![3モーターハイブリッドシステム SPORT HYBRID SH-AWD®[レジェンド]のテクノロジー 2014年](images/main.jpg)
Hondaは四輪車の生産を開始して以来、ドライバーが「意のまま」と感じられる走りを目指して技術開発を続け、時代に合わせて最適なシステムを選択し実用化してきた。1987年のホンダ4WS、1996年のATTS、2000年のVGSに続き、2004年には前後輪と後輪左右の駆動力を自在に制御する世界初の四輪駆動力自在制御システム、SH-AWD(Super Handling – All Wheel Drive)を開発し、4代目レジェンドに適用した。
SH-AWDは駆動力を走るためだけでなく曲がる性能にも活用することで、クルマの運動性能を高めるシステムである。駆動力に左右差を設けるトルクベクタリングを行い、加速しながら旋回しているときに外側輪に内側輪より大きな駆動力をかけ、重心点まわりにヨーモーメントを発生させ、旋回を助ける効果を生む技術だ。
そのSH-AWDはエンジンからトランスファーを介してリヤドライブユニットを駆動する構造のため、トルクベクタリングの効果はエンジンが充分なトルクを発生する旋回加速時に限られており、常用シーンでの効果は限定的だった。
Hondaは2012年に開催したメディア向け技術イベントの「Honda Meeting 2012」で初めて3モーターハイブリッドシステムのSPORT HYBRID SH-AWDシステムを公開。1モーターハイブリッドのi-DCD(フィットに適用)、2モーターハイブリッドのi-MMD(アコードに適用)とともにSPORT HYBRIDのフォーメーションを組み、用途に応じてハイブリッドシステムを使い分ける戦略だった。
