P2が「IEEEマイルストーン」に認定
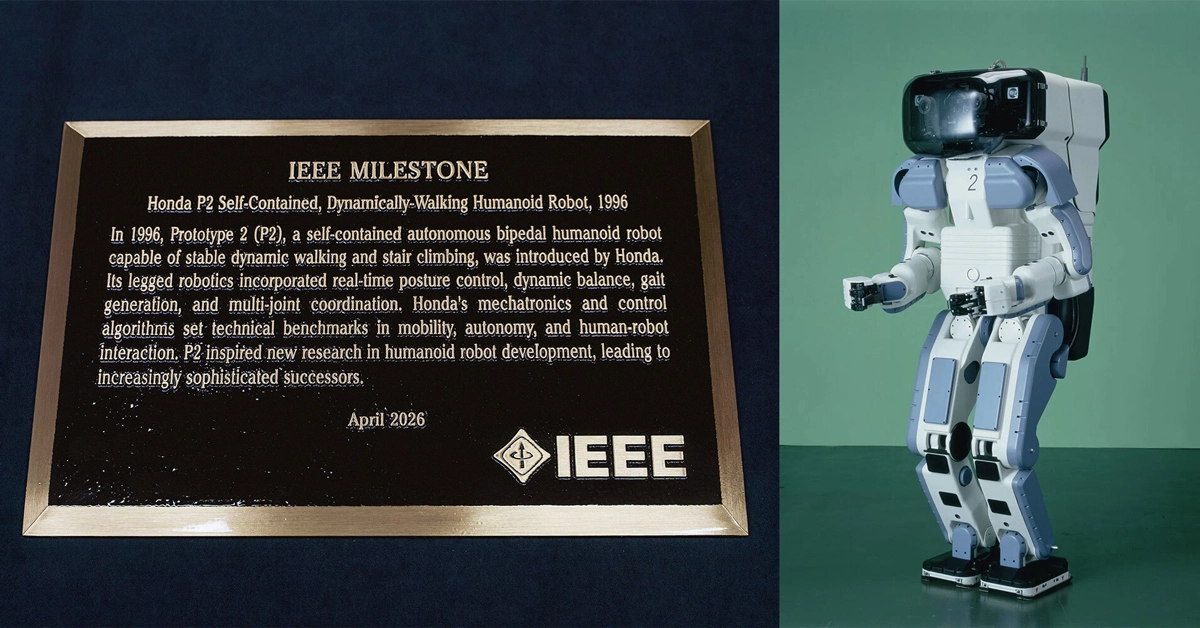
人に役立ち、人のパートナーとなることを目指して、Hondaは1986年に人間型ロボット(ヒューマノイドロボット)の研究をスタート。二足歩行の原理究明から始まり約10年の時を経て、1996年に二足歩行機構と双腕機構を実現した人間型ロボット、P2を発表しました。Hondaのロボティクス技術を大きく前進させたP2。その実現は4年後のASIMO誕生はもとより、今日に至る世界のロボット開発の発展において重要な技術成果として高く評価され、2026年4月「IEEE(アイ・トリプル・イー)※1マイルストーン」に認定されました。
社会や産業の発展に貢献した歴史的業績を表彰する「IEEEマイルストーン」認定
「IEEEマイルストーン」認定は、電気・電子・情報・通信分野において開発から25年以上経過し、地域社会や産業の発展に多大な貢献をしたとされる歴史的業績をIEEEが認定する制度。P2は、人間とロボットのインタラクションにおける技術ベンチマークを確立するとともに、ヒューマノイドロボット開発における国際的な研究を促進させ、より洗練された後継機の開発につながったという功績が認められました。なお、2026年4月28日にHonda和光ビルにて認定の記念式典が行われ、IEEEより銘板が贈呈されました。また、Hondaとしてはナビゲーションシステムの世界標準を築いた「ホンダ・エレクトロ・ジャイロケータ」(2017年認定)に次いで2回目の認定となりました。
