「先進操船支援技術」は、水上の移動をクルマの運転のように、楽しめるものにする操船支援システムです。ボートユーザーが操船時に最もストレスを感じるとされる※1着桟およびトレーラーローディング操作をシステムが支援し、ストレスフリーで安心感のあるマリン体験を提供します。
※1 Honda調べ
人間中心の思想で、操船のありたき姿をゼロから模索
Hondaは創業以来、「人」を中心に考えた製品開発に取り組み続けてきました。二輪車、四輪車、パワープロダクツ、そして航空機に至るまで、陸・海・空すべての製品にその思想は息づいています。
Hondaはマリン領域において、船外機を提供するパワーユニットメーカーの立ち位置を確立しながら、今後は他の製品カテゴリーでの知見を活かし、ボートにおける人の操作、つまり操船に関しても貢献できるのではないかと考えました。
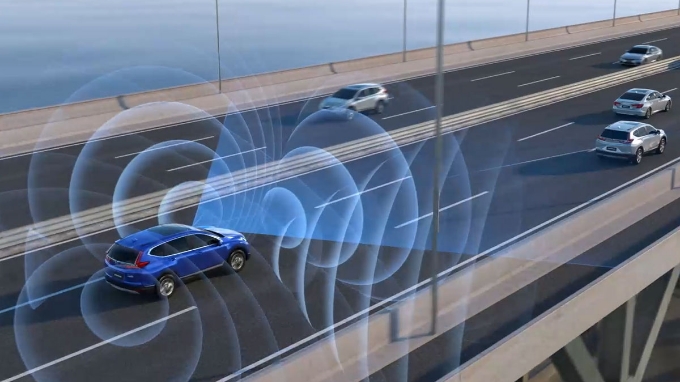
そこで、先進安全技術など四輪で開発を担ってきたメンバーも操船支援技術の開発チームに参画し、これまでの常識にとらわれることなく、「人」を中心に考えた操船のあり方をゼロから模索。エントリーユーザーの敷居を低くすることはもちろん、経験を積んだユーザーにも安心と快適を提供する支援技術を研究・開発しています。
難易度が高い離着桟を、クルマで培ってきた先進技術で支援