SPORT HYBRID SH-AWD は2014年11月10日に発表した5代目レジェンドに適用。2016年には、新たな走りの喜びをもたらす技術として、ミッドシップレイアウトの2代目NSXに応用した形で搭載されることになる。
レジェンドのSPORT HYBRID SH-AWD はリヤに2基のモーターを搭載することで、フロントに搭載するエンジンが発生する駆動力の大小にかかわらず、高い応答性で後輪左右のトルクベクタリングを行うことが可能になった。そのため、SH-AWDでは限定的だったトルクベクタリングの効果を拡大し、常用シーンにおいても効果を発揮。安心して思いどおりによく曲がる、意のままの走りの領域を大きく拡大できるようになった。
SPORT HYBRID SH-AWDシステム構成図(写真はレジェンド)
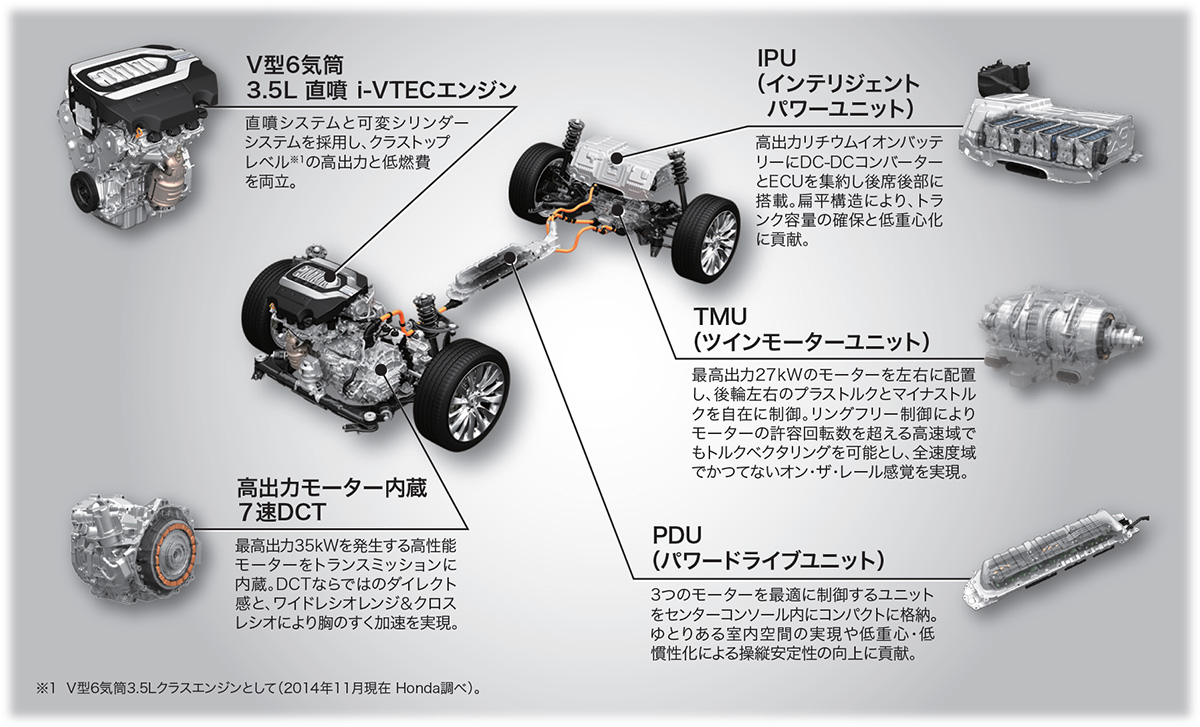
SPORT HYBRID SH-AWDのシステム構成と配置は下記のとおりである。
● 3.5L・V型6気筒直噴i-VTECエンジンをフロントに搭載し、高出力モーター(最高出力35kW/3000rpm、最大トルク148Nm/500-2000rpm)を内蔵した7速デュアルクラッチトランスミッションを組み合わせる
● 中央部センターコンソール内に各モーターを最適に制御するパワードライブユニット(PDU)を搭載
● リアに高出力リチウムイオンバッテリーを内蔵したインテリジェントパワーユニット(IPU)を搭載
● リアサブフレーム内に後輪左右のトルクベクタリングを可能とするツインモーターユニット(TMU)を搭載
リアサブフレーム内に収納するためコンパクトに設計したツインモーターユニットは、回転時のトルク変動(トルクリップル)を大幅に低減した2基の新開発モーターとプラネタリー減速機構、ワンウェイクラッチ、ブレーキで構成する。新開発モーターはコンパクトなサイズとしながら、高性能マグネットや高効率電磁鋼板の採用により、高出力・高トルク(1基あたり最高出力27kW/4000rpm、最大トルク73Nm/0-2000rpm)を実現した。