※1 IEEE(Institute of Electrical and Electronics Engineers)は、米国に本部を置く、電気・電子・情報・通信分野における世界最大の学会。世界190ヵ国以上に53万人を超える会員を擁する非営利団体で、コンピューター、バイオ、通信、電力、航空、電子などの技術分野で指導的な役割を担っています。
世界に衝撃を与えたP2の登場
P2が発表された1996年当時、ロボットといえば自動車製造における溶接、塗装、および電子部品の組み立てなどといった「固定された」産業向け装置が実用化されている一方、移動を伴うロボット研究においては、四足あるいはそれ以上の多脚歩行ロボットや車輪付きロボットが研究の中心でした。二足歩行の自律制御は以前より研究されていたものの、動的バランス制御の複雑さのため実現は困難と考えられ、主要なテーマとはなっていませんでした。
こうした状況の中、1996年12月にHondaが公開したP2のデモンストレーション映像は、世界のロボット研究者や産業界に大きな衝撃を与えました。
P2は、コンピューターや電源も内蔵した、世界初の自律二足歩行ロボットであるとともに、当時の二足歩行ロボットの技術として一般的であった「静歩行」とは異なり、Honda独自の歩行制御技術により、それまで不可能とされた、人間のように自然な歩行動作を実現。また、様々な路面状況や外力を推定する制御技術により姿勢の安定化を図るとともに、 脚の動きをリアルタイムで生成することで、段差のある路面や傾斜地の歩行、さらには階段の昇降までも可能にしていました。
