Hondaは、「技術は人のために」という創業以来の企業精神のもと、ロボットにおいても、人に寄り添い、人の役に立ち、生活の質を向上させ、人の可能性を拡大することをめざして研究開発を続けています。人とロボットが物理的に同じ空間に存在するだけでなく、心理的にも共存できること。人を中心として機能を考えること。こうした理念に基づき、これまでにASIMOやUNI-CUB、歩行アシストなど数々の製品を開発してきました。
これからは個別の機能を持つさまざまなロボットとして研究開発することで、より早く具現化して世の中に価値を提供していきます。その取り組みの一つとして、Hondaアバターロボットは「時間価値の最大化」と「身体機能の拡張」をスコープとして定め、研究開発をしています。
Hondaアバターロボットとは
「時」と「場所」を超え人の分身として。
アバター。日本語でいうと「分身」。どれだけ離れていても、どんな場所でも、どんな人でもその場でやりたいことができる。そんな社会を創造するために。
人の環境に合わせて働けるロボットを。
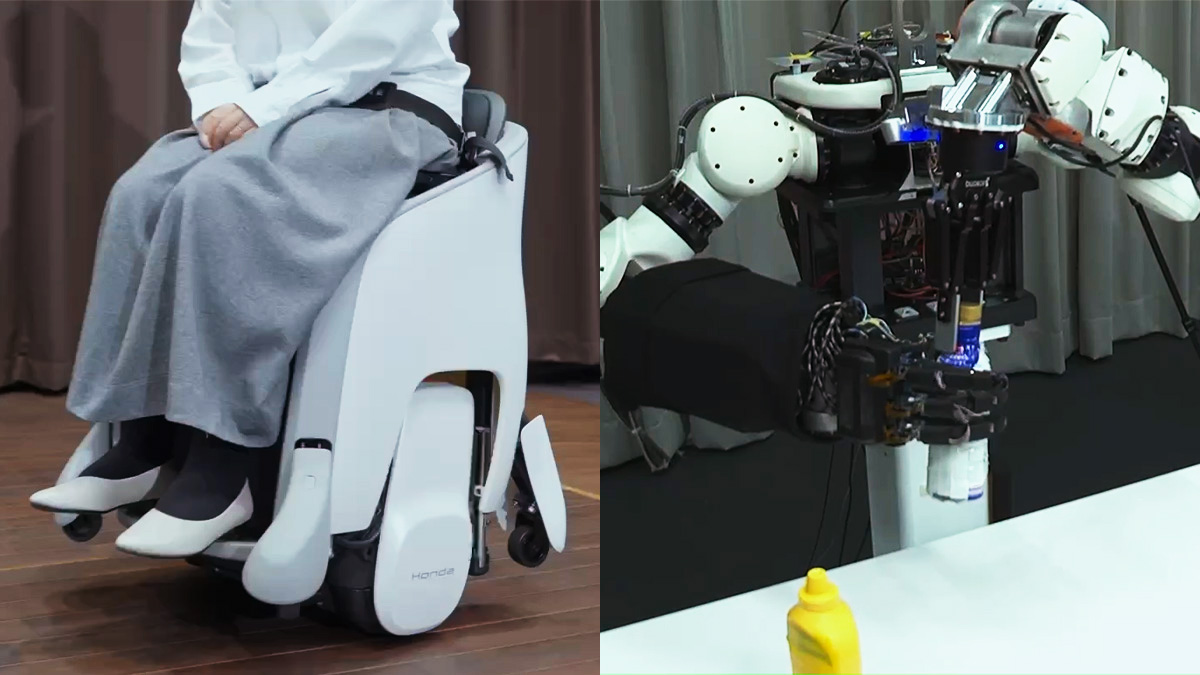
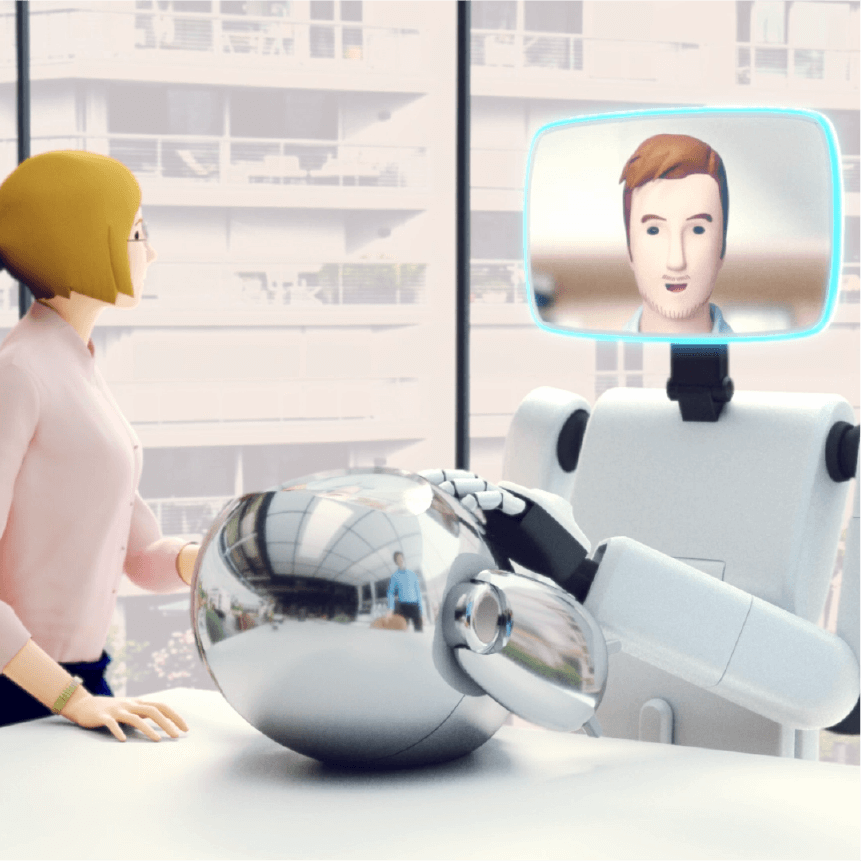
