
ƒCƒ“ƒeƒٹƒWƒFƒ“ƒgپEƒٹƒAƒ‹ƒ^ƒCƒ€پEژ©چف•àچsپui-WALKپv
intelligent Real time Flexible Walking = i-WALK
intelligent Real time Flexible Walking = i-WALK
- i-WALK‹Zڈp‚ئ‚حپA‰—ˆ‚ج•àچsگ§Œن‹Zڈp‚ةپu—\‘ھ‰^“®گ§Œن‚ً‰ء‚¦‚ؤپA‚و‚èژ©چف‚ب•àچs‚ًژہŒ»‚µ‚½ژ©—¥“ٌ‘«•àچs‚جگV‚µ‚¢ƒLپ[ƒeƒNƒmƒچƒWپ[‚إ‚·پB‚±‚ê‚ة‚و‚èپAASIMO‚إ‚حپA‰—ˆ‚ج•à‚«•û‚إ‚حژہŒ»‚·‚邱‚ئ‚ج‚إ‚«‚ب‚©‚ء‚½‚و‚èژ©‘R‚إƒXƒ€پ[ƒY‚ب“®‚«‚ھ‰آ”\‚ئ‚ب‚è‚ـ‚µ‚½پB
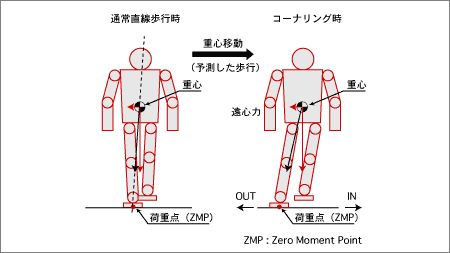
- ▌—\‘ھ‰^“®گ§Œن‚ًژہŒ»‚µ‚ـ‚µ‚½
- گlٹش‚ھ’تڈي‚ج’¼گü•àچs‚©‚çٹp“x‚ج‚«‚آ‚¢ƒRپ[ƒiپ[‚ً‹ب‚ھ‚낤‚ئ‚·‚é‚ئ‚«پAژ–‘O‚ةگg‘ج‚جڈdگS‚ًƒRپ[ƒiپ[‚ج“à‘¤‚ةˆع“®‚³‚¹‚ـ‚·پBASIMO‚حi-WALK‚ج‹Zڈp‚ج“±“ü‚ة‚و‚èپAڈ]—ˆ‚ج•àچsگ§Œن‹Zڈp‚إ‚ح’Bگ¬‚إ‚«‚ب‚©‚ء‚½پAژں‚جپiڈ«—ˆ‚جپj“®‚«‚ًƒٹƒAƒ‹ƒ^ƒCƒ€‚ة—\‘ھ‚µ‚ؤ‚ ‚ç‚©‚¶‚كڈdگS‚ًˆع“®‚³‚¹‚é‹@”\‚ًژہŒ»‚µ‚ـ‚µ‚½پB
- 1. ˆê’U’âژ~‚ًٹـ‚ـ‚ب‚¢کA‘±ˆع“®‚ھ‰آ”\‚ئ‚ب‚è‚ـ‚µ‚½
‚¢‚©‚ب‚éڈuٹش‚©‚ç‚إ‚àپAکA‘±‚©‚آژ©چف‚ة•à‚«•û‚ً•دچX‚·‚邱‚ج‚إ‚«‚éˆع“®‚ھ‰آ”\‚ئ‚ب‚ء‚½‚½‚كپA‘f‘پ‚ƒXƒ€پ[ƒX‚ب“®‚«پi•à‚«پj‚ھڈo—ˆ‚é‚و‚¤‚ة‚ب‚è‚ـ‚µ‚½پB
- 2. ’…’nˆت’uپEگù‰ٌٹp‚¾‚¯‚إ‚ب‚پA•àچsژüٹْ‚à”Cˆس‚ة•دچX‰آ”\
- P3‚ـ‚إ‚جƒچƒ{ƒbƒg‚حپAگù‰ٌ‚ب‚ا‚ج“®‚«‚ًپA‹L‰¯‚³‚ê‚ؤ‚¢‚½•àچsƒpƒ^پ[ƒ“‚ج‘g‚فچ‡‚ي‚¹‚ئچ‡گ¬‚إچs‚ء‚ؤ‚¢‚ـ‚µ‚½پBASIMO‚حپAƒٹƒAƒ‹ƒ^ƒCƒ€‚ة•àچsƒpƒ^پ[ƒ“‚ًگ¶گ¬‚µپA”Cˆس‚ة’…’nˆت’u‚ئگù‰ٌٹp‚ً•دچX‚·‚邱‚ئ‚ھ‚إ‚«‚ـ‚·پB‚±‚ê‚ة‚و‚肳‚ـ‚´‚ـ‚ب•ûŒü‚ض‚ج•àچs‚ً‚و‚èƒXƒ€پ[ƒX‚ب“®‚«‚إژہŒ»‚µ‚ؤ‚¢‚ـ‚·پB‚ـ‚½پA•àچsژüٹْپiˆê•à‚جژٹشپj‚ً”Cˆس‚ة•دچX‚إ‚«‚邽‚كپA“®‚«‚ة•sژ©‘R‚³‚ھ‚ب‚‚ب‚è‚ـ‚µ‚½پB
- ▌i-WALK‚جڈ«—ˆگ«
- i-WALK‹Zڈp‚ة‚و‚èپAASIMO‚حپA‚¢‚©‚ب‚éڈuٹش‚©‚ç‚إ‚àپAکA‘±“I‚©‚آژ©چف‚ة•à‚«•û‚ً•دچX‚·‚邱‚ئ‚ھ‚إ‚«‚é‚و‚¤‚ة‚ب‚è‚ـ‚µ‚½پBi-WALK‹Zڈp‚حپAƒچƒ{ƒbƒg‚ھگlٹش‚جگ¶ٹˆ‹َٹش‚إ‹¤‘¶‚·‚é‰آ”\گ«‚ً‚و‚èچ‚‚ك‚é‹Zڈp‚إ‚·پB‚±‚ج‹Zڈp‚ھ”“W‚·‚邱‚ئ‚إپAڈ«—ˆƒچƒ{ƒbƒg‚حپAگl‚ةچ‡‚ي‚¹‚ؤژ©چف‚ةٹˆ“®‚·‚鋦’²چى‹ئ‚ًچs‚ء‚½‚èپAڈلٹQ•¨‚ًژ©‚ç‰ٌ”ً‚·‚邱‚ئ‚ھ‚إ‚«‚é‚و‚¤‚ة‚ب‚è‚ـ‚·پB