ツインモーターユニットのシステム構成図
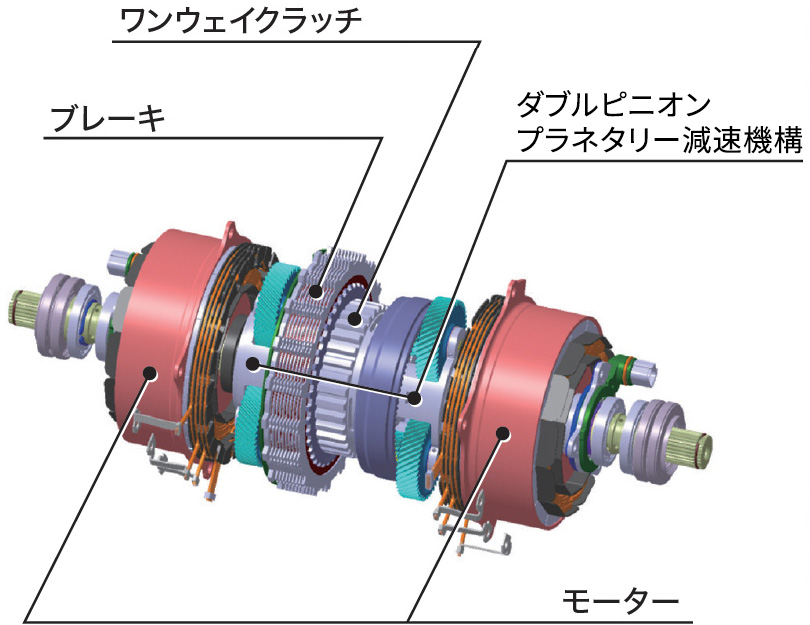
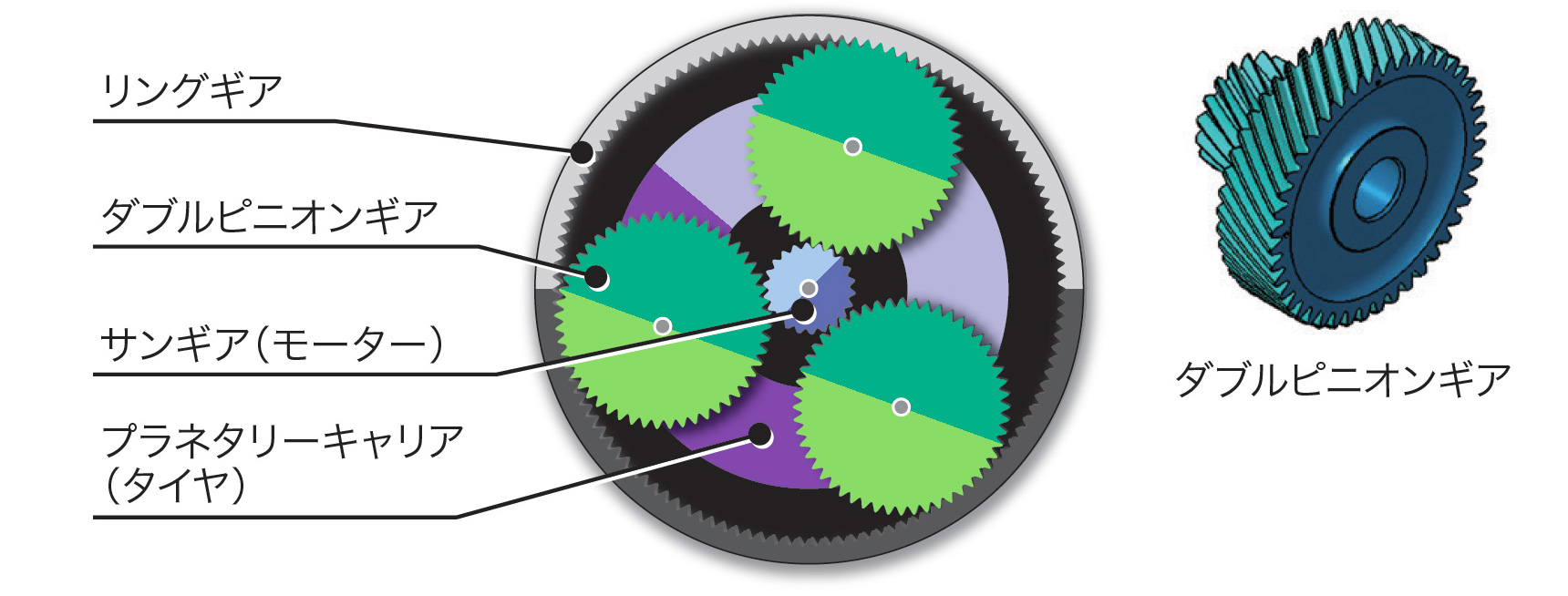
モーターの内側に配置されたプラネタリーギアによる減速機構は、モーターシャフトに直結されたサンギア、サンギアと噛み合う3つのダブルピニオンギア、ダブルピニオンギアを支持するプラネタリーキャリア、そして外側のリングギアで構成。モーターの回転を約10分の1に減速すると同時に、トルクを約10倍に増幅してタイヤを駆動する。
ブレーキはリングギアを固定/解除するのに用いる。また、ワンウェイクラッチはプラネタリー減速機構のリングギアにかかる反力を駆動方向のみに規制し、ブレーキ負荷を低減するのに用いる(そのことで省電力化に寄与)。
トルク伝達の仕組みは以下のとおりである。
1. モーターがサンギヤを回転させる
2. サンギヤがダブルピニオンギアを回転させる
3. リングギアは固定されているため、ダブルピニオンギアがプラネタリーキャリアを回転させる
4. プラネタリーキャリアがアクスルシャフトとドライブシャフトを介してタイヤを駆動
プラネタリー減速機構構造図
ツインモーターユニット作動動画
ツインモーターユニットはリングギアをブレーキで固定することで、モーターのトルクを効率良くドライブシャフトに伝達する。一方で、リングギアを固定した状態ではモーターの回転数とタイヤの回転数が比例関係にあるため、高速域ではモーターが許容回転数を超えてしまう恐れがある。そこで、高回転域ではブレーキを解除してリングギアをフリー(回転可能)な状態とし、タイヤの回転の影響を受けずに自転させることでモーターを保護する。