このようにP2の登場は、ロボット工学分野における歴史的な一歩となりました。ヒューマノイドロボットはもはや空想上のものではないことを実証し、世界中の大学、民間企業、政府機関がヒューマノイドロボット研究を加速させるモチベーションを与えるとともに、ロボットが産業タスクに最適化された機械から、人のパートナーとして社会的な役割を果たす大きな可能性を提示しました。
独自技術を積み上げることで「自律二足歩行」を実現
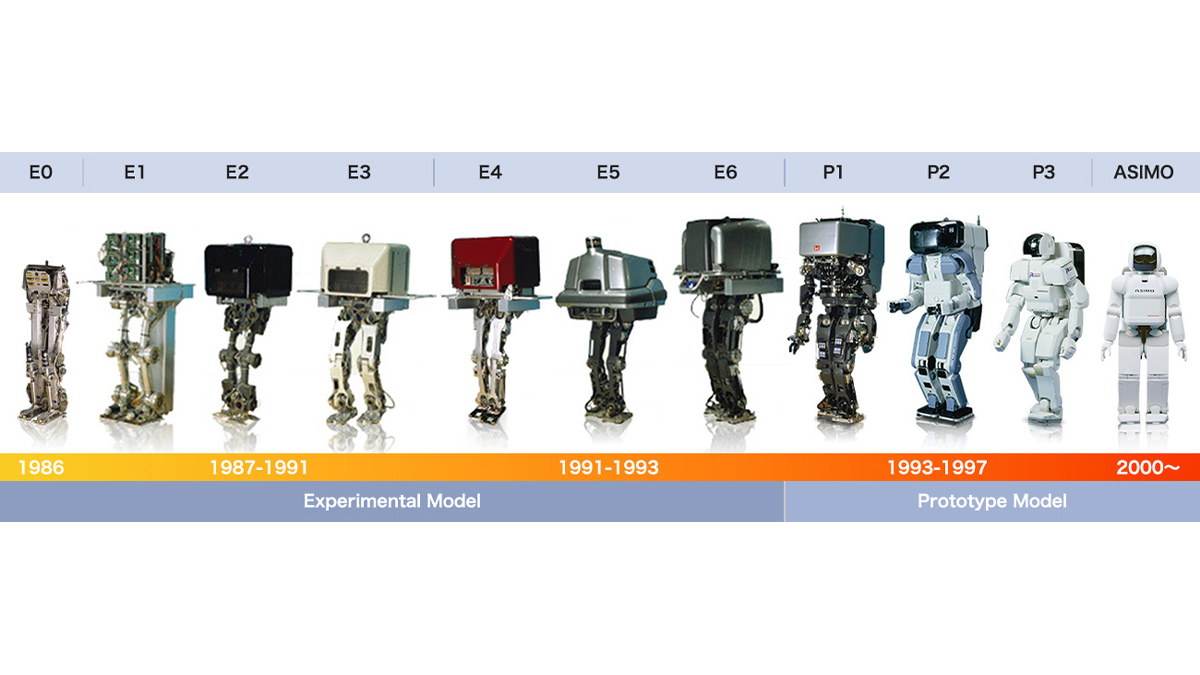
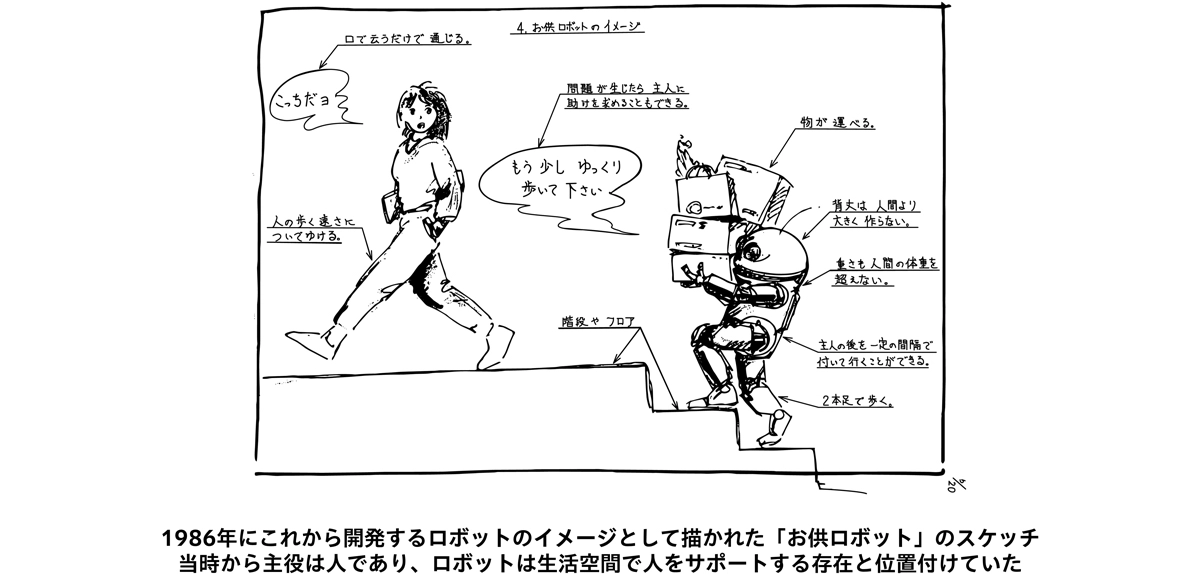
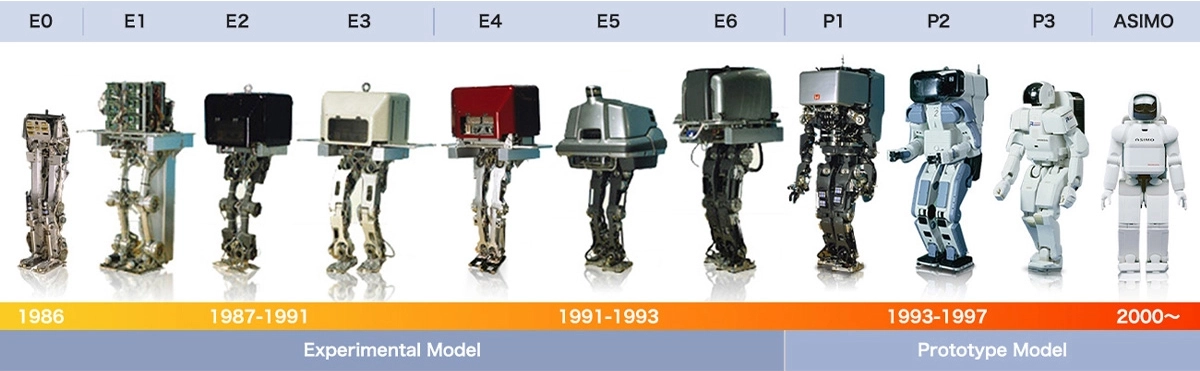
1986年にスタートしたHondaのヒューマノイドロボット研究は、まず人間社会で使えるロボットのあるべき姿を模索することから始まりました。その結果、ロボットの機能としては屋内で、限られた空間の中を行き来することや階段の昇り降りなどの動作が必要であり、それには人間と同様な二足歩行が適していると考えました。こうして、当時は困難であると言われていた、「自律二足歩行ロボット」という高い目標に向けて革新的な技術を積み上げていきました。
人間と同じような「動歩行」技術(1986年~1991年)
常に身体の重心が足裏の範囲に入るように歩く、ゆっくりとした「静歩行」からスタートした二足歩行技術の開発。人間と同じようなスムーズな「動歩行」を実現するために、人間だけでなく動物を含め、あらゆる歩行の研究・解析を行い、二足歩行に必要な関節の配置や動きを調べました。そして、E2で時速1.2km/hの動歩行に成功しました。
歩行安定化技術を確立(1991年~1993年)