今では遠隔地のロボットを移動させながら映像を見ることができる世の中になってきました。そこから一歩進んで、めざす社会の実現に向けた最後のピースは、あたかもその場にいるかのように「ものを扱えること」です。そこでHondaは、人のために作られた道具を使い、人が直感的に操作できる多指ハンド、Hondaアバターロボットを研究開発。どれだけ離れていても、どんな場所でも、そして誰でもその場でやりたいことが行えることで、自由なライフスタイルや自己実現が可能な社会に貢献したいと考えています。
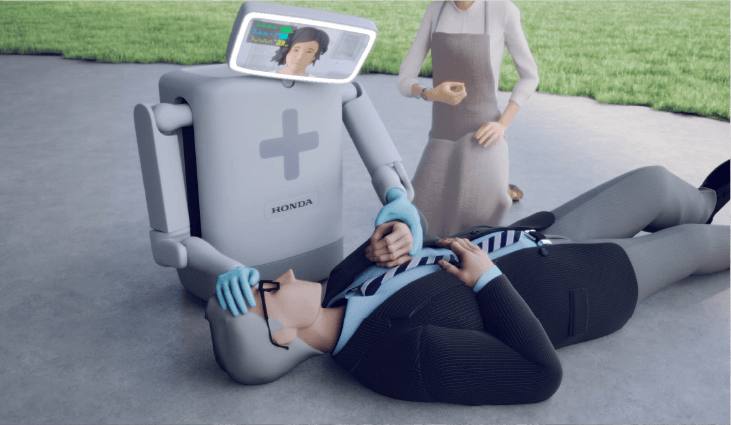
Hondaアバターロボットは、人が人らしく生き、創造性を発揮するための自由時間を生み出せることや、人が生身では活動できない環境でも活動できることで、活用シーンは大きく拡がります。例えば、遠隔地でも移動時間が必要なく高い専門性を発揮できるため、救命救急などの医療分野や、各種機器のメンテナンス・故障対応など緊急性の高い領域への活用が考えられます。また、人が立ち入りにくい環境でも活動できることで、災害現場など危険を伴う環境や、宇宙など人が活動できない環境でも作業が行えます。

Hondaの強み
ASIMOで培った技術を磨き、先駆ける。
「ロボットのいる生活」を提示したASIMOの技術。
それを継承しながら、最新の技術を注ぎ込み、さらに先へ行く。
そこには、誰も経験したことがない世界が待っています。