ツインモーターユニットの2基のモーターは、エンジントルクや前輪駆動力に依存せず、後輪左右の駆動力を独立して制御することが可能。また、減速回生時のモーター抵抗を制御することで、減速時のトルクベクタリングも可能だ。さらに、外側輪はプラスのトルク、内側輪はマイナスのトルクとすることで、従来のSH-AWD以上に大きな内向きのヨーモーメント発生させることができる。
トルクベクタリング イメージ図
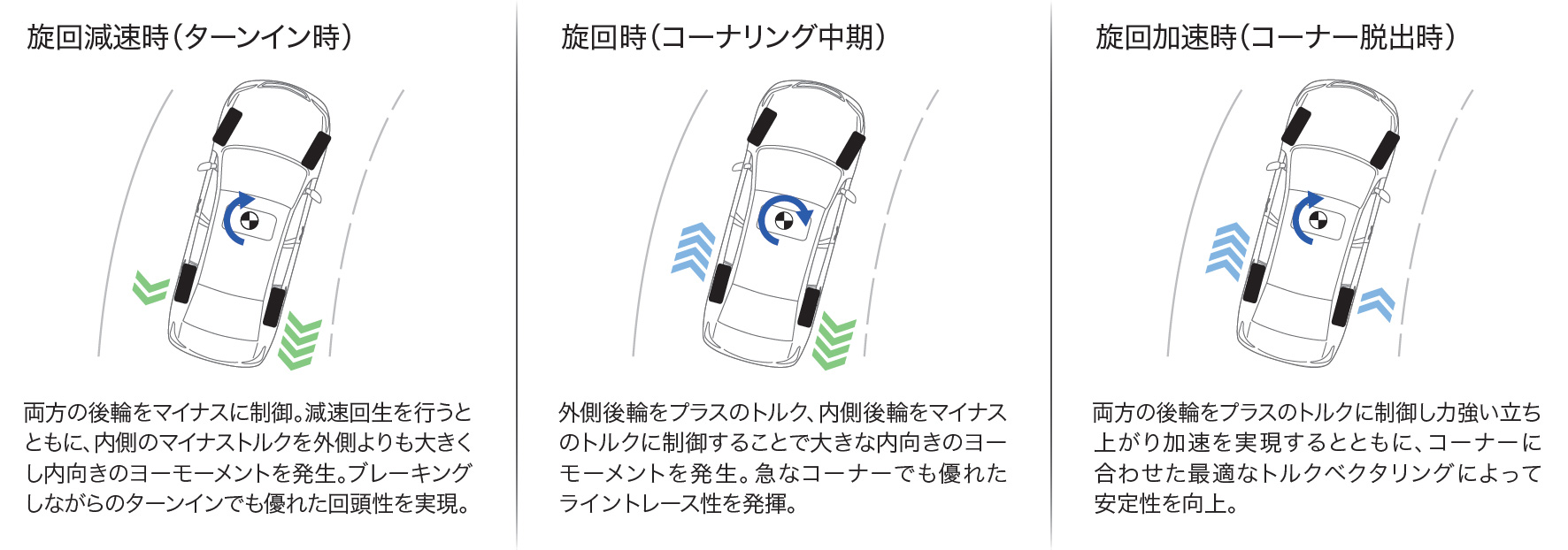
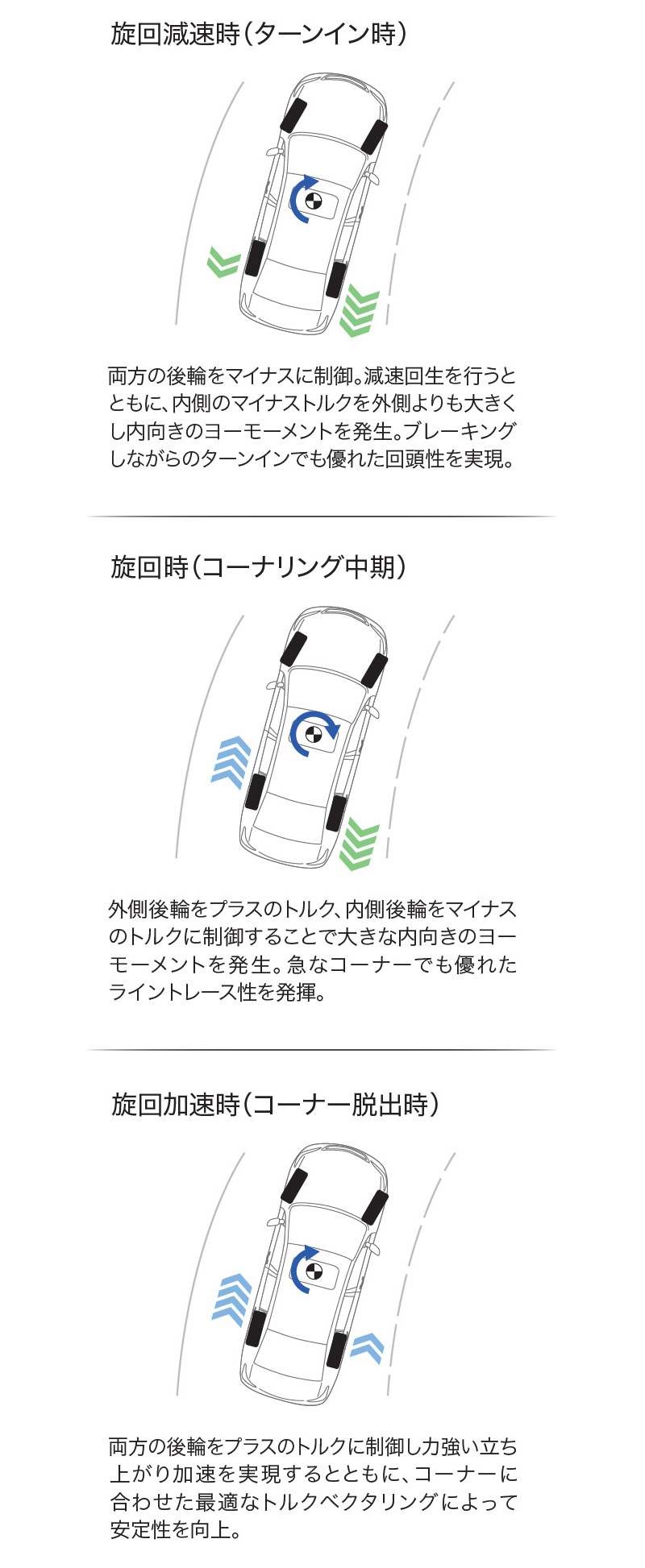
コーナーに向けてブレーキングからターンインし、脱出していくシーンでは、ターンイン時(減速旋回時)に後輪左右ともにマイナス(減速回生側)に制御。内側輪のマイナストルクを外側輪よりも大きくすることで、内向きのヨーモーメントを発生させ、ブレーキングしながらのターンインで優れた回頭性を実現する。
コーナリング中期では、外側後輪をプラスのトルク、内側後輪をマイナスのトルクに制御することで、大きな内向きのヨーモーメントを発生。急なコーナーでも優れたライントレース性を発揮する。
そしてコーナー脱出時は、後輪左右ともプラスのトルクに制御し、力強い加速を実現。内側輪よりも外側輪に大きなトルクをかける制御を基本に、コーナーに合わせた最適なトルクを配分することで、安定性を向上させる。