マリン操縦でユーザーの負担となるのが、離着桟の難しさです。水上で常に風や波、潮流などの影響を受けるボートは、何もせずにその場にとどまることがないため、ブレーキをかければ停車するクルマの運転とは異なり、より高度な操船スキルが求められます。
周囲の微細な変化から風や潮の流れを読み取り、状況に応じて的確な判断が行えるようになるには多くの経験を積む必要があり、経験の浅いユーザーにとって、離着桟のハードルは高いといえます。
実際に、ポンツーン艇※2ユーザーを対象に調査を行ったところ、クルマの運転と比較し、シーンにより感情やストレスの起伏が大きいことや、混みあったマリーナなど見通しが悪く狭い場所で、桟橋や他船への接触を避けながら多くの操作を行わなければならない状況が、ユーザーに緊張やストレスをもたらしている現状が浮かび上がってきました。
ポンツーン艇操船時におけるユーザーの感情分析
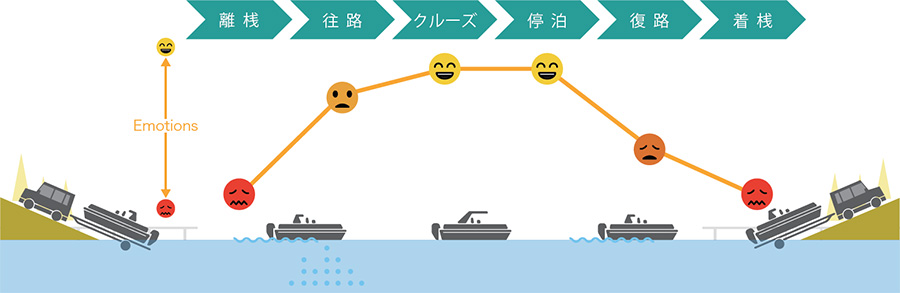
沖合でのクルーズ時や停泊時は、見通しもよく障害物が少ないためストレスは少ない。一方、着桟・離桟時は操船の要求精度が高くなり、ユーザーが抱えるストレスが増加傾向に
Hondaは、これらのユーザーが負担を感じる作業が残るマリン操縦にクルマで培ってきた支援技術を取り入れることで、自由な移動の喜びを、水上にも広げていくことを目指しました。
※2 フロア全体がオープンデッキになっている船艇。「水上のリビング」と形容される広いデッキを備え、船上パーティーや家族でのレジャー、クルージングなど幅広い用途を持ち、新たなマリンレジャーの選択肢として人気が高まっている