コアとなる技術開発を
それぞれのプロフェッショナルで。
ASIMOの開発では、人とすれ違ったり、ぶつかっても倒れないなどの「人と同じ空間で移動する」機能、「手を使って作業する」機能、人の発話内容を理解したり、人の意図をくみ取って動きを制御するなどの「人とのインタラクション」機能を実現してきました。Hondaアバターロボットには、ハードウェアである多指ハンドに加えて、そのハンドを意のままに操作するための制御やAIといったソフトウェアも含めたさまざまな技術開発が必要となってきます。その点、HondaにはASIMO開発から継続してきたロボット技術の蓄積があり、メカ機構設計、制御、AIなどのプロフェッショナルが揃っています。また、ものづくりの会社なので試作部門の能力が高く、アイデアを形にするまでのスピードも大きな強みとなっています。
技術紹介「多指ハンド」
「めざしたのは「人の手」。
ライバルは、人の手です。遠くはなれていても、その場にいるかのように直感的に、高精度な「作業」が可能な多指ハンドを。
人の手と遜色ない繊細さと力強さの両立を。
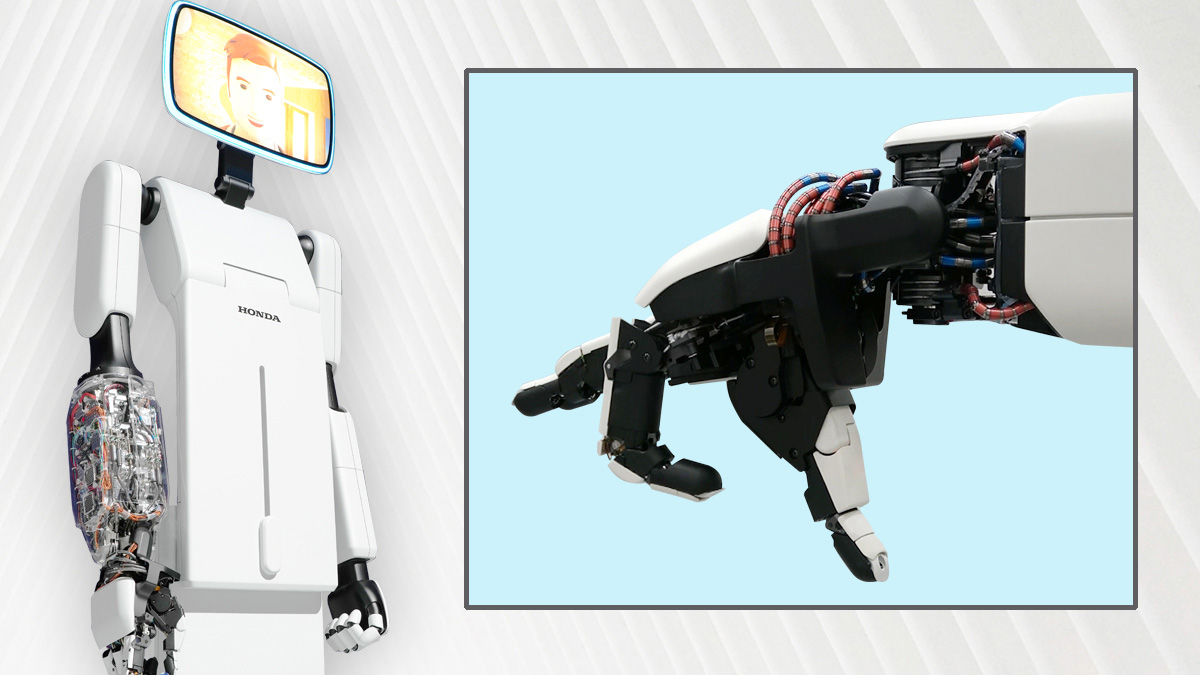
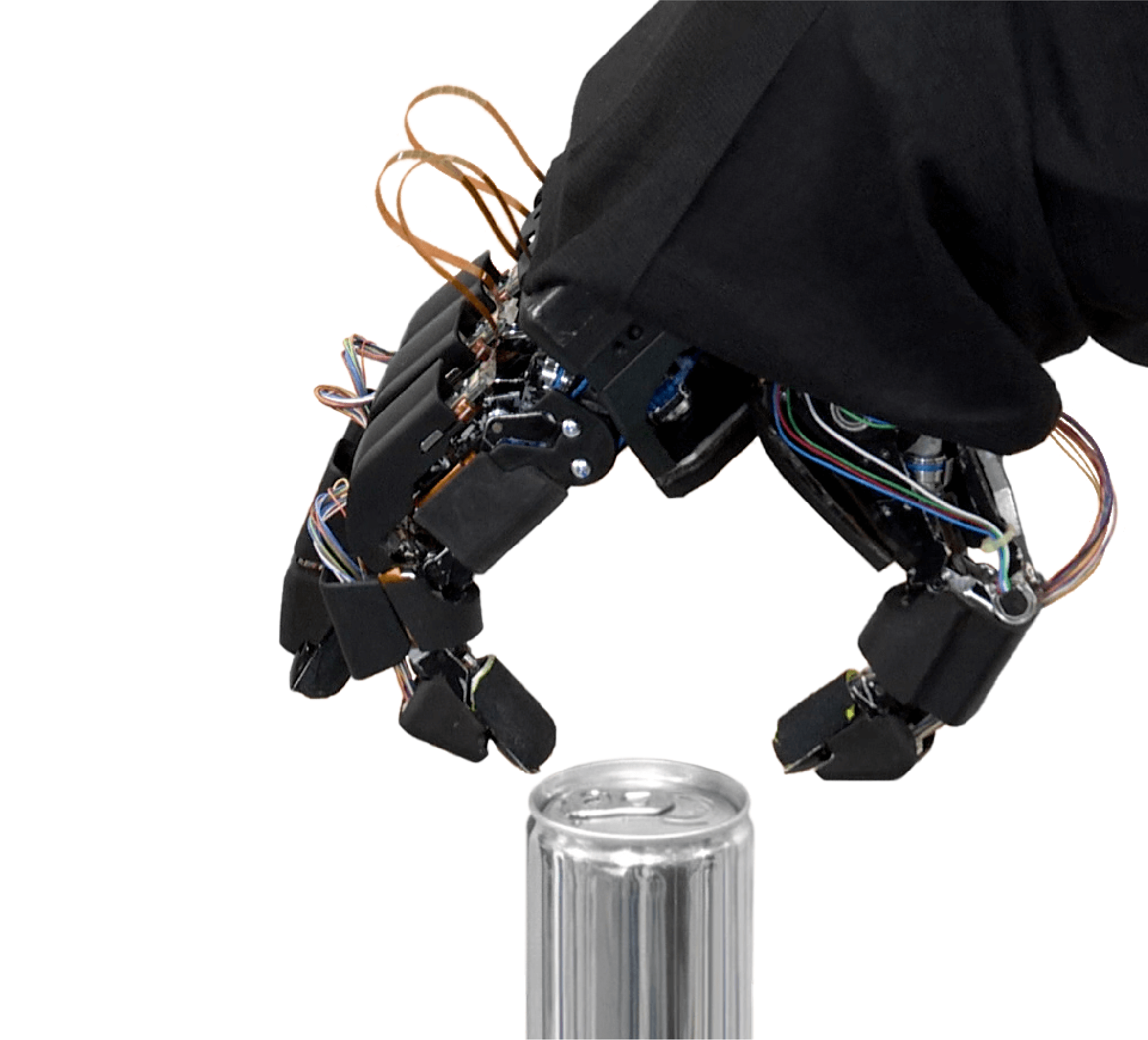