さらに安定した歩行を実現するために、「床に凹凸があっても倒れない」「押されても倒れない」「階段や斜面でも安定して歩行ができる」ことに対応する3つの姿勢制御を開発。歩くメカニズムを確立し、階段や斜面でも安定した二足歩行を実現しました。
ヒューマノイドロボットへの進化(1993年~1997年※2)
二足歩行技術を確立した後、脚部と双腕を組み合わせたヒューマノイドロボットへの技術開発に着手しました。その最初のプロトタイプモデルとなるP1では、電源、コンピューターは外置きながら、スイッチのオン・オフ、扉の取っ手つかみ、ものを掴んで運搬するなどの動作を実現。腕と脚の協調した動きの研究が行われました。
そして、P1の後継機として開発したP2は、必要な機器をすべて内蔵し、自在な歩行、階段の昇降、台車を押すなどの動作をワイヤレスかつ自動動作により実現しました。
※2 P2は1996年に発表。1997年にP3が完成
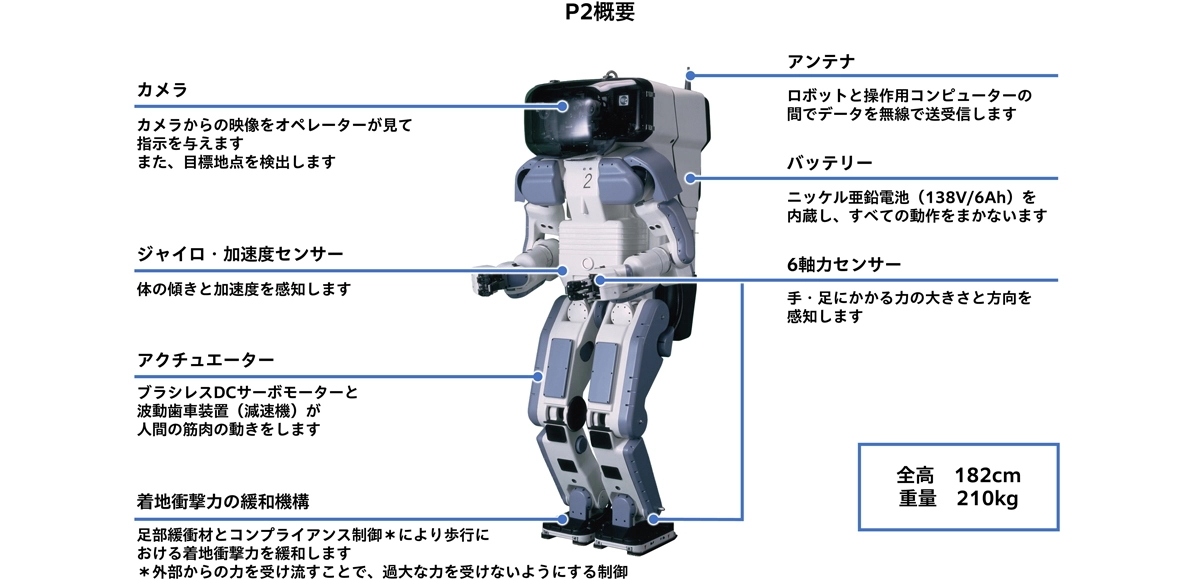
P2の基本機能
●階段昇降
6軸力センサーを用いて踏みしろを推定することにより、長い階段でも踏み外すことなく連続的に昇降することができます。
●台車押し
台車を一定速度で押して進もうとしますが、何らかの影響で台車の動きが抑圧されると、これに応じて無理がかからないように歩幅を小さくします。
●遠隔操縦による作業
マスターアームを用いて、ハンドに作用する反力を感じながら、ボルト締めなどの作業を行うことができます。
二足歩行の技術水準を大きく引き上げた「大局的姿勢安定化制御」
