVが行う作業は、シャックルという留め具の付け外し、点検のために海中構造物に付着した生物を取り除く洗浄などを想定していますが、現状のROVは作業効率を向上させるべく改善の余地があることが調査の結果わかりました。
ROVが行う作業イメージ
Honda ROV コンセプトモデルの特徴と技術
システム概要

①機体とアームの協調制御で操縦を簡単にする「マニピュレーター・ROV協調制御」
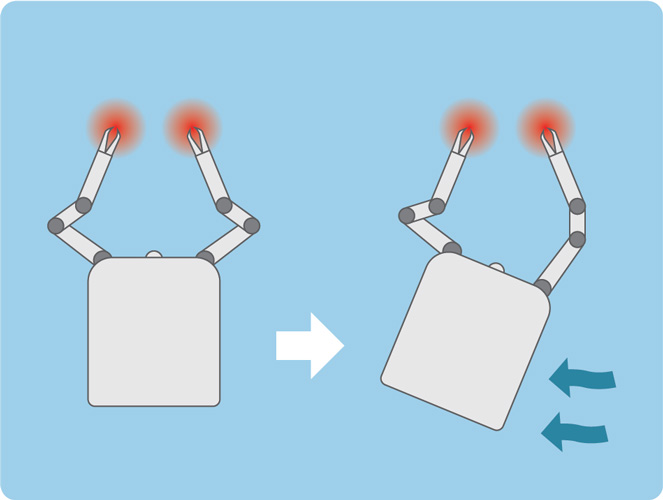
洋上風力発電のメンテナンスなどを行う現状のアーム付きROVは、機体とアームの操縦が別々という課題がありました。そのため、機体を作業対象に近づけて、次にアームを伸ばした時には対象が海流で遠ざかるなど、潮流の状況によっては高度な操縦が求められる状況でした。
そこで、Hondaは操縦性の大幅な向上を図るために、ASIMOのロボティクス技術を活かした開発を行っています。ASIMOには、人の機能を工学的に再現することで、より人間らしい動きを可能とするノウハウを蓄積していて、そのうちの一つとして、モノを掴もうとして手を伸ばすと、手の動きに追随して体が自動的に前進したり、上体を捻ったりかがめて対象物を掴むという筋肉モデルを利用した手先本体協調制御技術があります。その制御を応用し、ROVのアームと機体を統合的に制御する、「マニピュレーター・ROV協調制御」の開発を進めています。
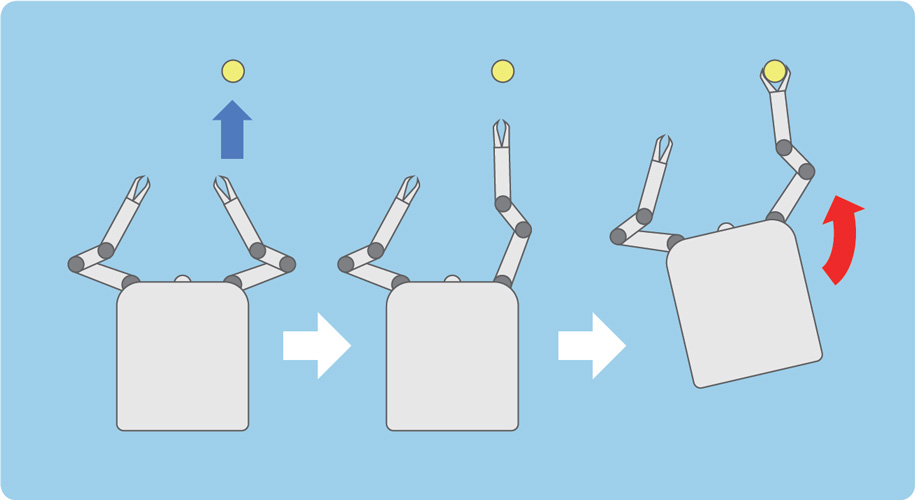
ASIMOの手先本体協調制御
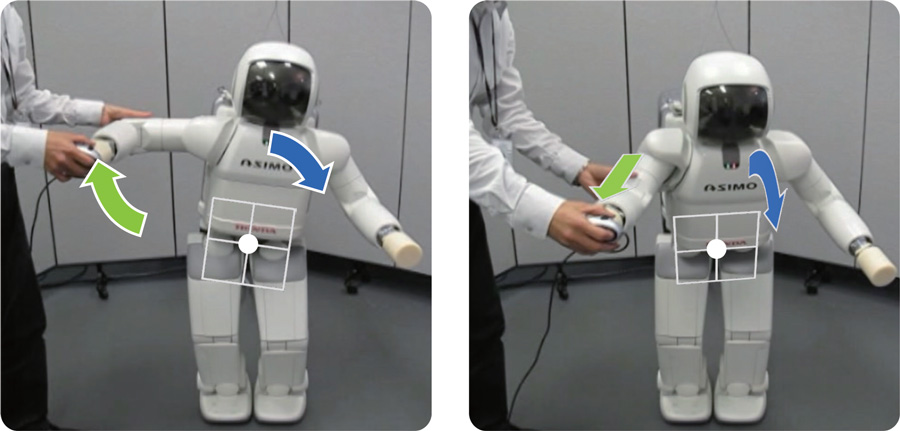