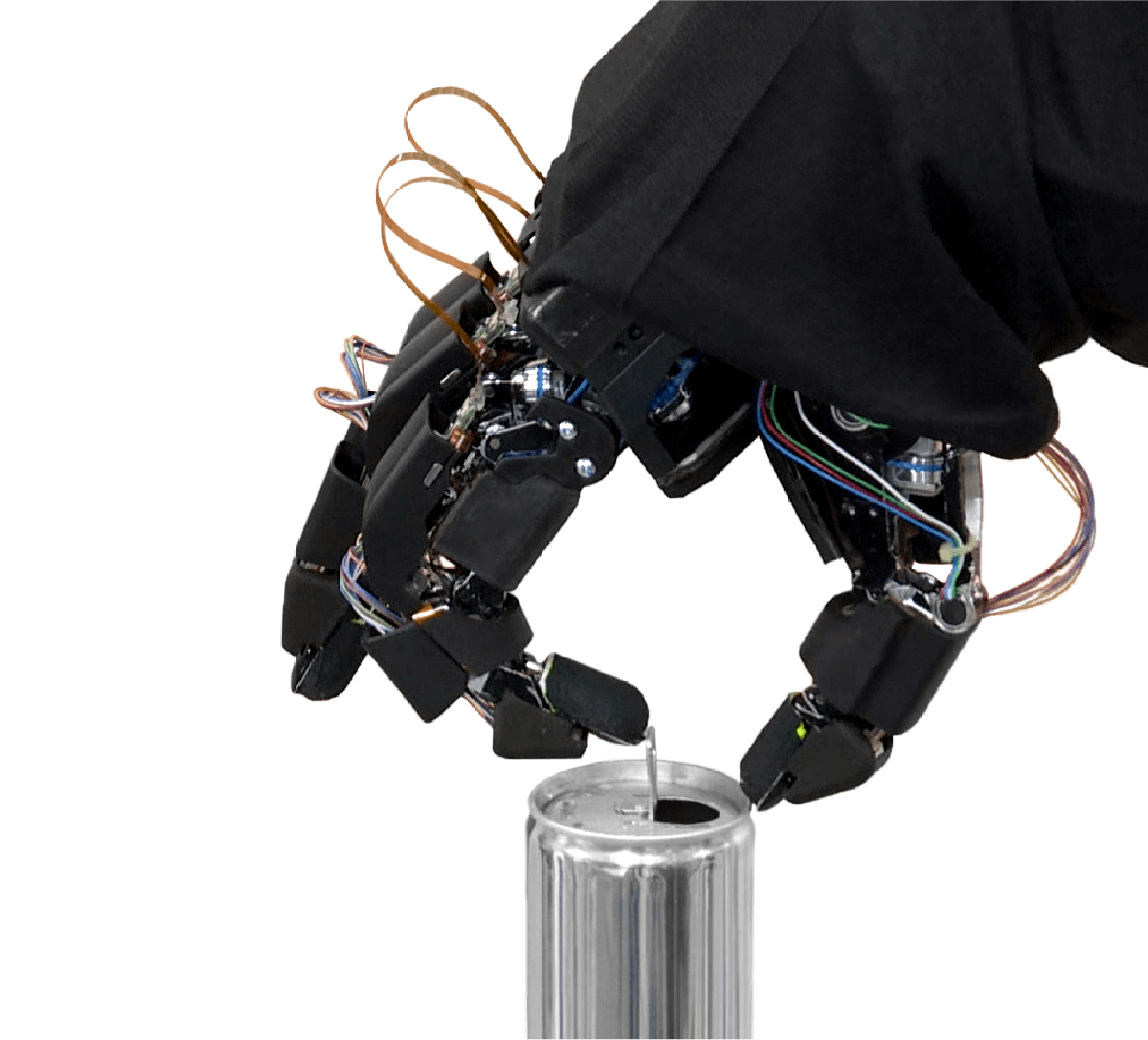
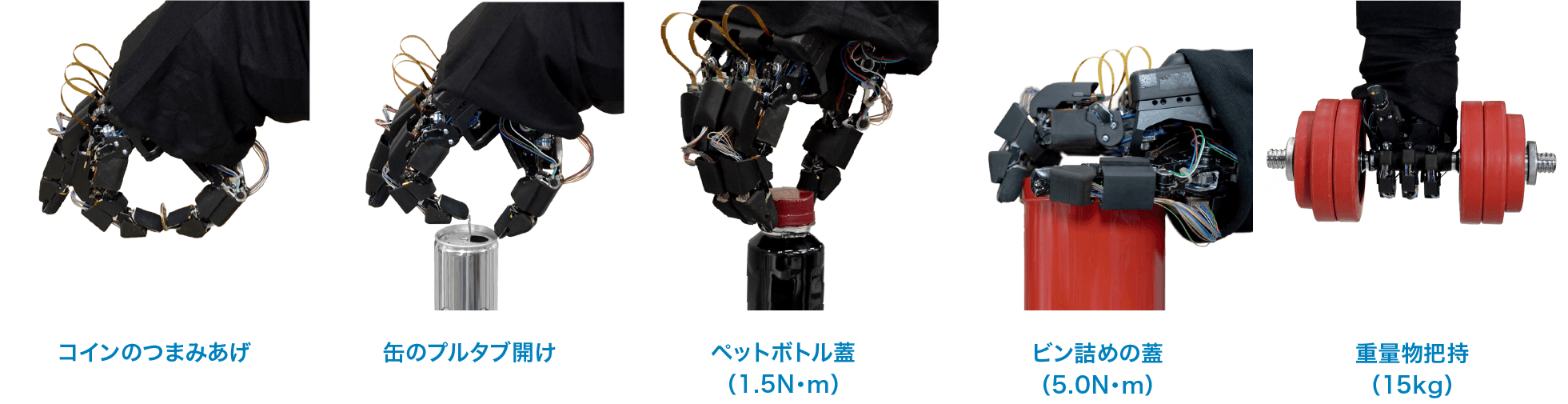
人の手は小さなものをつまむ繊細さと、がっちり握る力強さを合わせ持っています。一方で、小柄な体格のASIMOの手を含め現状の多指ハンドは、人間並みの能力を持っているとはいえません。Hondaはこの課題に対し、メカ機構の駆動システムの工夫や緻密な制御によって、人の手に迫る、繊細さと力強さを獲得。小さなコインを指先で器用につまみ上げたり、缶のプルタブやペットボトルの蓋を開けられたり、日常生活における多指ハンドの作業可能範囲を拡げました。
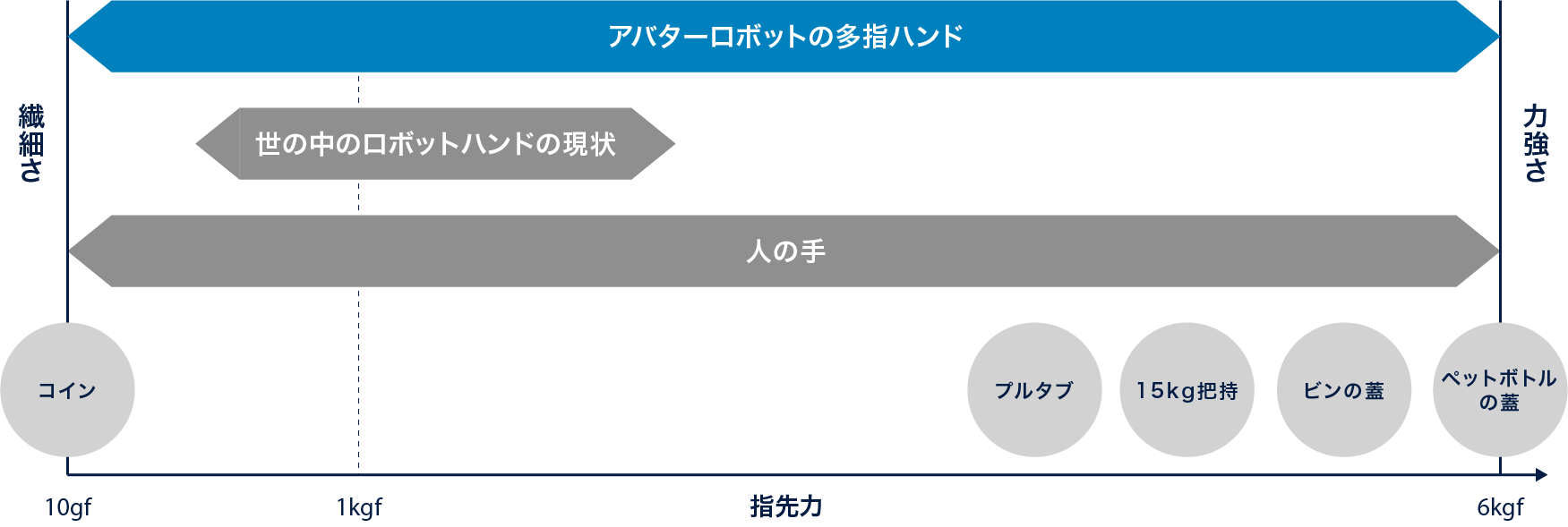
ASIMOは胴体に内蔵した油圧アクチュエーターでハンドを駆動していました。Hondaアバターロボットでは、胴体ではなく肘から先の前腕部分に構成要素を集約しながら、強い力を出すためにワイヤー駆動を採用。クレーンなどにも使われる動滑車の仕組みを応用し、立体的な機構にして指の中に組み込みました。これにより、前腕部分に構成要素をコンパクトに内蔵しながら、指先力がASIMOに対して5倍以上まで飛躍的に高められています。