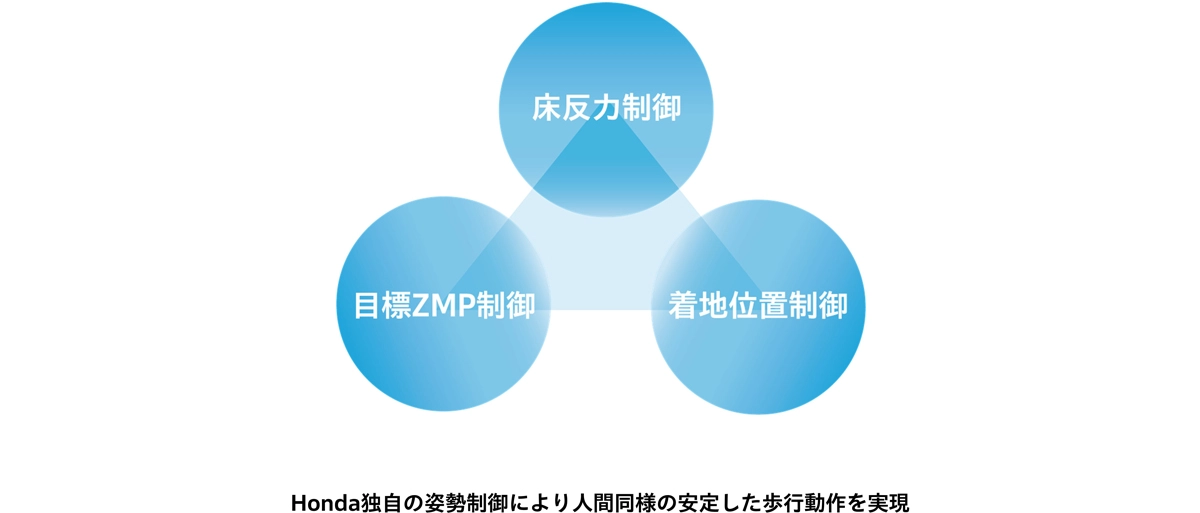
人間同様の安定した歩行動作を実現したP2。その核となるのが、「床反力制御」「目標ZMP※3制御」「着地位置制御」という3つの制御で構成される「大局的姿勢安定化制御」です。E6に初めて適用し、P2では腕を含めた上体との協調動作も行っています。
※3 ZMP=Zero Moment Point:「総慣性力」のモーメントが「0」となる点
ロボットの歩行時に働く基本力学
ロボットが歩行しているとき、ロボットには地球からの「重力」と歩行の加減速によって生じる「慣性力」が働いています。これらの合力である「総慣性力」の軸と地面との交点は、「総慣性力」のモーメントが「0」となるため、ZMP(Zero Moment Point)と呼ばれています。一方、ロボットの着地している足には地面からの反作用として「床反力」が働き、その作用する点を「床反力作用点」といいます。
基本的にロボットは理想の歩行パターンをコンピューターで生成し、これに従うように関節を動かして歩きます。理想の歩行パターンの総慣性力を「目標総慣性力」、理想の歩行パターンのZMPを「目標ZMP」と呼びます。
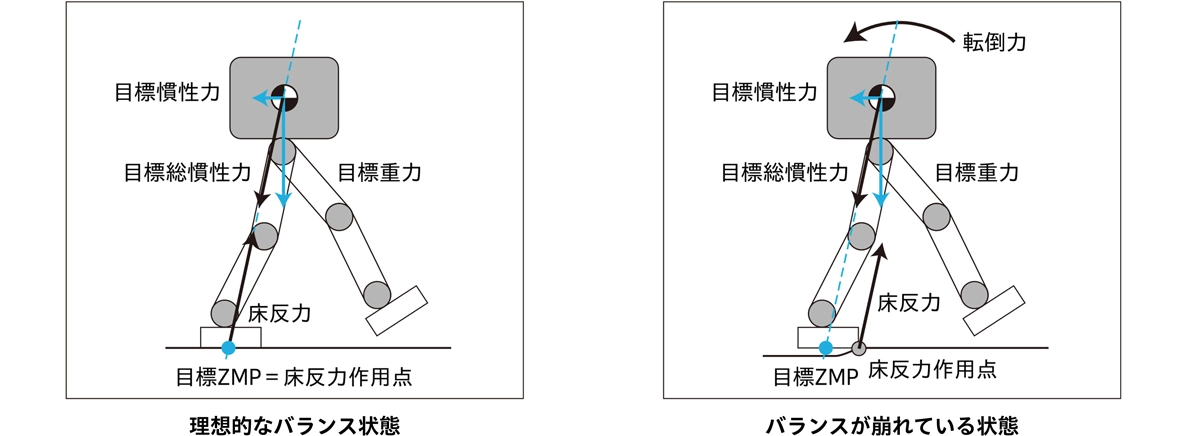
ロボットが理想的なバランスを保って歩行をしているときには、「目標総慣性力」と「実際の床反力」の軸は一致しています。したがって、「目標ZMP」と「実際の床反力作用点」は一致しています。
これに対して、地面の凹凸などを踏んだ場合、「目標総慣性力」と「実際の床反力」の軸がずれてバランスを崩し、転倒力が発生します。この転倒力は「目標ZMP」と「実際の床反力作用点」のズレにほぼ比例するため、バランスを崩す最大の原因となります。