腕を外部から持ち上げたり、前に出すと、それに合わせて上体を自動で制御する
アームと機体の位置は、一定の範囲内ではアームが動いても機体の位置を動かさない「不感帯エリア」を設け、その範囲を超えてアームが伸びると機体の位置も追随するよう制御しています。機体の位置(海底に対する相対的な機体速度)は、音波のドップラー効果を利用した計測システム(DVL: Doppler Velocity Log)で、姿勢は慣性計測装置(IMU: Inertial Measurement Unit)で測定し、アームの移動に合わせて機体の位置と姿勢を自動制御します。
これによりROVは、アームを対象物に伸ばすだけで、自動で機体が前進したり姿勢を調整して目標に到達できるため、操縦がより簡単になります。
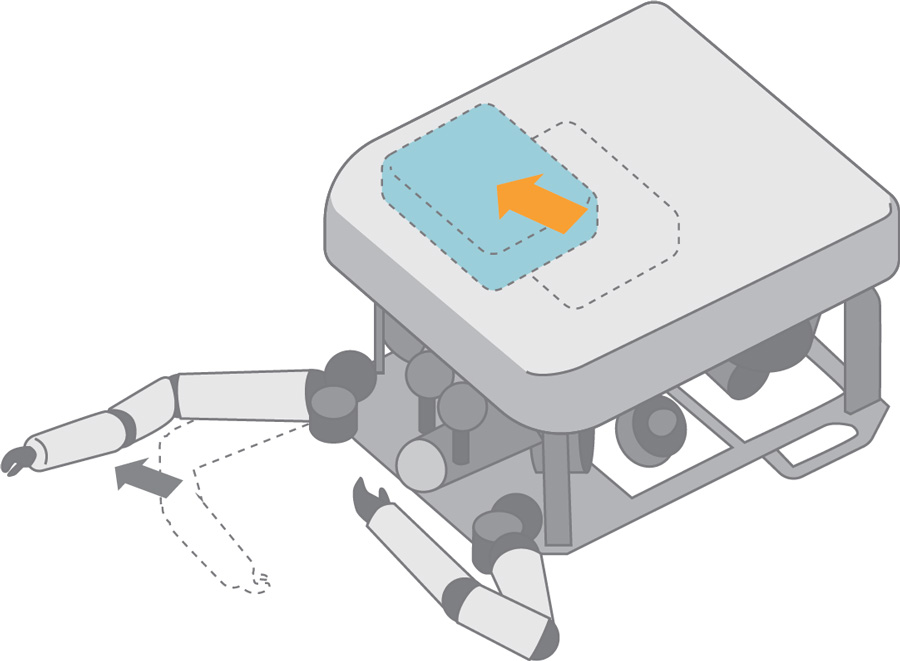
また、同様にASIMOの制御を生かし、潮流で機体が揺らいでも、アームの手先の位置を動かさないようにすることを目指しています。
これにより、付着物を取り除く洗浄において洗浄ノズルを対象物と一定の間隔を保ちながら左右に振ることができるなど、作業効率の向上の実現を目指します。
マニピュレーター・ROV協調制御の作動イメージ
アームを対象物に伸ばすだけで、自動で機体が前進
潮流で機体が揺らいでも、アームの手先の位置を動かさない
アーム作業時の映像
外部カメラの映像
機体搭載カメラの映像
②浮力材を前後左右に移動させ機体の姿勢を制御する「浮心・重心制御機構」