ワイヤー駆動方式はモーターからギアなどを介して直接駆動する方式に対して、ワイヤーの伸びによって正確なコントロールが難しくなります。この課題に対しては、ワイヤーの張りを測定する張力センサーや指の曲げ角度などの情報を利用して弾性や摩擦の影響を補正。正確にコントロールすることを可能にしています。また、回路系においても基板を機能ごとに分割するなどコンパクト化を追求しています。
力強さと繊細さを両立させるためには、ハンドの指を駆動するモーターも重要になります。例えばビン詰めのフタを開ける動作などでは強い力で把持し続ける必要があり、そうした使い方に適した、強い力を連続して出せるモーターを開発しました。ASIMOの開発においても重量あたりの出力密度の高いモーターを研究しており、その知見を活かしてコンパクトながら高出力なモーターを実現しています。前腕部分に11個のモーターを内蔵し、ワイヤーを介して4本の指、合計16関節を動かし、人の日常生活における手の形の大部分をカバー。さまざまな作業に対応できます。
※数値はすべてHonda測定値。
技術紹介「AIサポート遠隔操縦」
その手は、考え、成長する。
多指ハンドだけでは、なかなかうまくいかない操作者の意図を推定して、手の動きを補正する「AIサポート遠隔操縦」。違和感のない操作性には欠かせない技術です。
「遠隔操縦」という難題への挑戦。