人間であれば倒れそうになったときに、まずは足裏を床に押しつけて踏ん張り、例えば前方に倒れそうになるとつま先で踏ん張る。それでも堪えきれなければ足を前に出すという一連の動作を自然に行っています。Hondaが開発した3つの姿勢制御は、この人間の動作のように働き、安定した姿勢を保ちます。
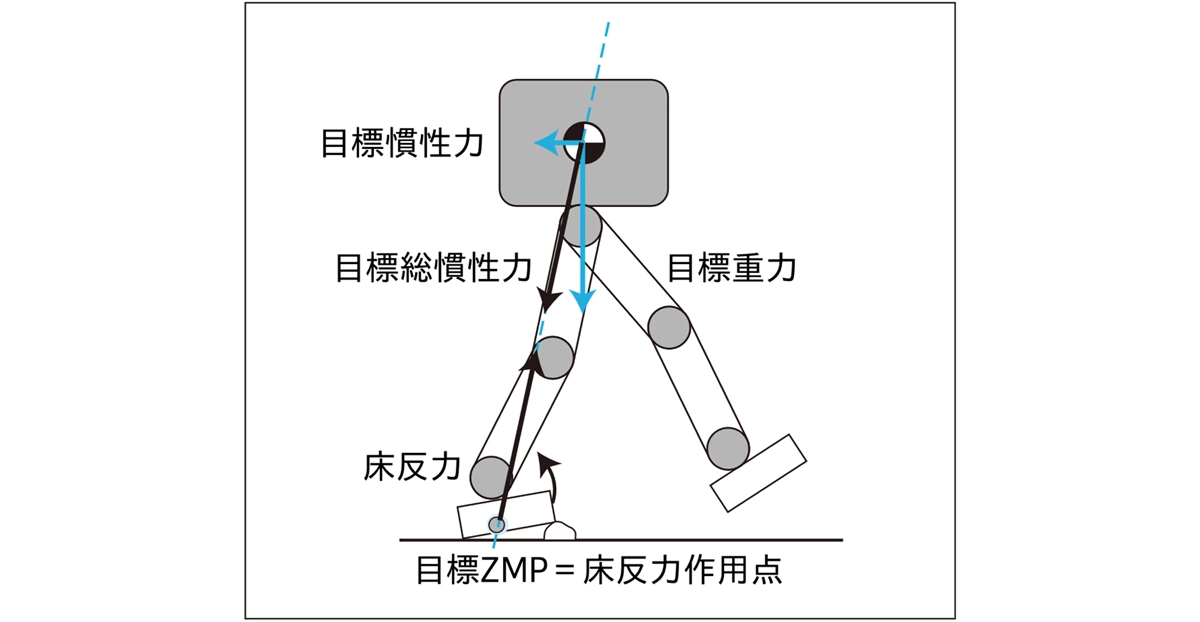
床の凹凸を吸収しながら、足裏で踏ん張る「床反力制御」
倒れそうになったときに足の裏で踏ん張る制御です。例えば、ロボットがつま先で石を踏んだ場合、「実際の床反力作用点」はつま先側にずれますが、このときに床反力制御は、つま先側を少し持ち上げて「実際の床反力作用点」を「目標ZMP」まで戻します。また例えば、何らかの原因でロボットが前傾してしまったときには、つま先を下げて踏ん張ることにより、「実際の床反力作用点」を前にずらし、姿勢復元力を発生させます。ただし、「実際の床反力作用点」は足裏接地面の範囲から越えることができないので、姿勢の復元力には限界があり、ロボットが大きく傾いた場合には転倒してしまいます。
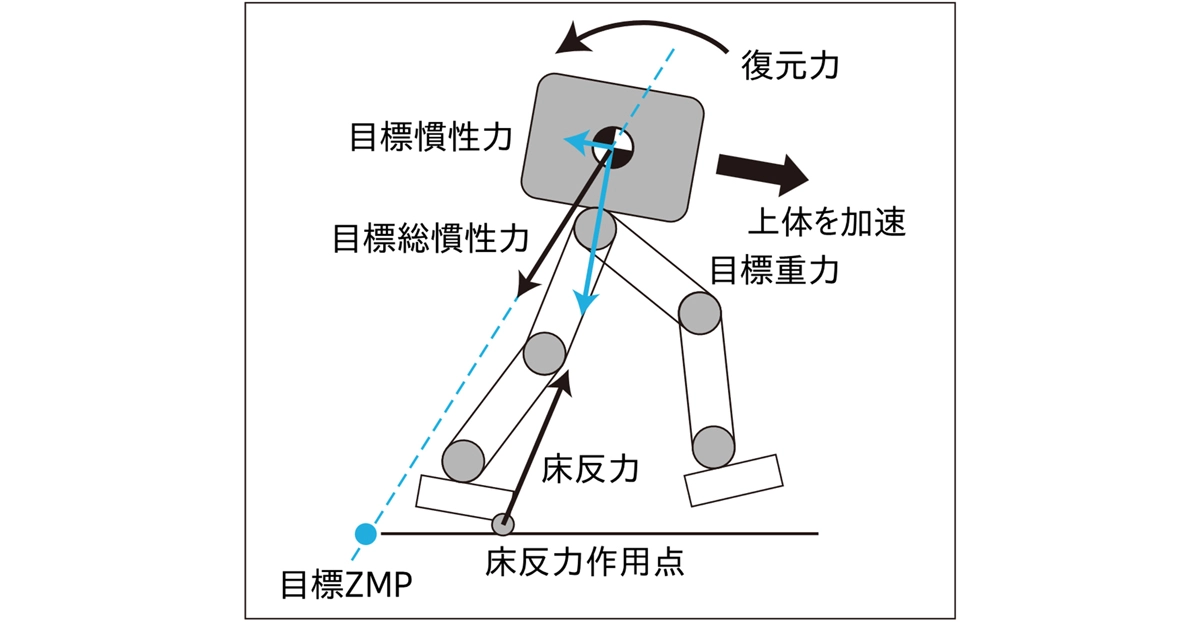
足裏で踏ん張りきれないときに、上体を倒れそうな向きに加速させ姿勢を保つ「目標ZMP制御」
ロボットが大きく傾いた場合には、さらに「目標ZMP制御」が働いて転倒を防ぎます。前述のように、「目標ZMP」と「実際の床反力作用点」のズレによって転倒力が発生する一方、「目標ZMP制御」は、この転倒力を逆に積極的に活用することで安定化を図る制御です。