クルマを運転しているかのようなエルゴノミックコックピット
クルマでボートを牽引して湖や海などに出かけ、クルマのような感覚で快適に船を操る―そのような操船体験を目指し、エントリーユーザーが離着桟時に操船を難しく感じる要因について検証を重ねた結果、2つの課題がみえてきました。1つ目は、桟橋やトレーラーに近づいたときに死角が多く、距離感がつかみづらいといった認知の課題。2つ目は、最適な運転姿勢が取りにくいことに加え、離着桟時は低速なため舵が効きにくく思い通りにボートコントロールができないといった、操作の課題です。
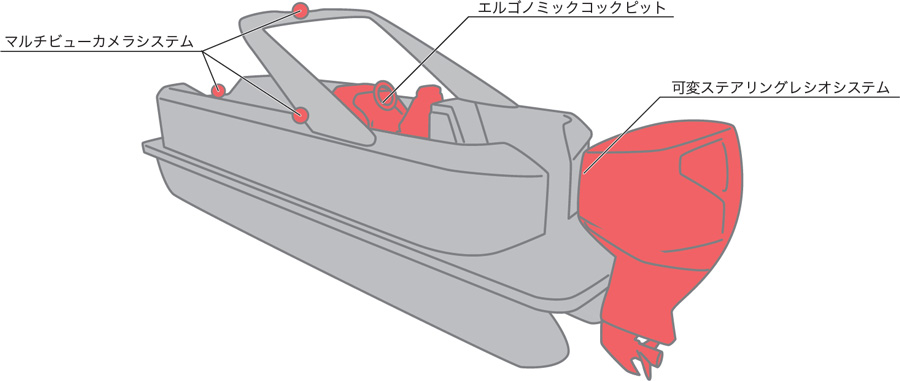
Hondaは、視覚と操作の両面での支援技術を追求し、視界が開け操船しやすい運転姿勢が取れるコックピットレイアウトを設計し、周囲の死角を減らすマルチビューカメラシステム、そしてクルマを運転する感覚に近いステアリング操作実現のため、操舵角と実際の船外機(舵)作動角比率が変化する可変ステアリングレシオシステムをパッケージにした、エルゴノミックコックピットシステムを開発しました。
エルゴノミックコックピットシステム
コックピットレイアウト
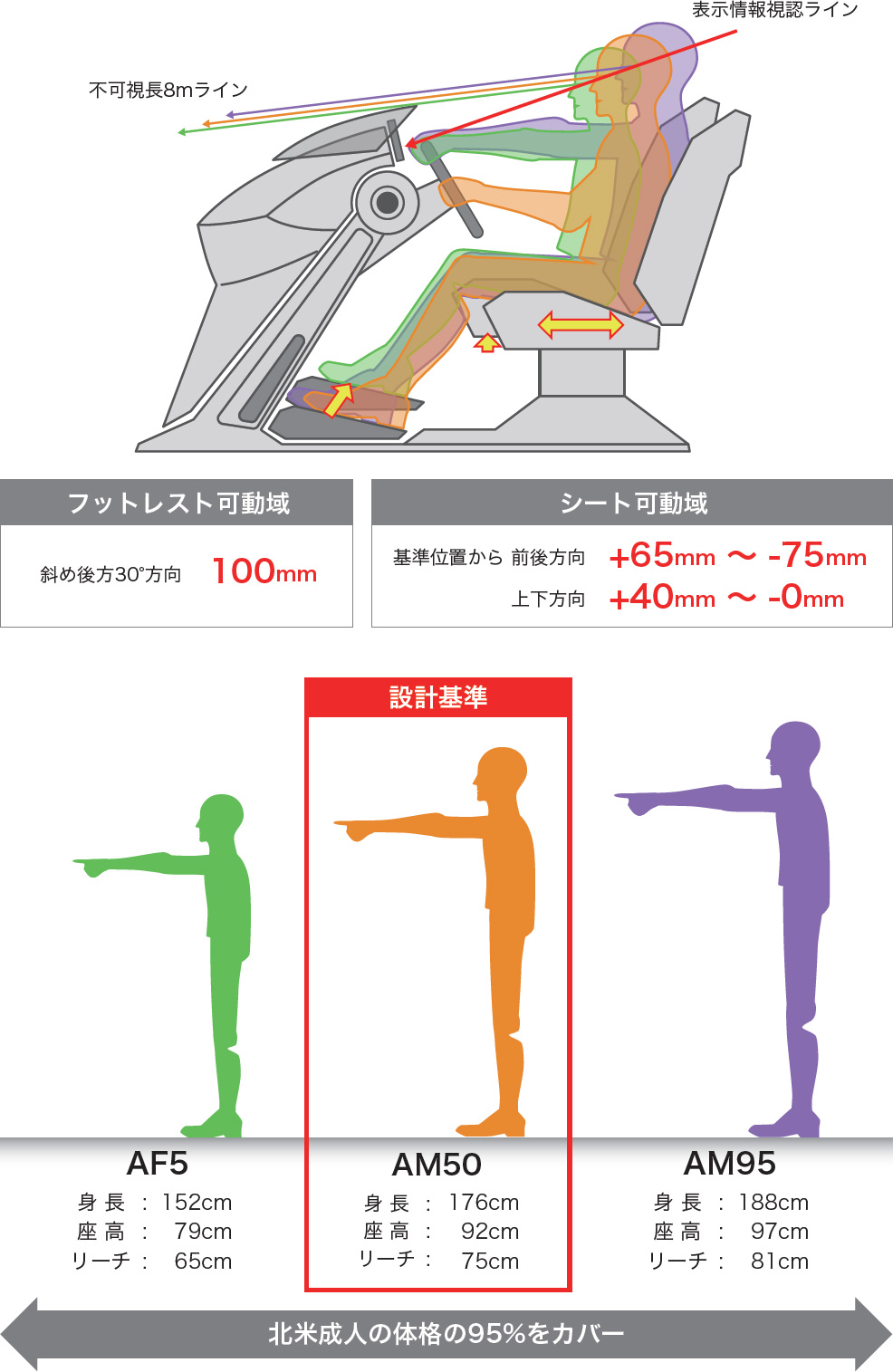
