
コーナリング時
登坂時
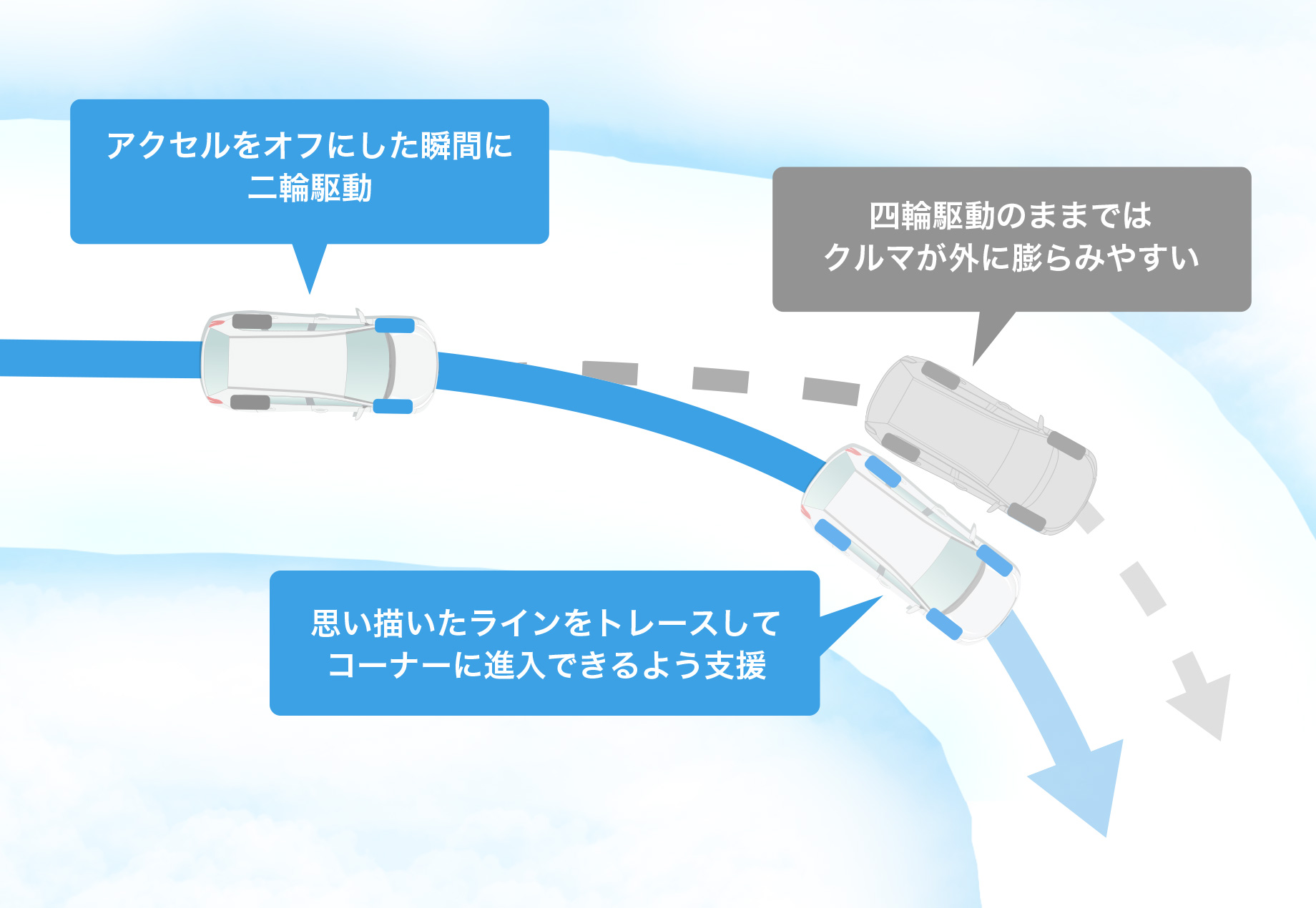
技術のしくみ/コーナー進入時
「リアルタイムAWD」はアクセルペダルを踏み込んでいる駆動時は四輪駆動が基本ですが、アクセルペダルをオフにした瞬間に後輪への駆動力配分をやめ、二輪駆動とします。そのため、コーナー手前の減速時にアクセルペダルをオフにした状況では、後輪との機械的なつながりから解放され、クルマは向きを変えやすい状態になります。その状態でステアリングを切り込むので、クルマが外にふくらむことなく、ドライバーが思い描いたラインをトレースしてコーナーに進入することができるようにサポートします。
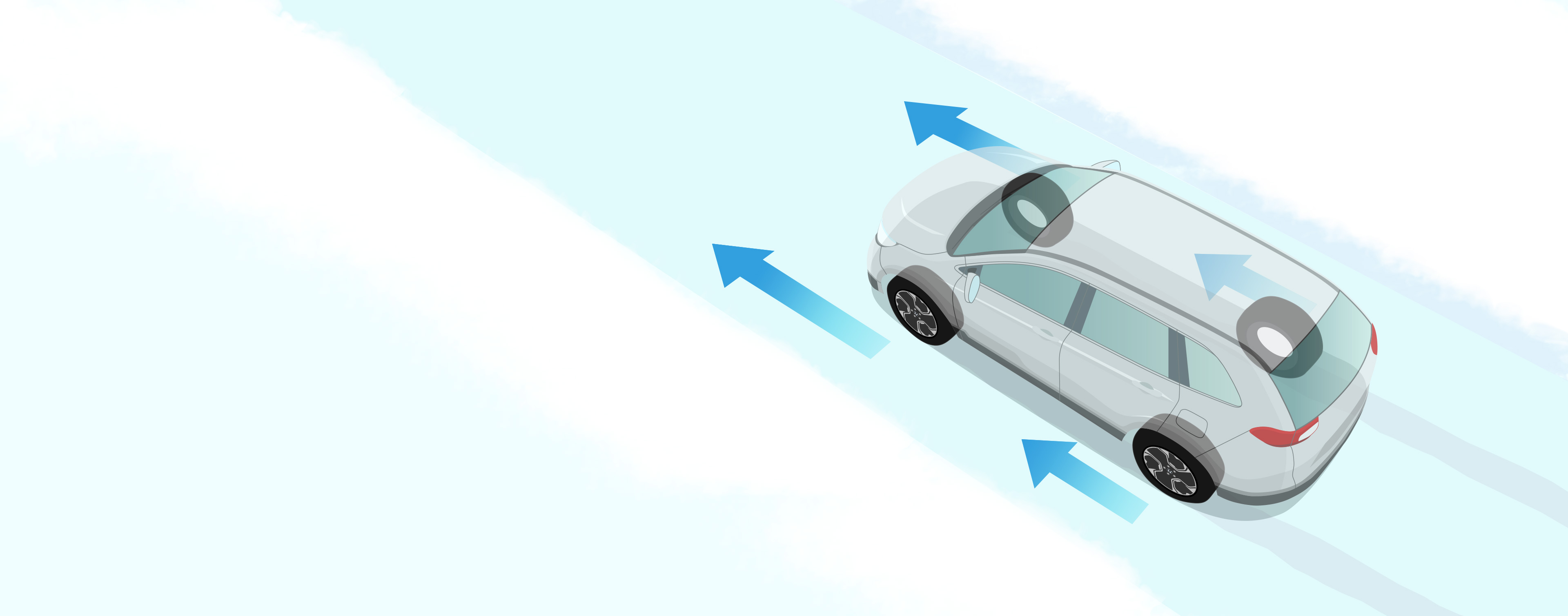
技術のしくみ/コーナー旋回加速時
「リアルタイムAWD」はアクセル開度や車輪速、ギヤ段などに加え、ステアリング舵角やヨーレート(ステアリングを切った方向に、車両がその場で回転しようとする速度)など各種センサーからの情報をもとに、クルマの状態をリアルタイムに把握しています。そのため、コーナーの入口から脱出に向けてアクセルペダルを踏み込むと、瞬時に理想的な前後の駆動力配分を算出し、最適な駆動力を後輪に伝えることができます。