水中では常に機体の姿勢がゆらゆらと変化するほか、アームを動かしたときに重心が移動し機体が傾いたり、潮流であおられて機体の姿勢が乱れることもあり、常に姿勢を制御する必要があります。
現状のROVは、スラスターを常に回して立ち泳ぎの要領でホバリングし、同じくスラスターを回して姿勢を制御しています。スラスターは、回り始めてから制御力を発揮するまでに一定の時間を要すため、操縦者の意志とのずれにより操縦が難しくなったり、スラスターの流れで海底の堆積物を巻き上げ、視界が悪くなってしまう場合があります。
そこで、Hondaはスラスターによる姿勢制御だけでなく、機体上部に浮力材を設置し、浮力材の位置を前後左右に動かすことで機体の姿勢を制御する「浮心・重心制御機構」を開発しています。アームの動く量で計算した重心点の移動量や、IMUでセンシングした姿勢変化の情報と合わせて浮力材を動かすことで浮心(浮力の中心)を動かし、重心点との差異による復元力で姿勢を水平に保ったり、前屈みにするなど一定の範囲で姿勢を制御することが可能となります。これにより、スラスターを回すより省電力でレスポンスのよい姿勢制御の実現が可能となります。
また、浮力材を箱の中に入れることで、障害物に当たっても搭載部品が壊れにくい構造にしています。
浮心・重心制御機構の作動イメージ
アームの動きによる機体の姿勢変化を補正
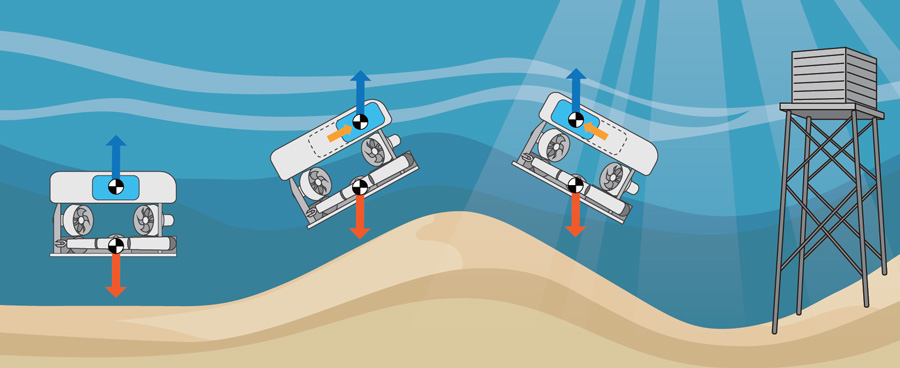
スラスターを使わずに海底の地形に合わせて姿勢を変化
浮心・重心制御機構の効果(ON/OFF動作比較)
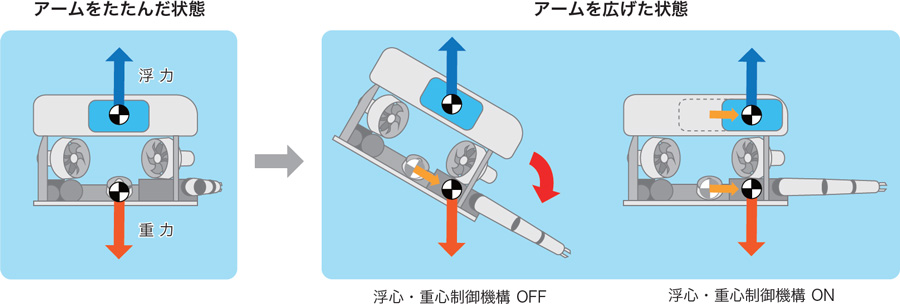