最適な運転姿勢を定めるにあたり、基準としたのはアイポイント。ポンツーン艇は四隅が張り出した四角いデッキ形状をしているため、桟橋などとの距離感をつかむ際にアイポイントの高さが大きく影響します。そこで、ディスプレイ表示が視認しやすい角度であると同時に、距離感をつかみやすい前方不可視長8メートルとなる高さにアイポイントを設定。
次に、ステアリング操作とディスプレイのタッチ操作が無理なく行える前後位置を定めました。これらを北米成人の95パーセントの体格でカバーするために、シートの前後・上下可動域を設定し、シートの高さに合わせて調節できるフットレストも設定しました。これにより、安定した視界で高い安心感が得られるとともに、操作がしやすく疲れにくい運転姿勢をとることが可能です。
人間工学に基づいたコックピットのレイアウト
マルチビューカメラシステム
船の前後左右を映すカメラで周囲の映像をディスプレイに表示。着桟時やトレーラーローディング時に死角になる前方下の他、後方や上空から見下ろしたような視界など、合計5種類のビューが設定でき、ディスプレイでのタッチ操作やボタン操作で切り替えられます。
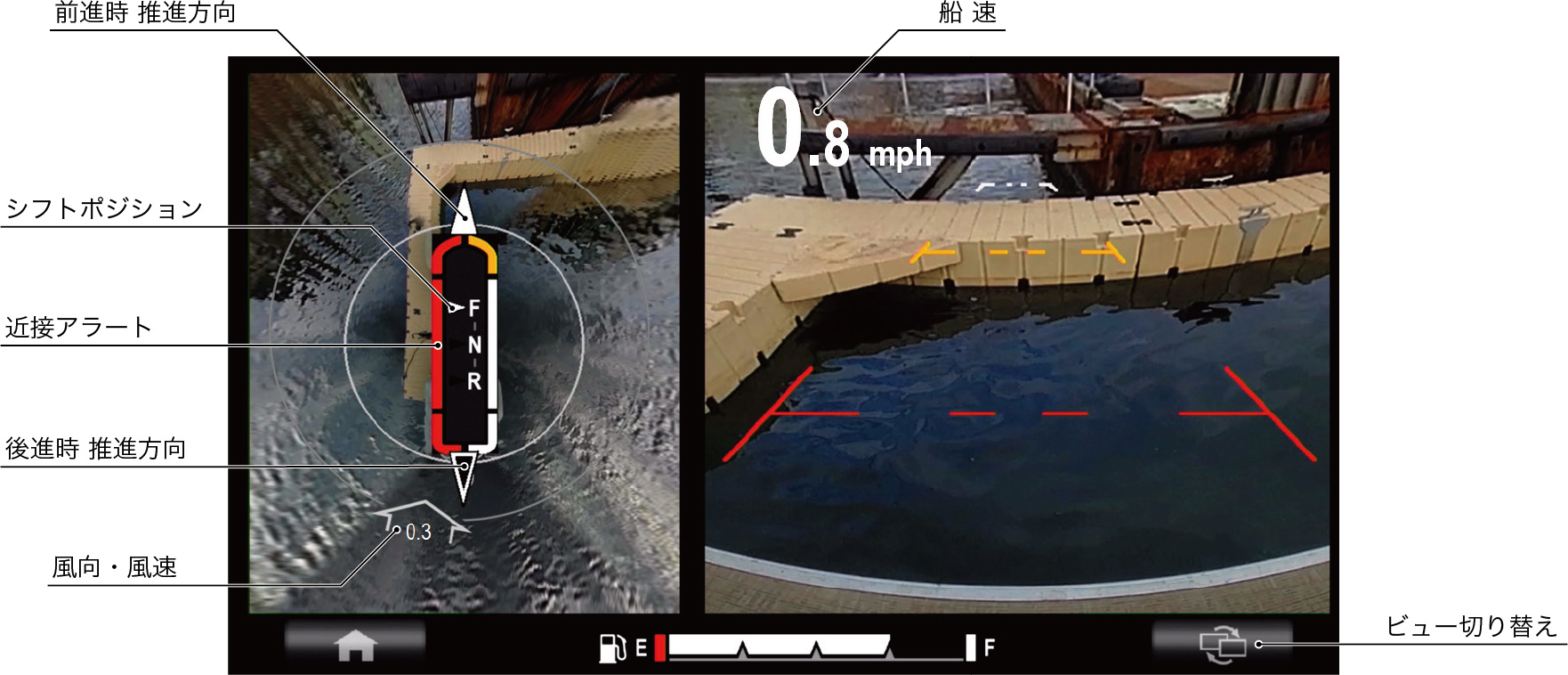
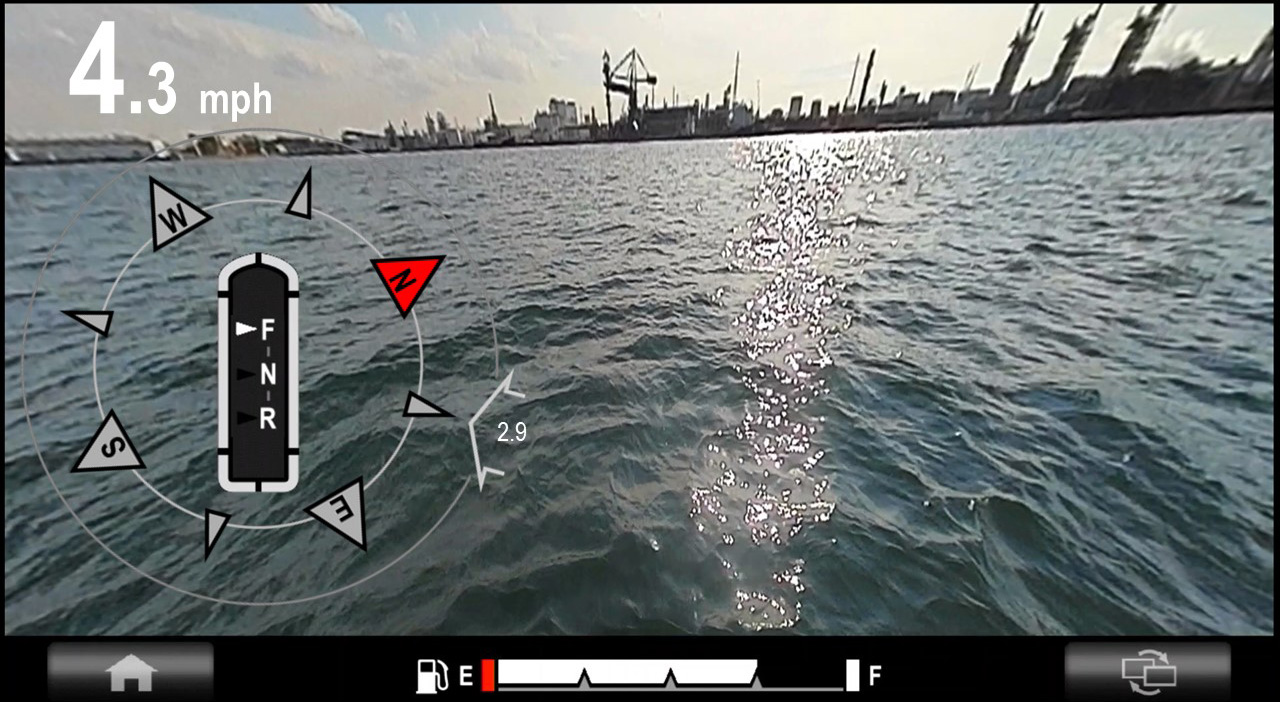
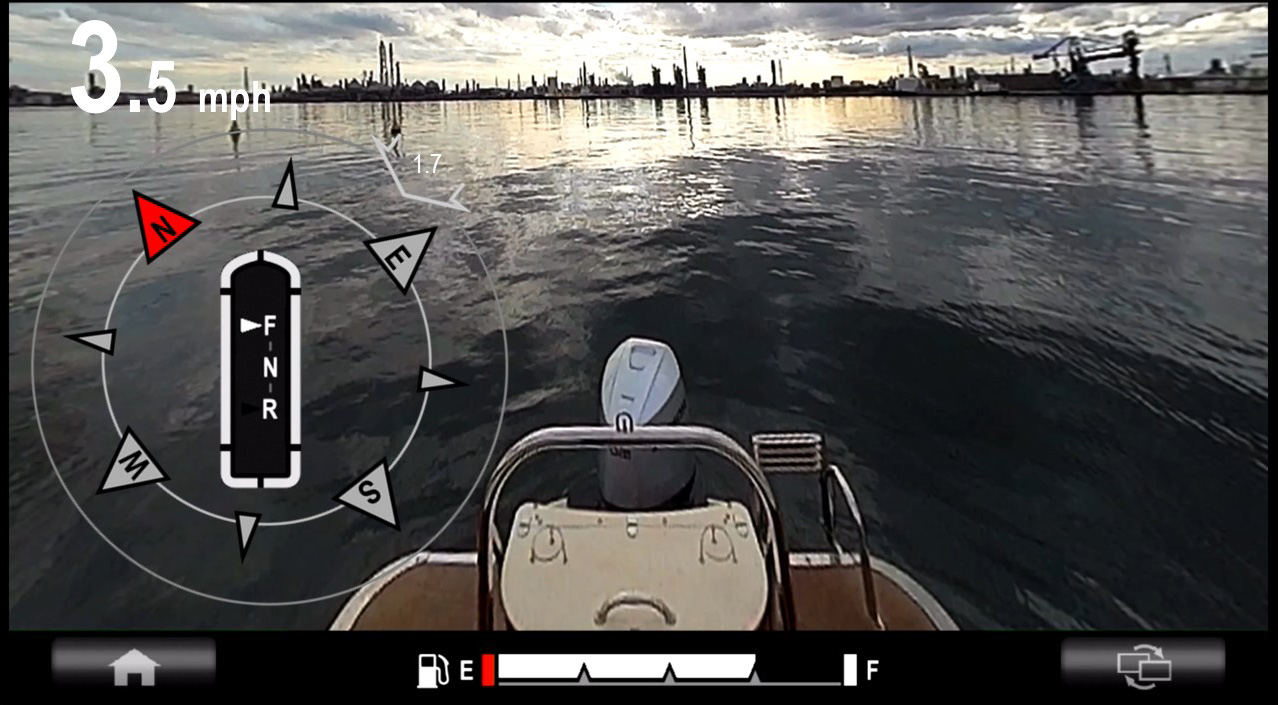