具体的には、例えば前方に倒れそうな場合には、ロボットの上体を理想の歩行パターンよりもー層強く前方に加速させます。この結果、「目標ZMP」が「実際の床反力作用点」よりも後方に移動するため、後ろに倒そうとする力が働き、姿勢の傾きが戻ります。
電車に立って乗車している際に、電車が加速すると後方に倒す力を受けるのと同じ原理で、慣性力を利用した制御です。
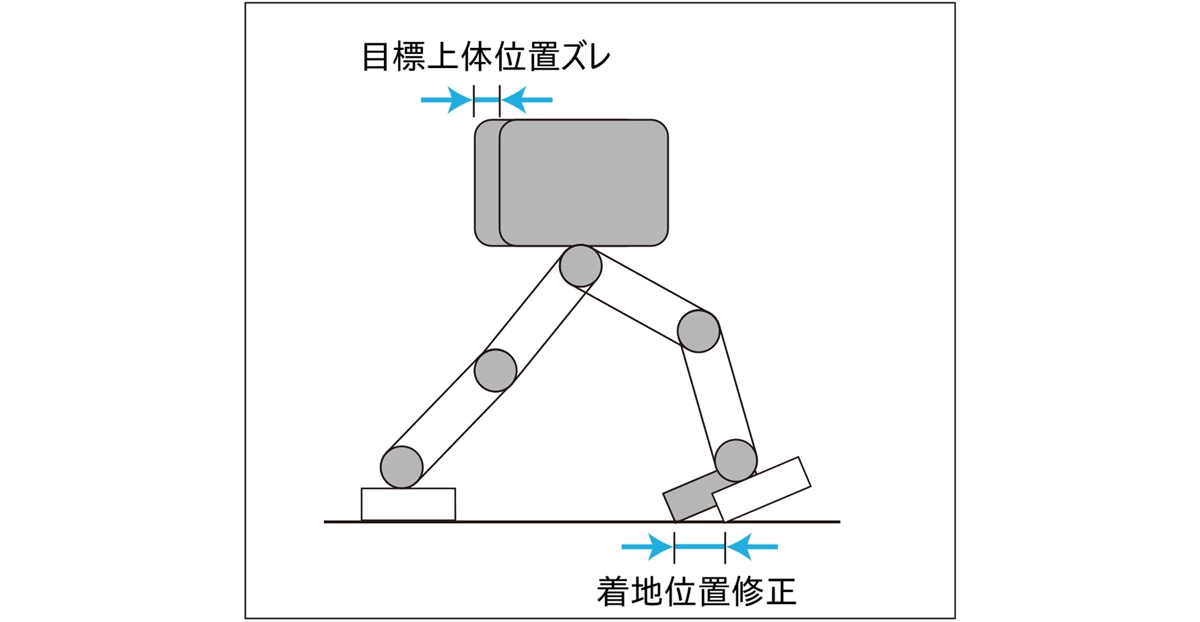
目標ZMP制御によって生じた上体のズレを歩幅によって調整する「着地位置制御」
「目標ZMP制御」が働くと、目標としていた上体の位置が、より強く加速した方向にずれてしまいます。このとき、いつもと同じ歩幅(理想の歩幅)で次の足を出すと、上体に対して足が取り残されてしまうため、「着地位置制御」によって歩幅を適切に修正して、上体と足の理想的な位置関係を取り戻します。
ASIMOで結実したHondaのヒューマノイドロボット
P2で確立した「二足歩行機構による移動」と「双腕機構による作業」という基本構成と、「階段昇降」「台車押し」などの基本機能を踏襲したうえで、部品の材質の見直しや、分散型の制御を取り入れて小型化・軽量化を行い、プロトタイプモデルはより人間に近いサイズのP3に進化しました。
さらに、人の生活空間での活動を想定した研究・開発を推進。人のパートナーとして役立つサイズや重量、親しみやすいデザインとするとともに、予測運動制御を加えて人の歩き方により近い自然でスムーズな歩行を実現した、ヒューマノイドロボットASIMOを2000年に発表しました。