2004年の4代目レジェンドに適用したSH-AWDはエンジンの駆動力を前後かつ後輪左右に配分するシステムのため、加速旋回時のライントレース性を高め、四輪でしっかり曲がる感覚を提供することに効果を発揮した。そのため、とくに大きな効果が感じられる訴求シーンは主に郊外のワインディング路だった。一方、モーターによって高度なトルクベクタリングを行う2014年の5代目レジェンドに適用したSPORT HYBRID SH-AWDの開発にあたっては、郊外のワインディング路に加え「常用域」の範ちゅうに入る次の5つのシーンで狙いの効果を定め、これらを実現するための制御技術を構築した。
● 交差点 右左折での小回り感向上(旋回方向にヨーモーメントを発生)
● 高速道路料金所から旋回しながらの本線進入 軽快でスムースなターンイン特性の実現(旋回方向にヨーモーメントを発生)
● 高速道路でのレーンチェンジ 安心感の高い高速安定性(旋回抑制方向にヨーモーメントを発生)
● 緊急回避操作 スムースで懐の深い限界挙動(旋回抑制方向にヨーモーメントを発生)
● 雪上 路面によらない安心感の高い操安性能(低μ路面に合わせた制御に切り換える)
制御はドライバーの操作意思に対して忠実に、かつ高い応答性で実現するため、フィードフォワードを主体とした。ただし、フィードフォワード制御のみでは車両特性の変化や路面等の環境変化により制御性能が低下する可能性があるため、フィードバック制御で安定性を保証する制御構成としている。
フィードフォワード制御は、ドライバー意思(ハンドル操作量、アクセル操作量)と旋回の程度(横加速度)に応じて、前後駆動力と後輪左右駆動力の配分を決定する。前後駆動力配分制御は、加速によるリアへの荷重移動と、操舵による前輪の横力負担負荷に対して、前後輪の負担を均衡化する観点から、ドライバーの加速意思と旋回の程度に応じて後輪へのトルク配分量を変化させる。