人がなにげなく行っている把持動作は、複雑なプロセスを経て行われています。まず、どの対象物をどのような手の形で持つかを計画し、手を伸ばして把持、しっかりと持てているかを確認してずれていれば修正動作をするというように。一方でロボットハンドの遠隔操縦で同様のことを行おうとすると、おおよその手の形は作れるものの、カメラ映像を介すと距離感が掴みづらい点や、触った状態が操作者にわからない点が課題となり、感覚とのずれが生じます。Hondaはこの課題に対して遠隔操作の難しい部分をAIでサポートして、スムーズな把持を実現する「AIサポート遠隔操縦」を研究開発しています。
操作者の意図を推定する。
ASIMOは、周囲の人の動きなどを複数のセンサーからの情報をもとに認識し、人の操作の介在なしに自ら次の行動を判断する自律行動を実現していました。Hondaアバターロボットでは、認識をして行動を決めるのは人間(操作者)が行い、操作者が何を行おうとしているのかという意図を推定し、多指ハンドを操作者の意図通りに補正制御する部分をAIサポートが担います。AIサポートは、ASIMOの自律技術をベースに最新のAI技術を取り入れながら精度を磨き上げています。
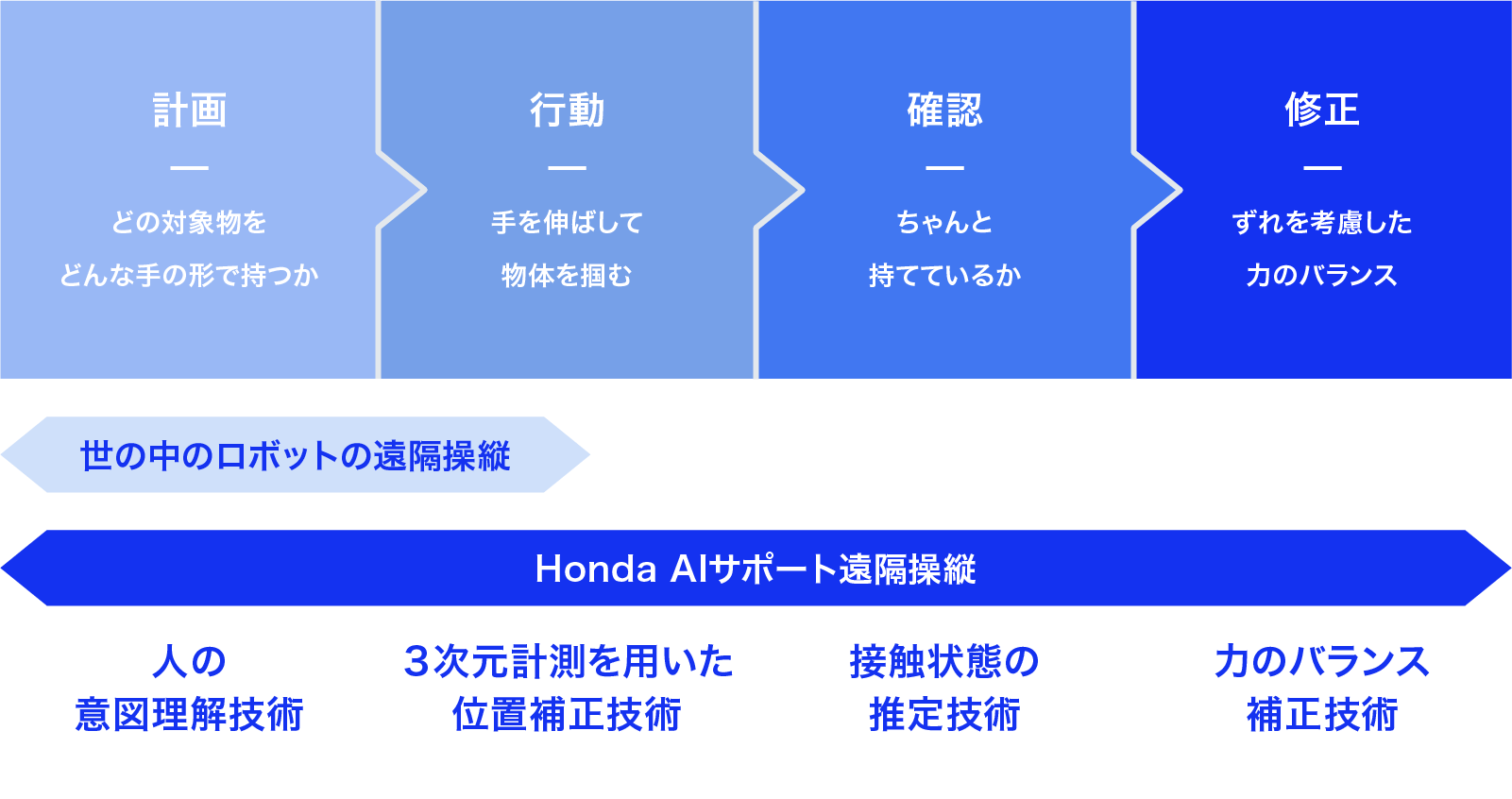
AIサポートはアバターロボットに備えられた各種センサー、操作者が装着するゴーグルおよびグローブからの多次元情報をもとに操作者の意図を推定し、位置やバランスを補正してスムーズな把持を実現します。