浮心・重心制御機構OFF
浮心・重心制御機構ON
③コンパクトな機体で潮流下の性能を向上する「流体抵抗低減ボディー形状」
流れの速い潮流下でも安定した作業を可能にするには、流れに逆らえるだけの動力性能と、潮流の影響を受けにくい機体が必要となります。しかし、そのためにスラスターで強力な推進力を得ようとして高出力モーターを搭載すると、機体が大きくなり多くの電力を消費してしまいます。
Hondaは、より手軽な運用を重視して、小型船に搭載できる5.5kVA程度の可搬式発電機でも十分な動力性能を得られるように、潮流の抵抗を低減する「流体抵抗低減ボディー形状」を開発しています。
四輪開発で培った空力の技術を生かし、2.0ノット※の潮流のなかでも0.5ノットで推進する航行能力や、抵抗が少なくコンパクトで姿勢が乱れにくい機体づくりを目指しています。
※ 1ノット=時速1.852キロメートル
流体抵抗低減のメカニズム
ROVは、基本的に箱型形状をしており、アームやその他の補器類が露出しているなど、流体的に抵抗が発生しやすい形状となります。
Hondaが開発しているROVは、機体上部の「浮心・重心制御機構」のボックスの形状を工夫して抵抗を低減するほか、複雑な形状の補器類を可能な限り露出させず、四方からの投影面積を低減するよう機体下部に集中的に配置しています。
流体シミュレーション結果イメージ
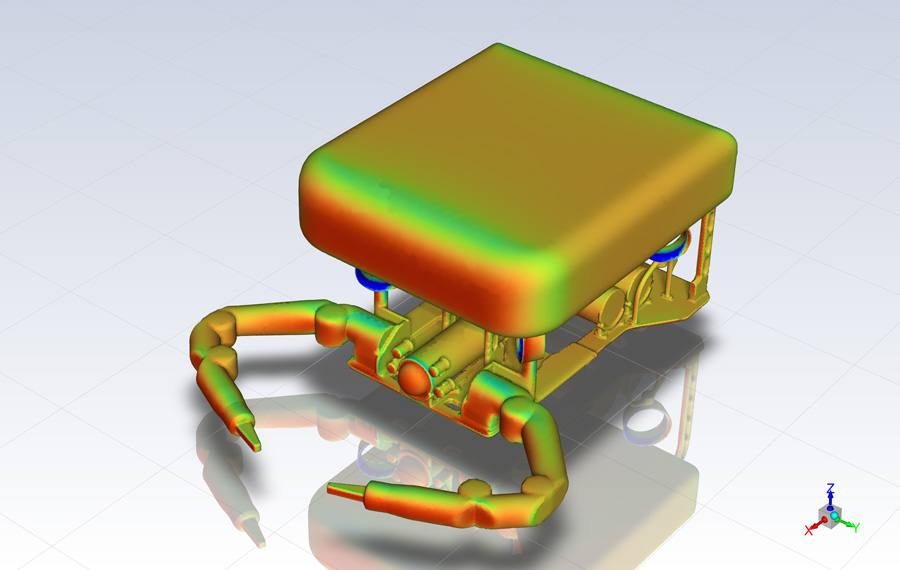
水中前進時に機体にかかる圧力。色が赤いほど圧力が高い
海洋環境シミュレーション水槽でのテスト
※撮影協力 株式会社西日本流体技研