※2004年10月発表の情報
四輪駆動技術 SH-AWDとは
まずはじめに、 SH-AWDとは何かをご紹介しましょう。 クルマが生まれて百年、SH-AWDが登場するまで クルマは曲がる手法に対して“一途”でした。
“一途”とは、
ひとつの手法一本槍だったということ。
クルマは、誕生以来百年、ステアリング操作で曲がっていたのです。
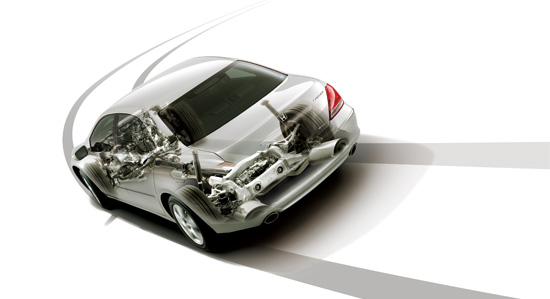
クルマを前進させる「タイヤが路面を蹴る力」=駆動力を
曲がるために活用し、4輪の駆動力を自在にコントロールする
世界で初めての4WD機構。
それがSH-AWD=スーパーハンドリング・オールホイールドライブです。
駆動力でクルマを曲げるSH-AWDの新発想
4つのタイヤでクルマを前進させる4WDは、
力強く前進する様子を、4本の足で走る動物にたとえられます。
その動物の走りをよく観察すると、曲がろうとする外側の
後ろ足を内側よりも強く蹴っていることがわかります。
SH-AWDは、実は外側の後ろ足を強く蹴って
自在に曲がる動物の走りから発想された
クルマの曲がる性能を飛躍的に高める技術なのです。

曲がろうとする外側の後ろのタイヤで 路面を強く蹴って曲がるイメージは、身近な例で わかりやすくたとえると手漕ぎボートで 外側のオールを強くかいて曲がるのと同じです。
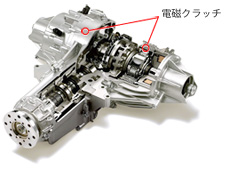
曲がろうとする外側の後輪で内側より強く路面を蹴るSH-AWDのメカニズム
SH-AWDは、4輪に与えられる駆動力を
リアの左右にある、一対の電磁クラッチで
自在に制御しています。
電磁クラッチのつながりを強くした分、
駆動力がその先にある後輪に“流れる”わけです。
その分、前輪の駆動力が減り、結果として
4輪の駆動力が制御されることになります。
曲がるときは、外側になる後輪の電磁クラッチを
より強くつなげばその後輪に多く駆動力が“流れ”、
強く路面を蹴ってくれるわけです。
この簡単な原理によって、
前輪70%:後輪30%〜前輪30%:後輪70%、
後輪左右では、左100%:右0%〜左0%:右100%
の範囲で駆動力を自在に配分します。
SH-AWDにより、2つめの曲がる力を与えられたクルマは、
カーブを曲がる性能が飛躍的に高まります。
その性能アップによりドライバーは、従来より楽に、安定して、
思い描いたラインを狙い通りに曲がることができます。