操船に必要な各種情報を1つの画面にわかりやすくレイアウトすることで、風やシフトポジションなどによる船の進行方向が直感的にわかるよう工夫を凝らしました。船速のほか、船首方位、推進方向、風向・風速、シフトポジションが自艇を表すグラフィックにリアルタイムに表示されるため、風や推進方向による船の挙動をひと目で把握することができます。
桟橋や障害物に近づくと物体との距離に応じて2段階で接近を通知し、操船者に注意を促します。
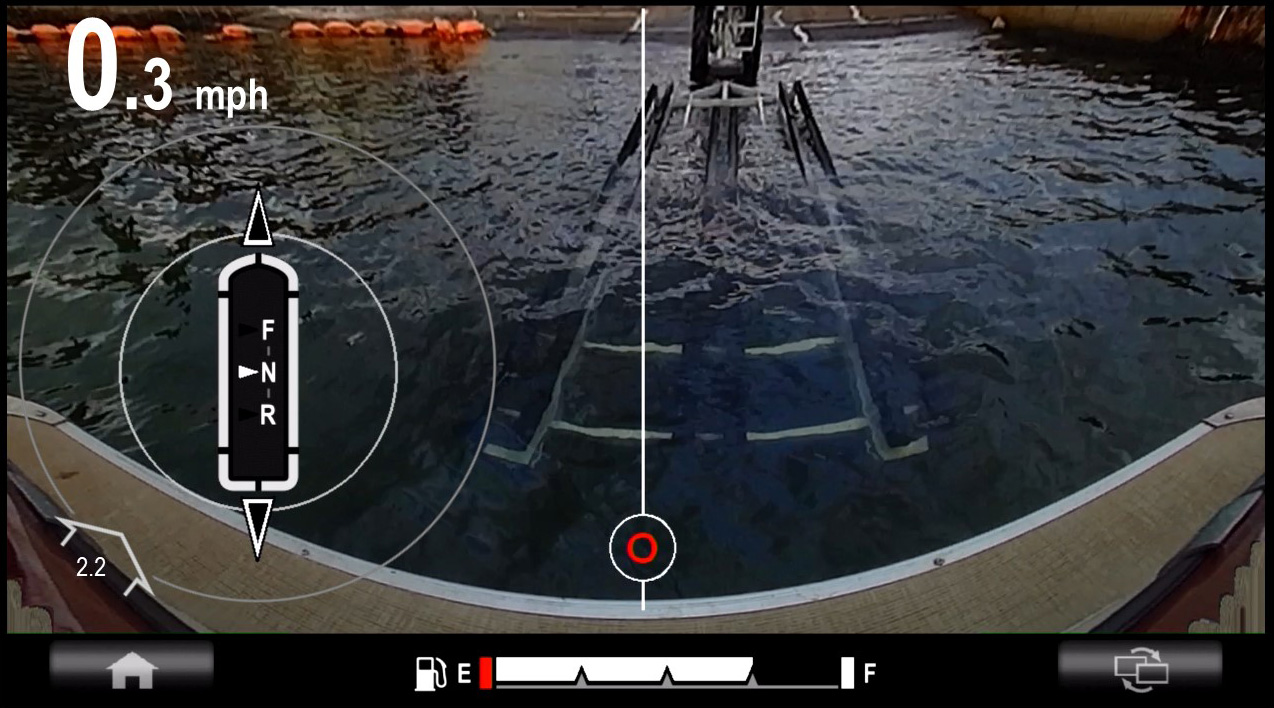
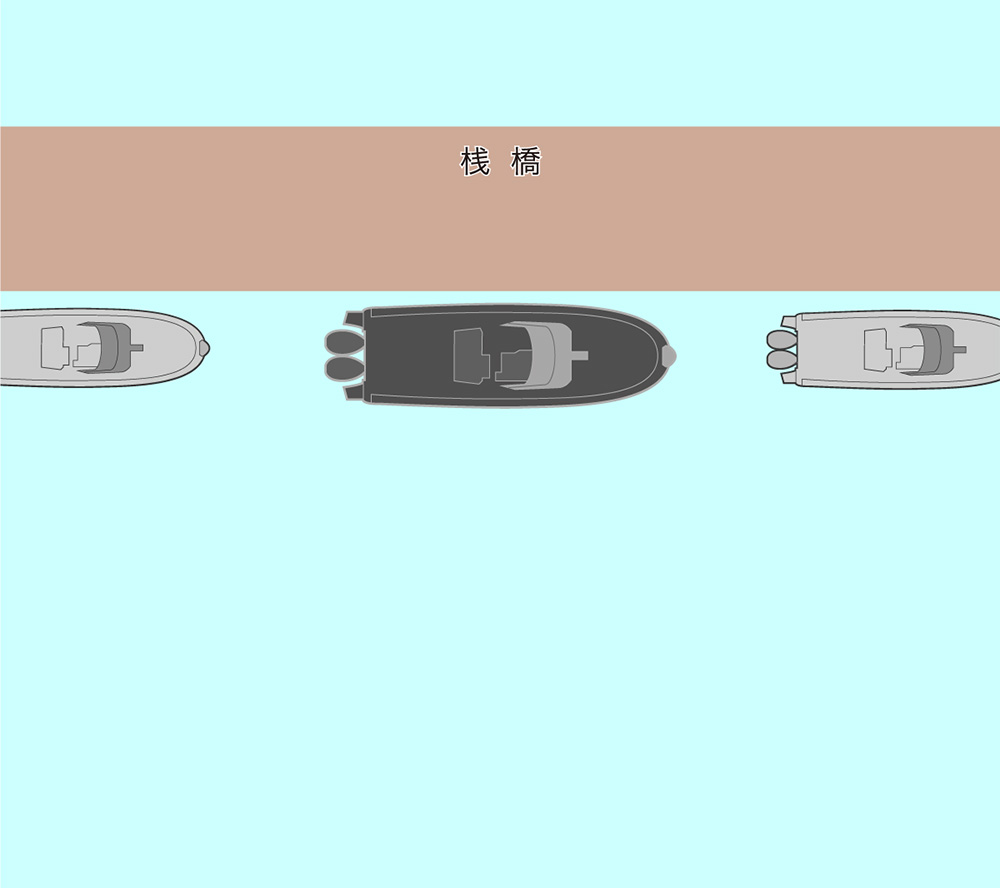
着桟ビュー
着桟時に360度船体周辺を表示する着桟ビュー機能
全周囲+後方ビューで、後進での離桟をサポート
トレーラーローディングビューでは、画面上に船のセンターを示すガイドラインを表示。そのラインとトレーラーのレールが合うように操船すれば、スムーズにローディングすることができます。
トレーラーローディングビュー
トレーラーローディング時にトレーラーガイド線を表示するトレーラーローディングビュー機能。ライン下方の赤い丸印は、船底の先端位置の目安を示す
特に、ポンツーン艇の場合、約30cmのレーンに船底を正確に合わせる必要がある上に、死角によってレーンと船底の位置関係を把握するのが難しいため、姿勢を崩して操作をしがちです。マルチビューカメラシステムにより、トレーラーローディング時など舵の方向を変えながら前進・後進をするようなシーンでも、立ち上がったり振り返ったりすることなく、安定した姿勢を維持したまま操船に集中することができます。
