「五感」に響く技術で磨き上げた、次世代e:HEV
モーターとエンジンの効率を突き詰め、環境性能と走行性能を高い次元で両立するHonda独創の2モーターハイブリッドシステム「e:HEV」は、Hondaの電動化コア技術として進化を続けています。
次世代e:HEVでは、小型モデル用・中型モデル用それぞれにおいて、エンジン、ドライブユニットをはじめとする構成部品および制御技術の刷新を行い、ドライバーの操作にシンクロした制御の追求、電動AWDの採用など「五感」に響く技術によって、更なる環境性能と上質で爽快な走りの向上を目指します。
次世代e:HEVにふさわしいAWDシステム
上質で爽快な走りは、ドライバーが思い描いた通りにステアリングを切りアクセルペダルを踏める優れた走行安定性があってこそ実現でき、その手法の一つに AWD(オールホイールドライビング)があります。
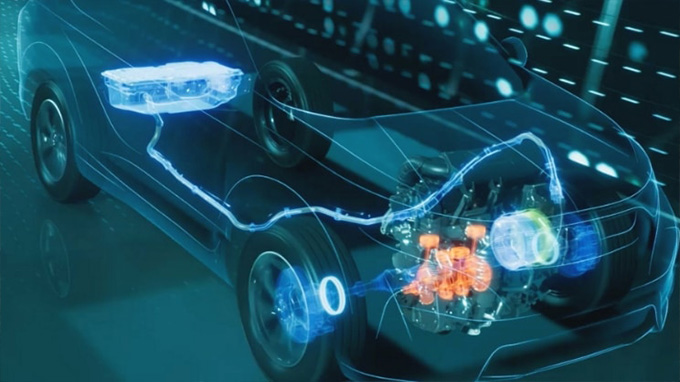
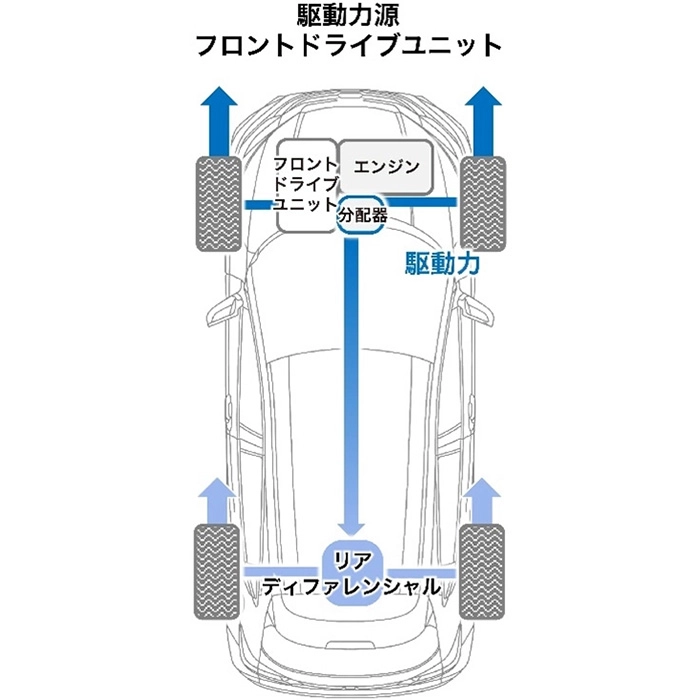
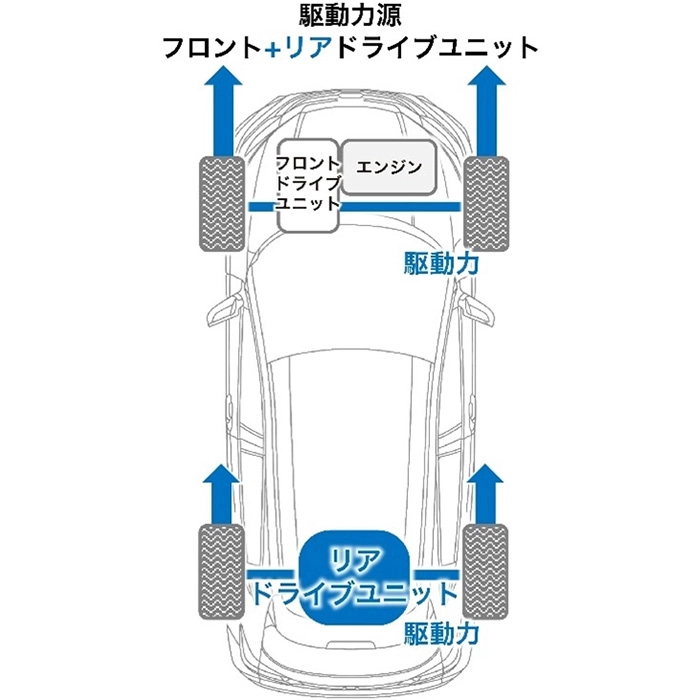