コーナーを曲がりながら加速するシーンでは、後輪に最適な駆動力を配分することで前輪の負担が減り、前輪の曲がる能力をより引き出すことができるようになります。その結果、加速初期の段階でクルマが外にふくらむことなく、ドライバーがイメージしたとおりのラインを安心してトレースできるよう支援することができます。
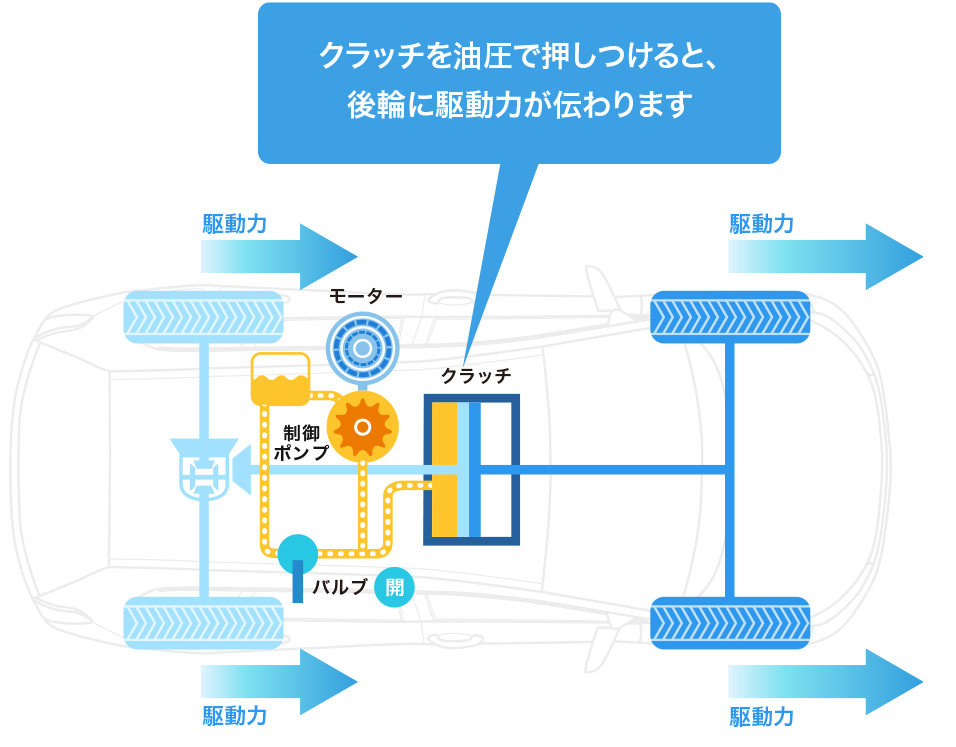
後輪に駆動力を伝えるユニット
後輪に駆動力を伝えるユニットは、油圧ピストンでクラッチを押しつける仕組みです。クラッチを押しつけると、後輪に駆動力が伝わります。クルマの状態に応じて細かく押しつけ力を調節することにより、高い安定感と優れたハンドリング性能をもたらします。
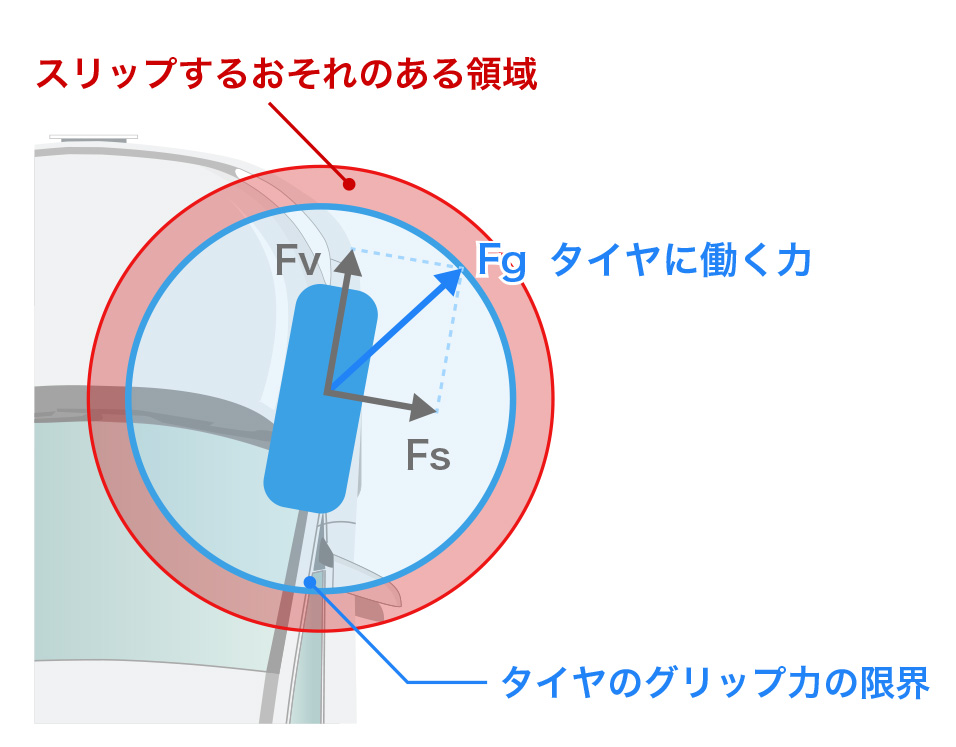
タイヤの負荷均衡イメージ
タイヤの能力を円で示したのが右の図です。円の面積は荷重移動によって変化します。例えば、登坂路では荷重が後輪に移動するため前輪の円は小さくなり、グリップ限界は低くなります。また、路面とタイヤの摩擦係数の影響を受け、雪道のように滑りやすい路面だと円は極端に小さくなります。円が小さくなれば、加速しにくくなり、曲がりにくくなります。大きな駆動力をかけた場合は、その段階でグリップ限界に達するため、曲がりにくくなります。四輪駆動で前後の駆動力を最適に配分すると、タイヤの負担が分散するため、加速しやすく、曲がりやすくなります。

