
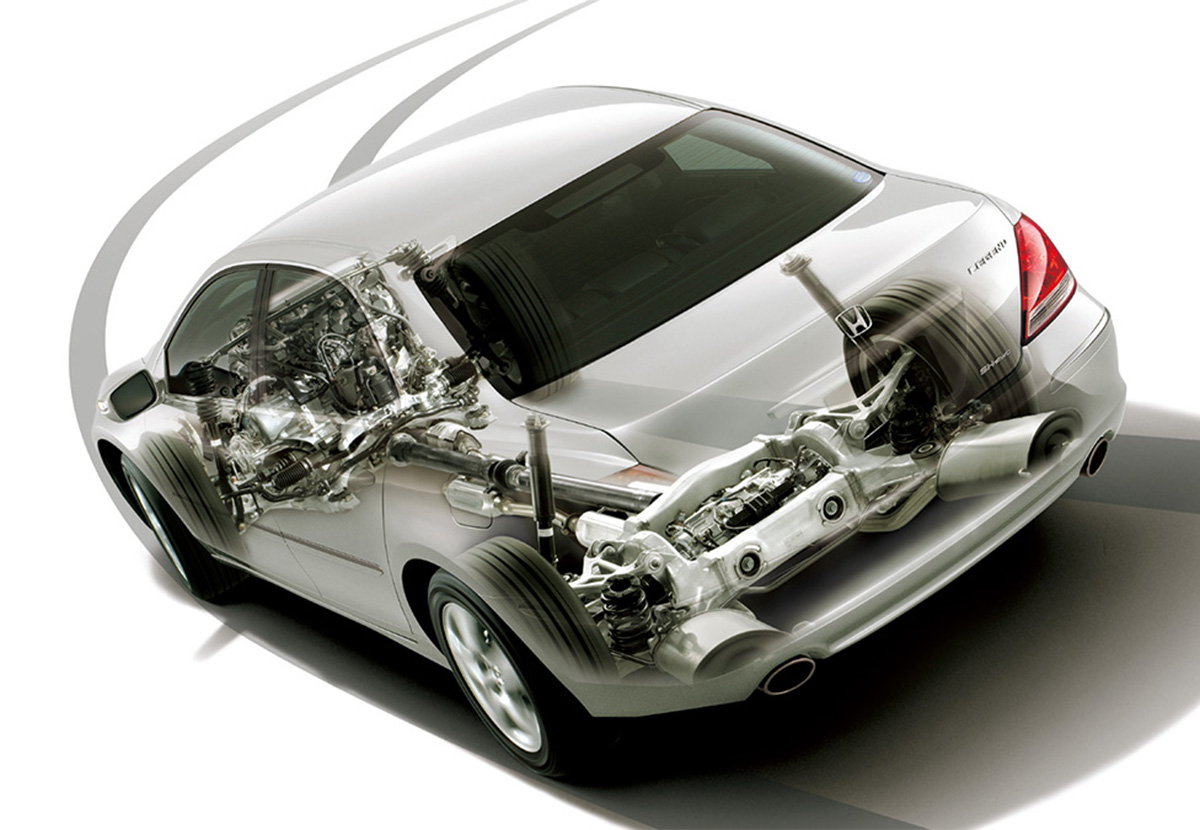
限界域だけではなく常用域も含めて広い範囲で「意のまま」のハンドリングを目指したのが、リアトーコントロールシステムのPrecision All-Wheel Steer(P-AWS)である。FF車のマルチリンク式リアサスペンションのトーコントロールアームを電子伸縮アクチュエーターに置き換えることで、後輪左右の独立操舵を実現した。
リアサスペンション
 ※写真はACURA TLX
※写真はACURA TLX
トーとは、車両を上面視した際のタイヤの向きを指す。タイヤが真正面を向いた状態のトー角はゼロ。前方の開きが後方より狭いハの字の状態をトーイン、逆に前方よりも後方が狭い状態をトーアウトと呼ぶ。P-AWSはリアのトーを左右独立で制御することにより、トーイン、トーアウトを自在に制御することが可能。さらに、後輪左右を前輪と同じ向きにする同相、前輪と逆の向きに切る逆相とすることも可能で、走行状態に応じて適切なトー角を設定できる。
P-AWSは2012年11月のロサンゼルスオートショーで発表(発売は2013年春)したアキュラRLXに搭載した。RLXと同型のHondaレジェンドは2014年11月10日に国内で発表(発売は2015年2月20日)したが、4輪の駆動力を自在に制御する3モーターハイブリッドシステムのSPORT HYBRID SH-AWDのみの設定とし、P-AWSは設定していない。
Hondaは1998年にVSA(車両挙動安定化制御システム)をFF車に搭載した。VSAはABS(Anti-lock Brake System)とTCS(Traction Control System)及び横滑り抑制機能を統合し、危険回避のステアリング操作によって起きる急激な挙動変化や、いわゆるアンダーステア/オーバーステア挙動などの車両不安定を各輪のブレーキ制御により抑制する装置である。
1982年にHondaで初めて適用したABS(当時の名称は4w A.L.B.=4wheel Antilock Brake system)はブレーキ力を弱めたり強めたりすることで限界減速領域での車両の安定性を確保する装置であり、1989年にHondaで初適用したTCSは、滑りやすい路面での発進加速や加速時に発生する駆動輪の空転を抑える装置で、限界加速領域での効率的な加速や安定性を確保する装置である。
ABSとTCSの機能に横滑りを抑制する機能を付加したVSAは、制御範囲を限界旋回領域まで拡張して車両の安定性を向上させる装置である。ABS/TCSはドライバーがブレーキまたはアクセルペダルを踏んだときに効果を発揮する一方、VSAは運転操作の有無にかかわらず効果を発揮する