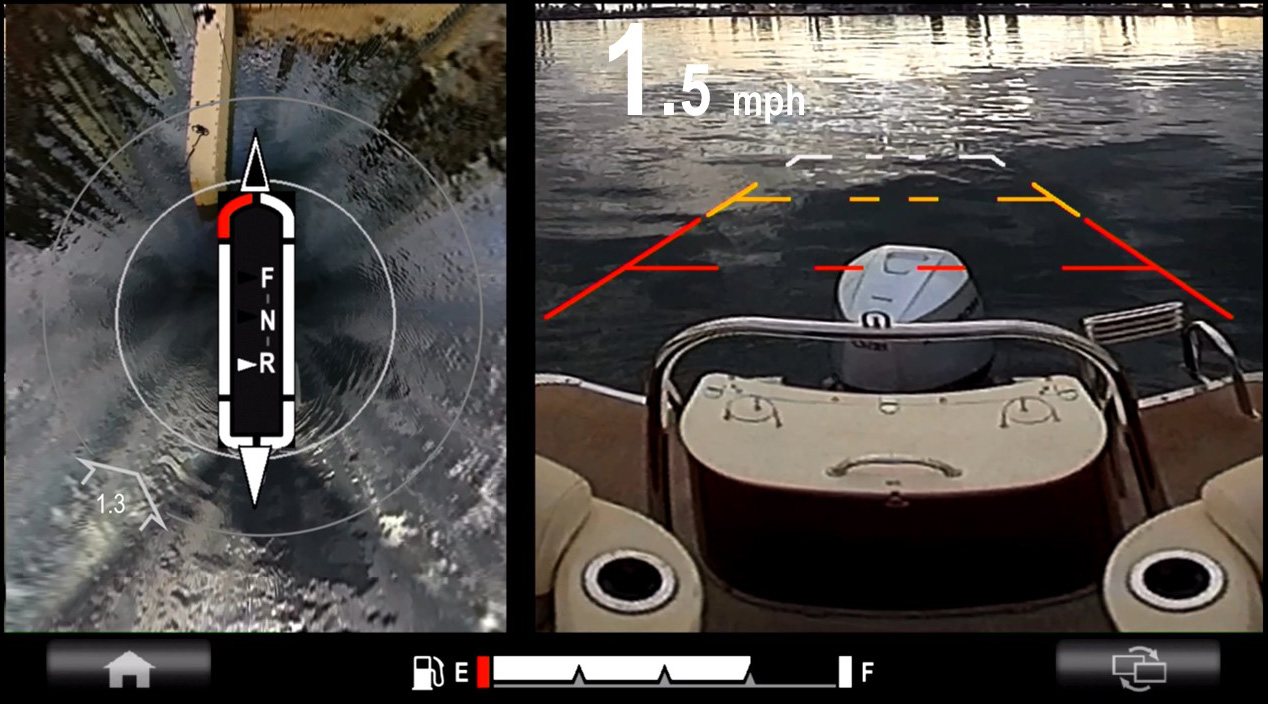
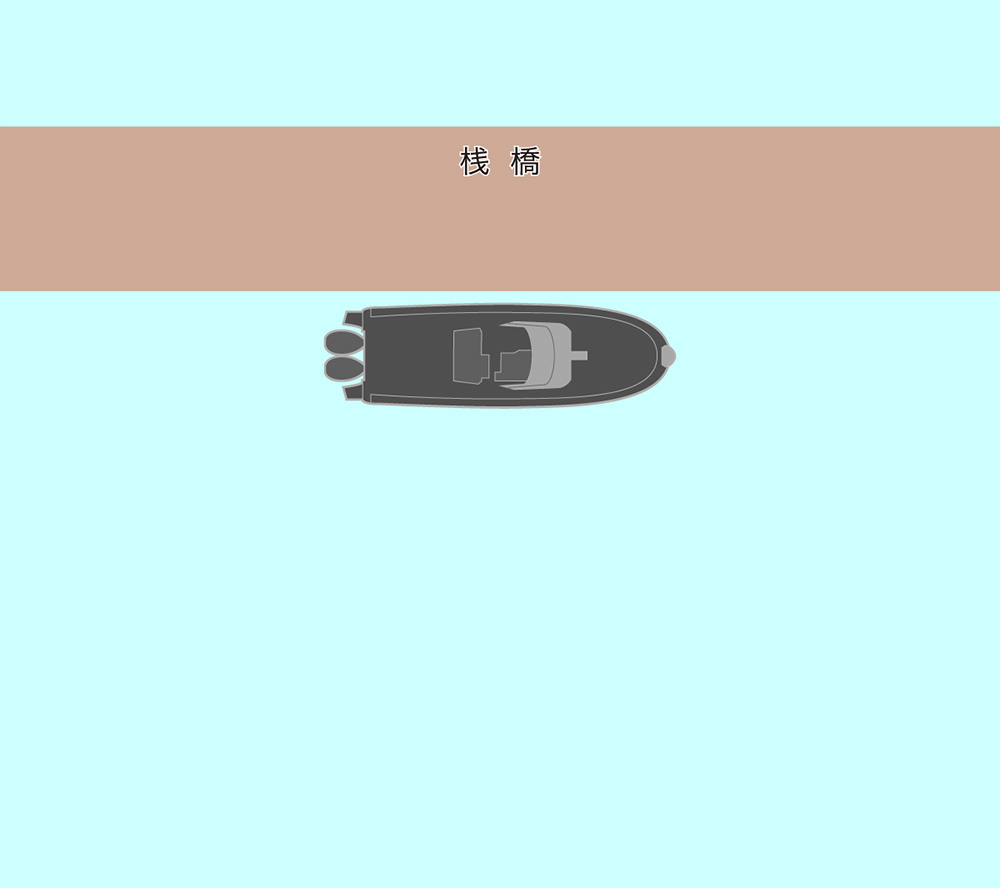
船首が上がる加速・クルージング時に前方視界を確保
クルージング中も広い視野角で後方を確認可能
ステアリングシステム
ポンツーン艇のステアリングには油圧システムが用いられており、ロック・トゥ・ロックは5回転が一般的です。そのため、離着桟時など低速で小回りをしたいときに、ステアリングホイールを何回転も回す必要があり、加えて低速では舵が効きにくいため、エントリーユーザーは応答性の低さから操作が遅れがちになり、船が蛇行するダッチロールに陥りやすくなります。そこで、ステアリングレシオを調整できる可変ステアリングレシオシステムを採用。船速に応じてロック・トゥ・ロックを2.5~4回転とし、低速時の取り回しのよさと、中・高速時の安定性を両立させました。
初めての場所でもスムーズにアプローチ。自動着桟システムがもたらす安心感
Hondaはさらに、操船のストレスを低減するエルゴノミックコックピットシステムとともに、自動航行を見据えた自動着桟システムにも取り組んでいます。
自動着桟システム
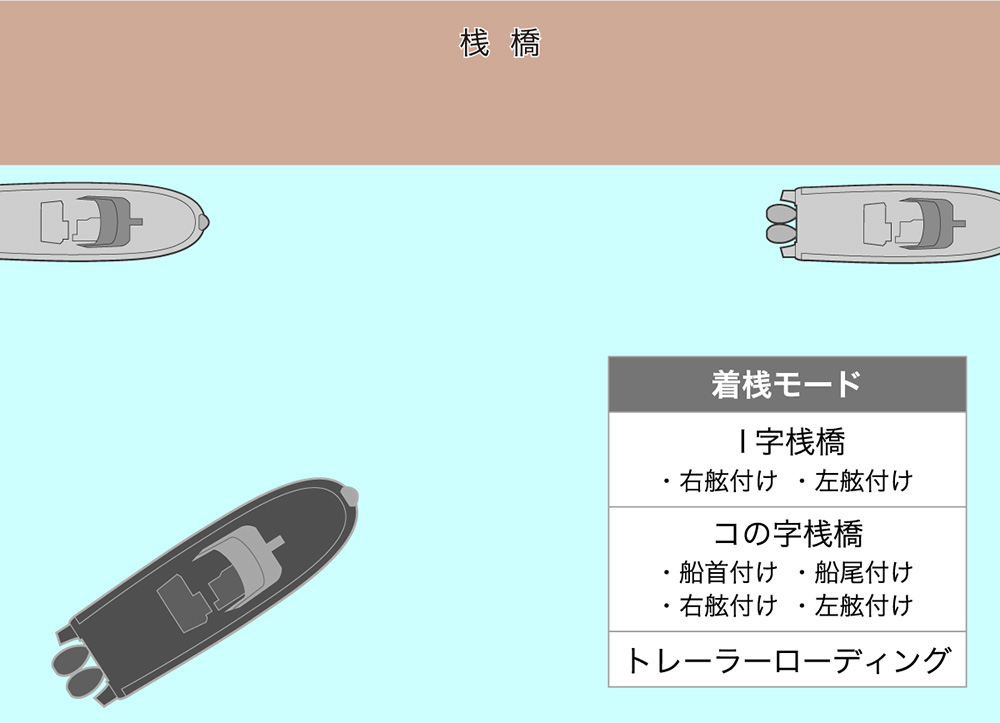
操船技術のなかでも難易度が高い着桟をシステムがユーザーの代わりに行うことで、初めて訪れるビジターバース※3などでもスムーズに着桟することができ、ユーザーの不安やストレスを軽減します。また、屋根付きを含むさまざまなバースへの着桟、後進での着桟も可能なため、マリン体験の可能性を広げます。