技術のしくみ/登坂路発進時
平坦な路面での発進時は、クルマの前後重量配分に合わせた前後駆動力配分を基本にしています。それが、安定した走りを生む理想的な駆動力配分だからです。FF(前輪駆動)ベースのクルマでは6:4の駆動力配分が相場です。FF車が苦手とするのは、雪道などの滑りやすい路面で坂道発進するシーンです。上り勾配がついている状態では荷重がリアに移動するため、前輪を路面に押しつける力が弱くなり、駆動力を路面に伝えようとするとスリップしやすくなるからです。
リアルタイムAWDはGセンサーからの情報をもとに上り勾配を判断すると、発進時は荷重が大きく、駆動力を伝える能力が前輪より高い後輪への駆動力配分を高める制御を行います。前輪がスリップしてから後輪に駆動力を配分する方式では、動き出すまでにタイムラグがあるため、ドライバーを不安な気持ちにさせることがあります。予測制御によって応答性に優れたリアルタイムAWDはアクセルペダルを踏み込んだ瞬間から前後の駆動力が最適に配分されるので、安心して走り出すことができます。
技術のこだわり
リアルタイムAWDは四輪駆動を新しい発想で捉え、開発しました。FF(前輪駆動)ベースの四輪駆動の場合、従来は前輪が滑ったのを判断してから、後輪に駆動力を伝える制御が一般的でした。