すなわちVSAはいずれも、車両の限界領域での挙動をコントロールし、挙動を安定させ、さらなる安心感のある走りを提供する装置といえる。HondaはVSAがカバーする限界領域だけでなく、車両が不安定な状態になる前の日常域でも安定性や操縦性を高める装置により、幅広いシーンで意のままに動く楽しさと安心感を提供したいと考えた。それがP-AWSの開発に結びつく。
Hondaは1987年に4輪操舵システムの4WS(4 Wheel Steering)を実用化している。世界初の舵角応動型4WSであるホンダ4WSは、車両の旋回領域の特性を可変することができる装置だ。これを実現するには前輪を操舵するのと同様のステアリングギヤボックスがリアにも必要になり、フロントとリアを結ぶセンターシャフトも必要で、システムが大がかりになり、相応のスペースも必要とした。また、後輪を操舵するタイロッドも欠かせないため、リアサスペンションを専用に設計する必要がある。
P-AWSを開発するにあたっては、厳しいコスト目標を掲げつつ、搭載性に優れたシステムの開発で実現できることを重要視した。また、従来の4WSは通常と異なる車両挙動から違和感を感じる場合があるとの指摘を受け、違和感のないフィーリングを目指すこととした。
P-AWS アクチュエーター
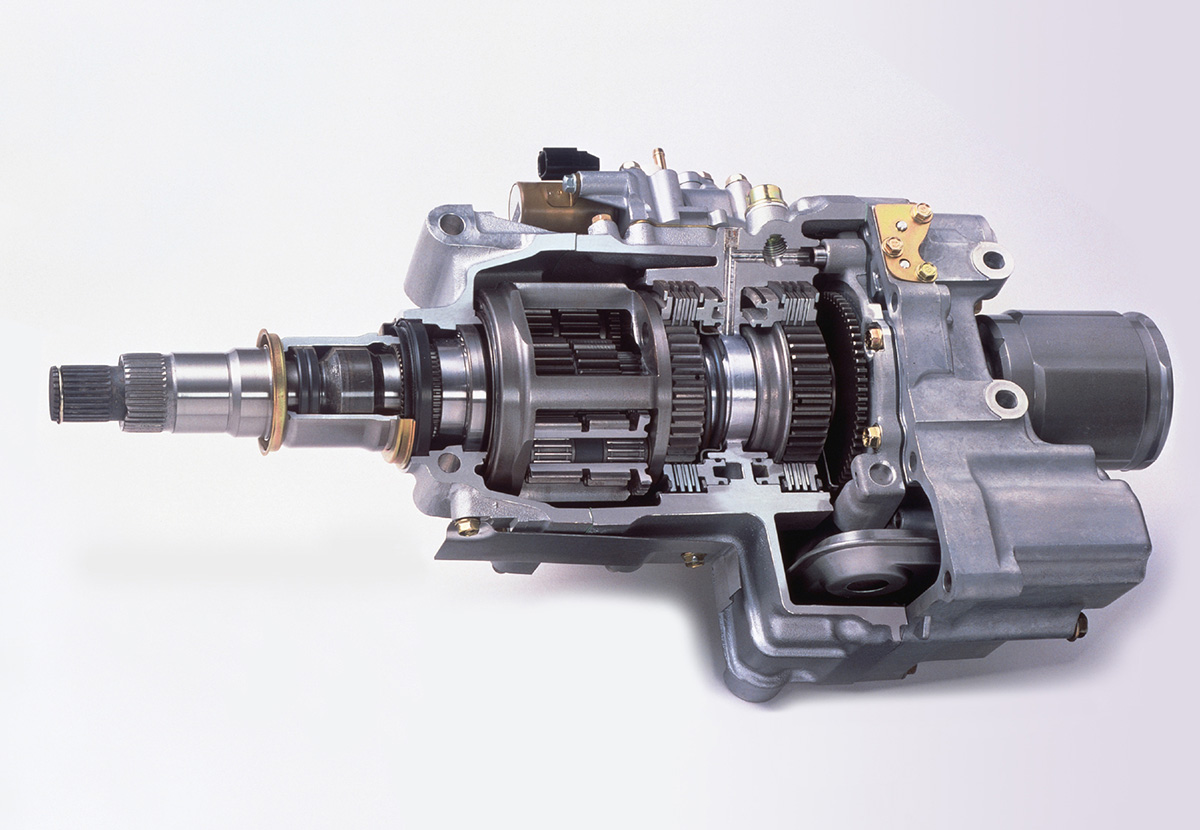
マルチリンク式リアサスペンションのトーコントロールアームと置き換える格好で搭載する同軸式伸縮アクチュエーターは、DCモーターにより台形ねじを回転させることでロッドを伸縮させるシンプルな構造を持つ。台形ねじは逆効率が高い(外力で動きにくい)ため、非駆動時にはモーターに通電することなくトー角を保持でき、システムを省電力とすることができた。また、減速機にはコンパクトで高減速を実現する遊星歯車を採用。非接触式のポジションセンサーでトー角のセンシングを行う。
左右のアクチュエーターは、ステアリング舵角、アクセルペダル開度、ブレーキ圧などのドライバー操作と、車輪速度、ヨーレート、横Gなどの車両情報の、どちらもCANを通じてECUに入力される情報をもとにP-AWS専用ECUによって左右輪それぞれの目標トー角を演算し、アクチュエーターに指令を送る。安全面を考慮し、後輪の切れ角は逆相側で最大2度に設定した。
制御はドライバー操作と車両情報をもとに、横加速度に応じて旋回不安定モーメントを打ち消す復元ヨーモーメントを発生させるフィードフォワードとした。狙いの動きとの差に応じてフォードバック制御をかけ、違和感なく車両挙動を安定させる。