- <AIサポートによる意図推定・動作補正の流れ>
-
- 計画:操作者の視線の向きや手の動きから、どの対象物をどのような手の形で持とうとしているのか意図理解技術で推定
- 行動:距離感が掴みづらい課題に対して、3次元計測を用いた位置補正技術で、操作者の感覚に合うように多指ハンドの位置や角度を調整
- 確認:指先の6軸力センサーおよび手の表面の接触センサーからの情報、カメラの情報から接触状態を推定し、しっかり把持できているか確認
- 修正:必要に応じて力のバランスを補正。操作者のグローブには振動でフィードバック
AIは、学習し、習得を続ける。
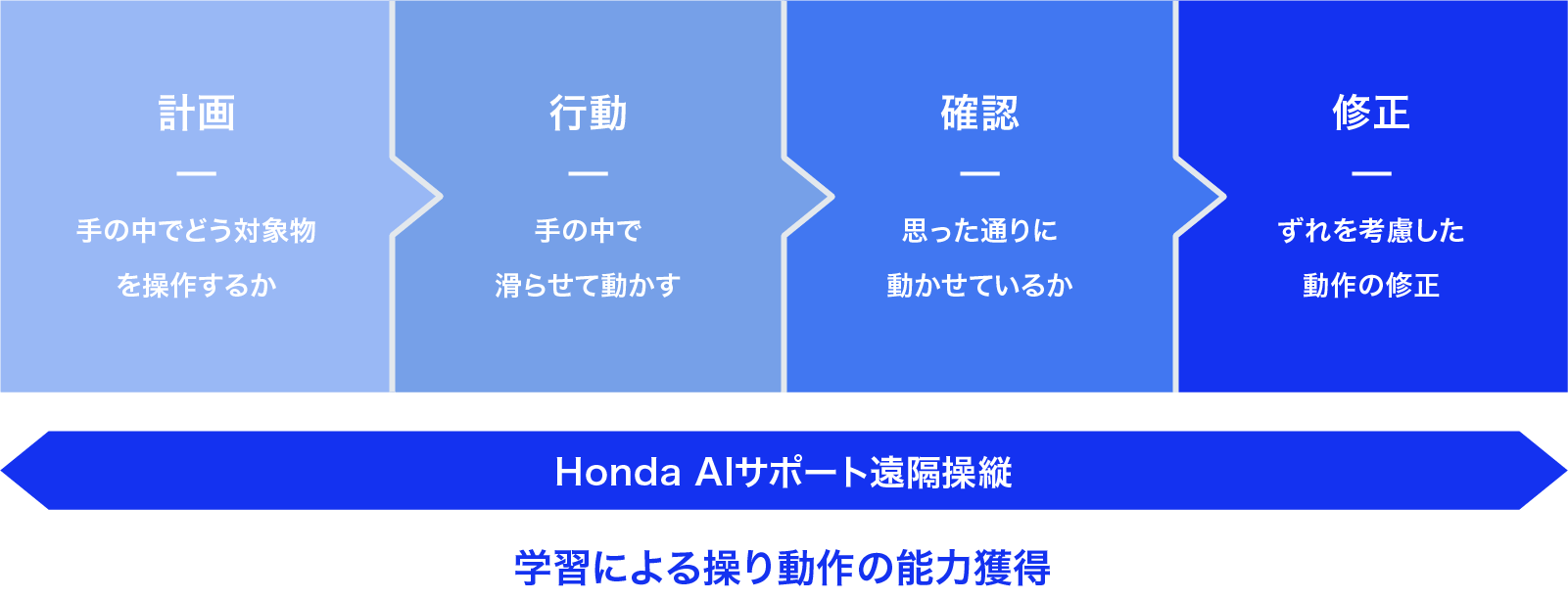
把持だけではなく、道具を掴んだ後に手の中で滑らせながら持ち替えを行う高度な動作にも取り組んでいます。Hondaアバターロボットが失敗を繰り返しながら学習し、一つひとつの動きを習得。すでにドライバーを持ち替える動作ができるようになりました。道具を持ち替える際に、ある指の力を抜いて別の指の力を入れたり、力をかける向きを変えたりといったことは、人にはたやすくできることでもロボットには非常に繊細で難しい動作です。それを可能にしたのは、高い能力を持つハードウェアと、その能力を最大限に引き出すAI技術。Hondaは両方の技術を持つ強みを活かし、さまざまな作業に対応させるべく進化を続けていきます。
人の可能性を拡げるロボットに、こだわる。
Hondaはモビリティーカンパニーだからこそ、バーチャルな世界にとどまらずにリアルな体験にこだわりたい。そのために、クルマやバイク、航空機といったモビリティーに加え、時間・空間・能力の制約を超えてリアルな活動が行え、人が能力を発揮できるHondaアバターロボットを提供していきたいと考えています。それによって、意志を持った人が、やりたいことを叶えられるような世界を描いています。
Hondaはこれからも、人に寄り添い、人の役に立つロボット開発を追求し、技術を進化させていきます。
Hondaアバターロボット開発チーム
-
株式会社 本田技術研究所
先進技術研究所 フロンティアロボティクス
アバターロボット 開発責任者
杉山 謙一郎
-
株式会社 本田技術研究所
先進技術研究所 フロンティアロボティクス
アバターロボット 制御領域担当
川上 智弘
-
株式会社 本田技術研究所
先進技術研究所 フロンティアロボティクス
アバターロボット 機構設計領域担当
竹村 佳也
-
株式会社 本田技術研究所
先進技術研究所 フロンティアロボティクス
アバターロボット AI領域担当
林 昭伸