同様に左右駆動力配分制御は、ドライバー意思と旋回の程度に応じて必要とされる付加ヨーモーメント量を算出し、後輪左右の駆動力を決定する。SPORT HYBRID SH-AWDはツインモーターユニットによってエンジン駆動力によらずヨーモーメントを発生させることが可能なため、比較的アクセル開度が小さな常用シーンからトルクベクタリングの効果を発生させることができる。
この特徴を生かし、基本制御としては、車速とハンドル角により、操舵に対する車両応答ゲインの低い低車速域では大きな旋回ヨーモーメントを発生させて応答ゲインを高める。一方、応答ゲインが高い高車速域では、旋回抑制方向にヨーモーメントを発生させて車両の安定化を図る。
旋回(正配分)ヨーモーメントを発生させるか、旋回抑制(逆配分)のヨーモーメントを発生させるかの判断を車速のみに頼ると違和感が生じるため、車速に加えアクセル開度や横加速度に応じて正逆を切り換える処理を行うことにより、自然なフィーリングを実現した。
さらに、ハンドル角とアクセル開度の変化速度に応じた制御指示を行う微分制御機能を加えることで、操舵に対するヨーレート初期応答の向上と、アクセル操作による車両姿勢のコントロール性向上を図ることができ、ドライバー操作に対してよりダイレクトで軽快な動きが得られるようにした。
フィードバック制御は急操舵時の過渡安定性向上、過度なタックイン抑制など、主に車両特性の変化に対し安定性を向上させる目的で行う。ツインモーターユニットによって安定(旋回抑制)方向のヨーモーメントを発生させるだけでなく、前輪へのトルク配分量を増やすことで後輪の横滑りを抑制し、車両挙動を安定方向に導く。
こうした制御を磨き上げることで、SPORT HYBRID SH-AWDはSH-AWDが備えていたワインディング路で狙いどおりにしっかり曲がる効果に加え、前述した常用域の5つのシーンで狙いの効果を発揮。多くのシチュエーションで、軽快かつ安心感の高い走りの実現に貢献した。