※3 バースとは船舶が着岸し、保管や荷役を行う岸壁や桟橋のこと
対応バース例
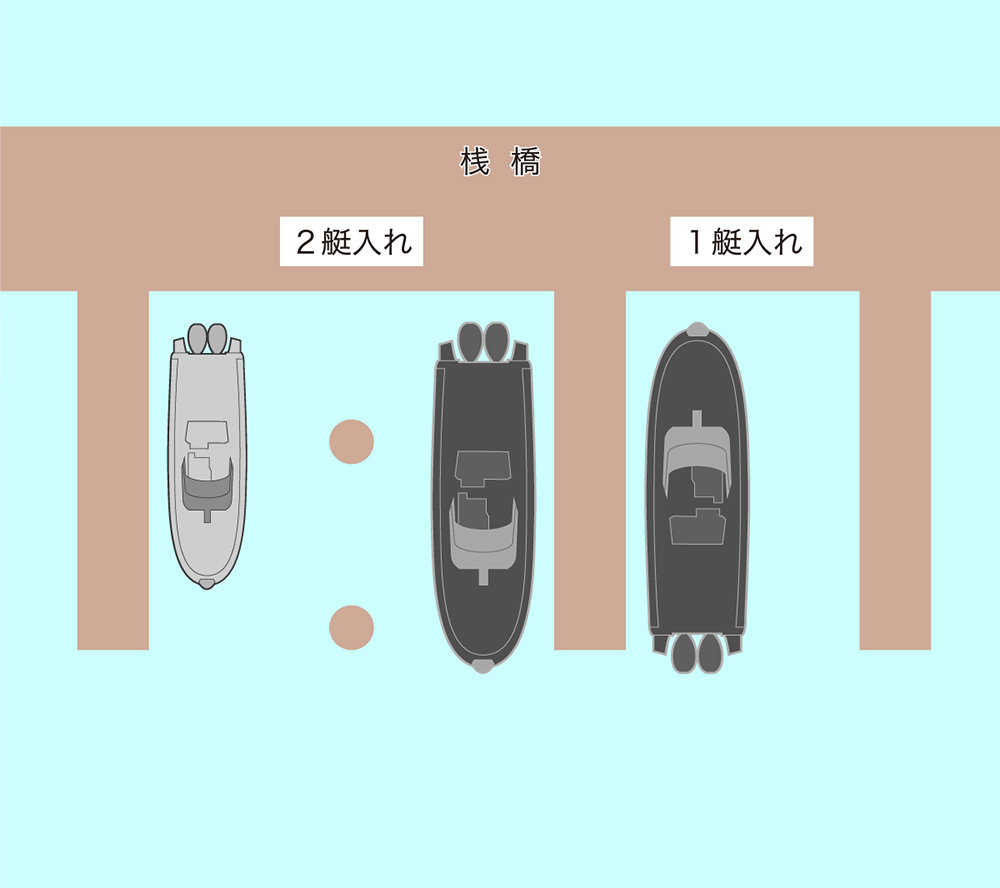
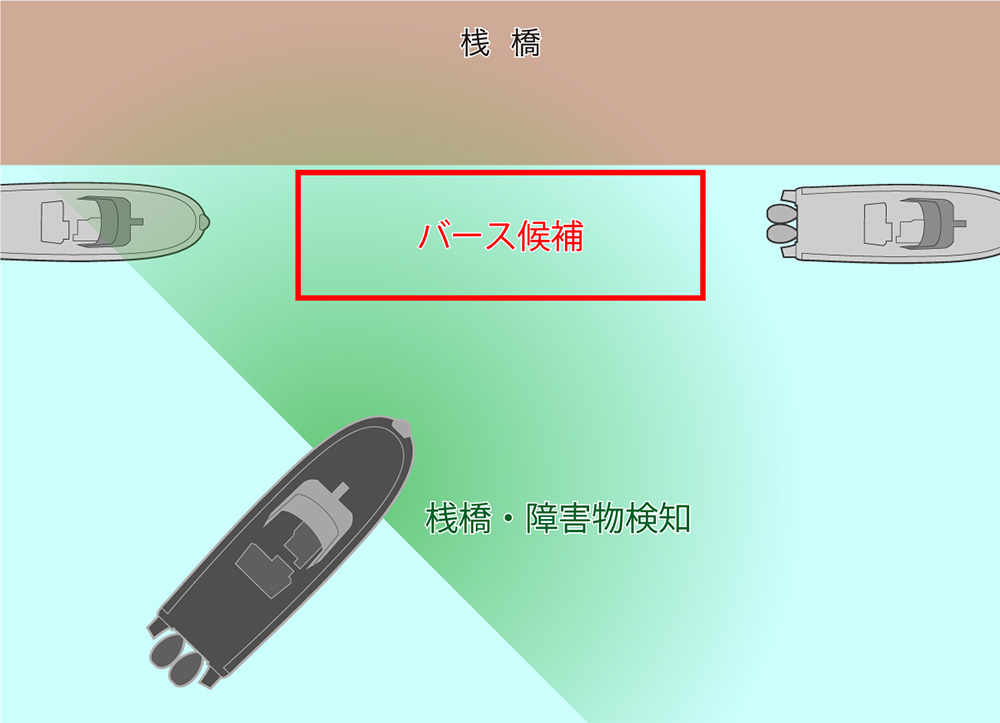
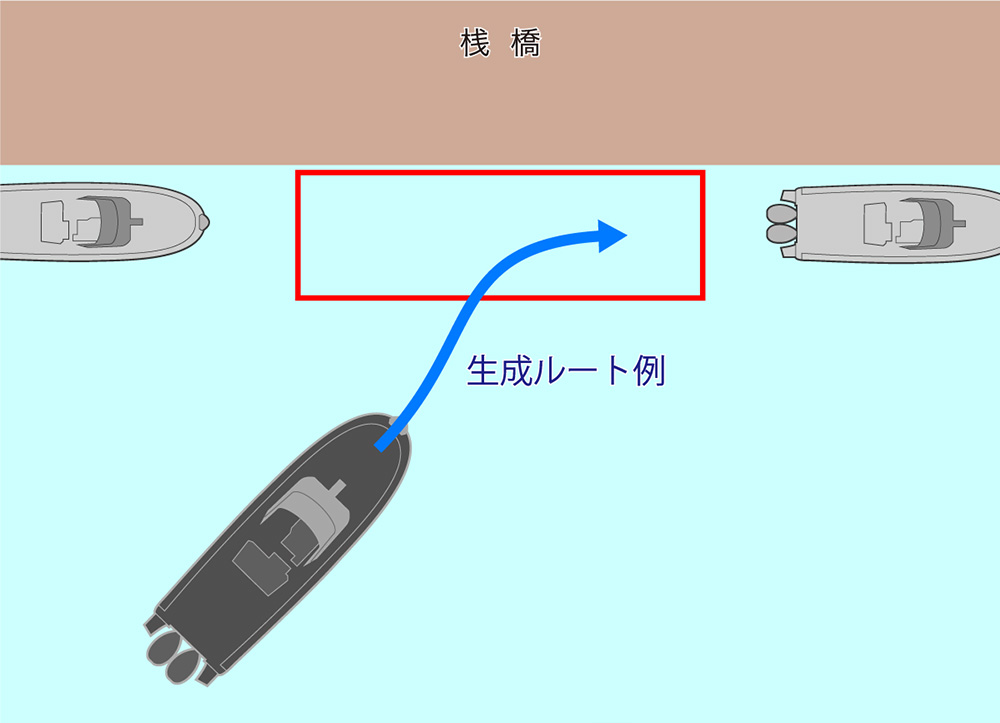
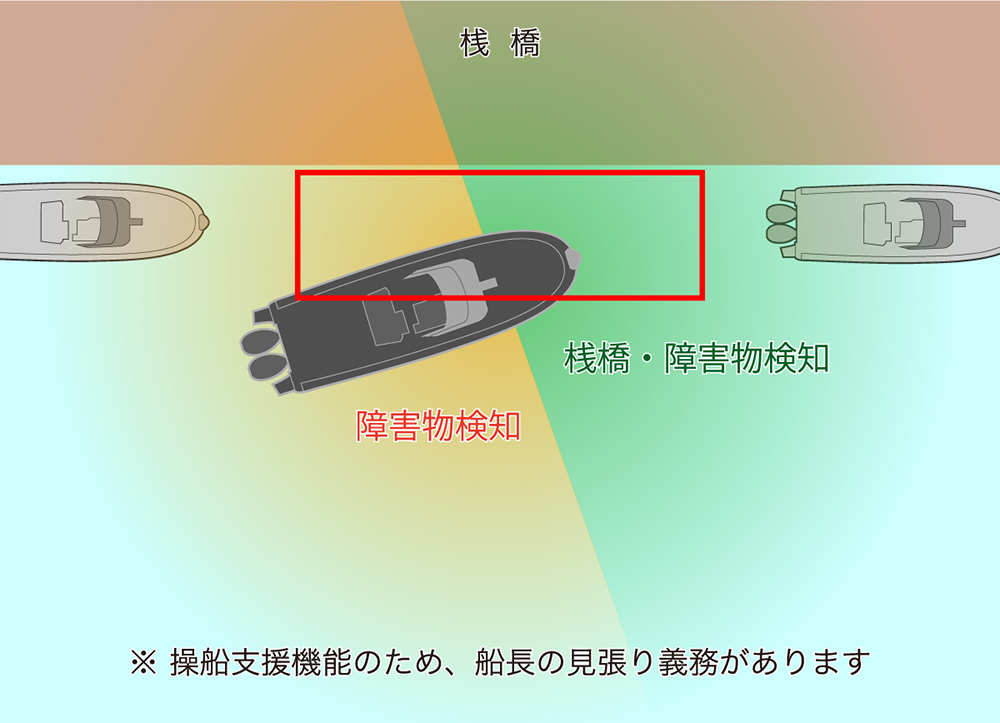
システムが各種センサーからの情報を基に、自艇の位置を正確に推定するとともに、障害物や空きバースを認識。自艇のサイズを考慮したバース候補を複数提示します。ユーザーが希望するバースを選択すると、バースまでのルートを生成した上で、自動操船を開始。障害物を検知した場合は自動で停止します。
作動イメージ
着桟モードを設定し、停めたい桟橋に手動操船で接近
認識範囲まで近づくとバース候補をディスプレイに表示
タッチパネルで希望のバースを選択
自動生成されたルートをディスプレイに表示
決定すると自動着桟開始
桟橋や障害物の検知を行いながら、
自動操船で指定のバースに着桟
■自動着桟システムにおいて、使用可能な条件から外れる場合は、警報を発して直ちにユーザーに操船交代をすることが求められます。