ASIMOはその後も進化を続け、2002年に音声認識や画像認識により、人の姿勢やしぐさの意味を理解して自律的に行動できる知能化技術を搭載。2005年にはオフィスなど実際の環境で作業する能力を強化するとともに、走ることも可能になりました。2007年には複数ASIMOによる連携作業を可能にし、2011年には自律性をいっそう高めるとともに時速9km/h走行など身体能力を強化したほか、水筒のフタを開けてコップに液体を注ぐなどの作業が可能な高機能小型多指ハンドを搭載。2013年にはリスク回避機能を実現するなど、継続して運動能力を高めていきました。
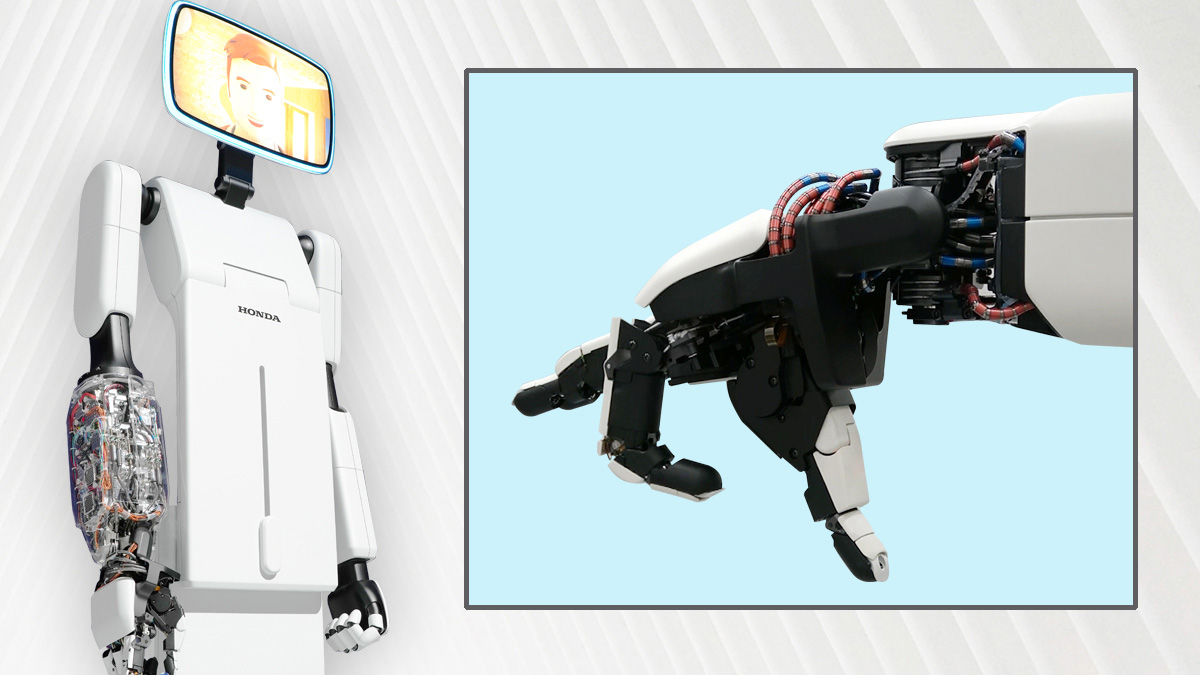
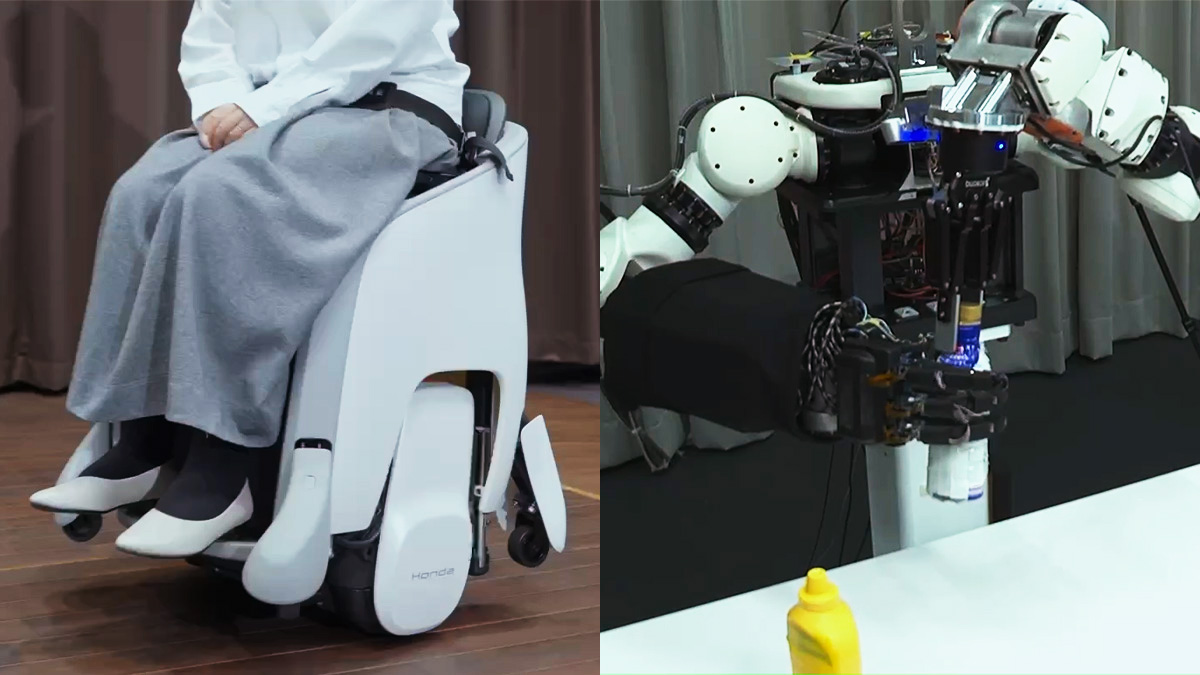
「人の役に立つ」という基本に立ち返り、Hondaは次なるステップへ
Hondaは、P2、P3、ASIMOで得られたヒューマノイドロボットの知見を活かし、ロボティクス技術を次のステップへと進めています。人の役に立つロボットをより早く世に出し、より早く価値を提供したいという想いから、多様な能力を持った1体の人間型二足歩行ロボットにこだわるのではなく、個別の機能を持ったさまざまなロボットで、時と場合に応じて人の役に立つという考えです。あくまでも人が主役であり、絞り込んだ機能を持つロボットが一人ひとりに寄り添いサポートすることで、生活の質の向上に貢献する。Hondaはこれからも、生活の可能性を広げるロボティクス技術の研究・開発に取り組んでいきます。