一方、リアルタイムAWDは四輪のタイヤが持つ能力を最大限に引き出す視点で開発しています。発進時を含め、前輪のグリップ限界を超える手前の段階から積極的に後輪に駆動力を配分することで、前輪の能力に余裕が生まれます。その余裕を生かすことで、狙いどおりのラインをトレースし、安定した姿勢を保った状態で安心してアクセルペダルを踏み込めるようにサポートします。
Hondaはあらゆる状況で意のままの走りを実現するため、前後だけでなく左右の駆動力配分を行う「SH-AWD」を開発しています。リアルタイムAWDの改良は、SH-AWDを開発するなかで着想がありました。「前後の駆動力配分を適正化することで十分にハンドリング性能の向上に効果がある」ことがわかったのです。しかも、緻密かつ応答性の高い制御により、雪道の走破性だけでなく、ドライ舗装路でのハンドリング特性向上に貢献できることがわかりました。これらの効果を実現するためには、後輪に駆動力を伝達するユニットの制御を見直す必要がありました。従来制御では、車載ECUが導き出した要求トルクに追従できないシーンが出てきたのです。この課題を克服するため、ハードウエアを変えることなく新しい制御を開発し、シーンを問わず最適な前後駆動力配分を行えるようになりました。そのうえで、搭載車種のキャラクターに合わせた最適なチューニングを行っています。