■自動着桟システムは、ユーザーの操船支援機能のため、各機能の能力(認識能力・制御能力)には限界があり、作動しない場合や十分に性能を発揮できない場合があります。
自動トレーラーローディングシステム
着桟と同様に難易度が高いとされるトレーラーローディングも自動で行うことができます。着桟モード設定でトレーラーローディングを選択すると、トレーラーに設置した2次元コード(2D コード)をカメラで認識し、風や潮の流れを推定しながら自動操船。進入角度も認識できるため、角度を調整しながらまっすぐレールに乗るよう軌道を補正します。

トレーラーに目印となる2次元コード(2Dコード)を設置
■自動トレーラーローディングシステムにおいて、使用可能な条件から外れる場合は、警報を発して直ちにユーザーに操船交代をすることが求められます。
■自動トレーラーローディングシステムは、ユーザーの操船支援機能のため、各機能の能力(認識能力・制御能力)には限界があり、作動しない場合や十分に性能を発揮できない場合があります。
Hondaは自由な移動の喜びを、環境負荷ゼロ、交通事故死者ゼロで達成し、多くの人の夢の実現を後押しするような、社会を前進させる原動力となる企業でありたいと願っています。それはクルマやバイクに限ったことではなく、マリン領域においても同様です。四輪で培った先進安全技術を活用し、操船支援技術の開発に取り組むことで、水上のさらなる安全性・快適性向上を図ります。そして、水上での完全自動運転技術の確立に向けて、本技術で着実な一歩を踏み出します。