P-AWSはトーコントロールアーム置換型とすることで、旋回領域の特性を可変する4WSの効果に加え、従来はタイヤへの外力によってパッシブに変化したトー変化をアクティブに変化させることができるのが特徴だ。例えば、ゴムブッシュを介して車体に取り付けられるコンベンショナルなトーコントロールアームを用いた場合、旋回時にタイヤに横力が加わるとブッシュの弾性変形によってトー変化が生じる。
外力によるトー変化を積極的に使うことをコンプライアンスステアというが、P-AWSは外力の発生を待たずにトー角を制御することができるので、旋回に加減速を加えた全領域で遅れがなく、違和感のない制御が可能になる。
シチュエーション別に見ていくと、低速域では後輪を前輪と逆相に操舵することで、車体の向きと進行方向のずれを指す車体スリップ角が減少するため内向き感が発生し、クルマが思いどおりに曲がる感覚を得ることができるようになる。しかし、極端にスリップ角を変化させると通常のクルマと異なる車両挙動から違和感につながるため、制御を入念にチューニングして最適化した。
また低速域では、違和感のない自然な逆相制御によって軽快に動き、かつ小回り性が高まるため、実際の車両を見てイメージするほど大きさを意識しなくて済むといった効果が生まれる。
逆位相制御

同位相制御
高速域では後輪を前輪と同相に動かすことで車体スリップ角が減少し、横加速度の位相遅れが減少するため車両が安定し、安心感が向上する。これは4WSの大きなメリットでもあるが、P-AWSでは車速に応じてスリップ角が滑らかに変化するように制御則を設定し、高速域での安心感をより高めた。
一般的に、加減速を伴う旋回を行うと、左右だけでなく前後方向にも力が加わるため、車両の挙動に影響を与えやすくなる。とくに減速時は後輪の荷重が減少するため、後輪のグリップ力低下によりスピン方向の動きが出やすくなる。P-AWSでは車速と前後加速度の状況からリアをトーインとすることで、車両の基本安定性をあらかじめ高めておくことができる。
トーイン制御

一方、加速旋回では、リアに荷重移動してフロントの接地荷重が減少し、前輪のグリップ力低下により車両が外側にふくらみやすくなる。とくに前輪で駆動するFF車はフロントタイヤの能力を駆動側で使うため、この傾向が強くなりがちだ。P-AWSではアクセル開度やギヤポジション、前後加速度などからあらかじめ車両の曲がりにくさを推定し、操舵ゲインが高くなるようトー角を制御し曲がりにくさを解消する。
車両の挙動が不安定方向に振れたら修正するのではなく、不安定な挙動を抑制しつつ、応答高く、自然な動きで制御するのがP-AWSの特徴。広く日常域をカバーし限界域まで、全方位で「意のまま」のハンドリング実現に貢献する技術である。