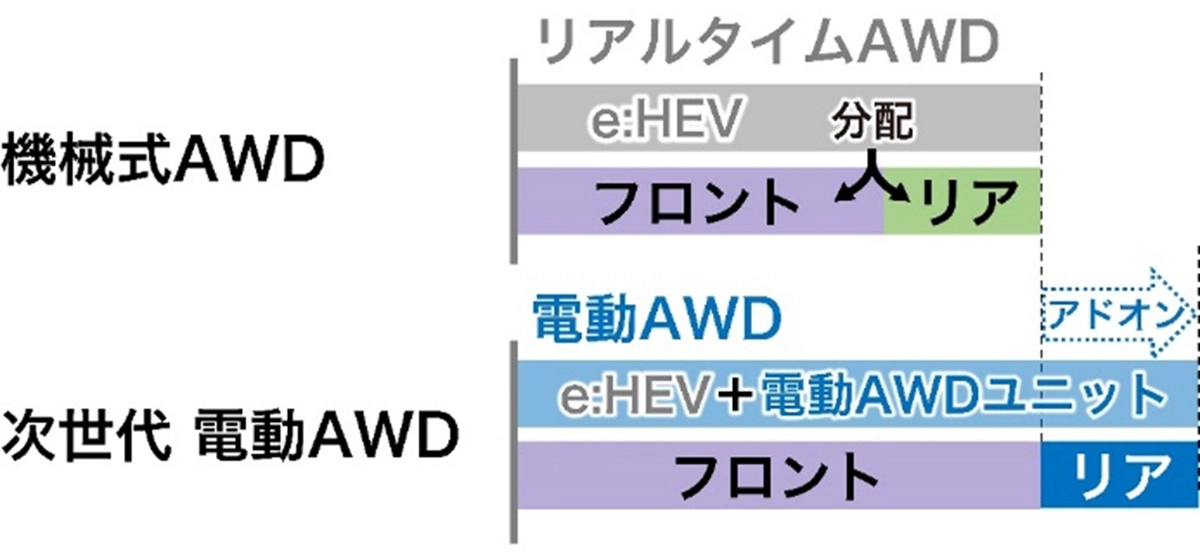
HondaのAWDには従来のシステムで、機械式AWD(HondaリアルタイムAWD など)があり、エンジンなど1つの動力源からの駆動トルクをプロペラシャフトを介して前輪と後輪で分配します。それに対して次世代e:HEVに搭載される電動AWDは、モーターで後輪を駆動するリアドライブユニットを新たに開発。フロントドライブユニットの駆動力に、リアドライブユニットの駆動力をアドオンすることで、より力強い発進加速も可能としています。さらにモーターならではの優れたレスポンスによって、各タイヤのグリップに応じたより緻密な前後駆動力コントロールが可能となり、滑りやすい路面での発進や旋回時の更なる安定性向上に寄与します。
次世代e:HEVに搭載する電動AWDでは、中型モデルまで対応する出力50kWクラスのユニットを採用。高精度・高応答といった電動メリットを最大限に活かした、e:HEVならではの上質で爽快な走りを目指します。
AWDシステムの違い
機械式AWD
電動AWD
次世代e:HEV 電動AWDの駆動力アドオン効果
状況に応じて電動AWDの駆動力をアドオンすることで、より力強い発進加速を実現
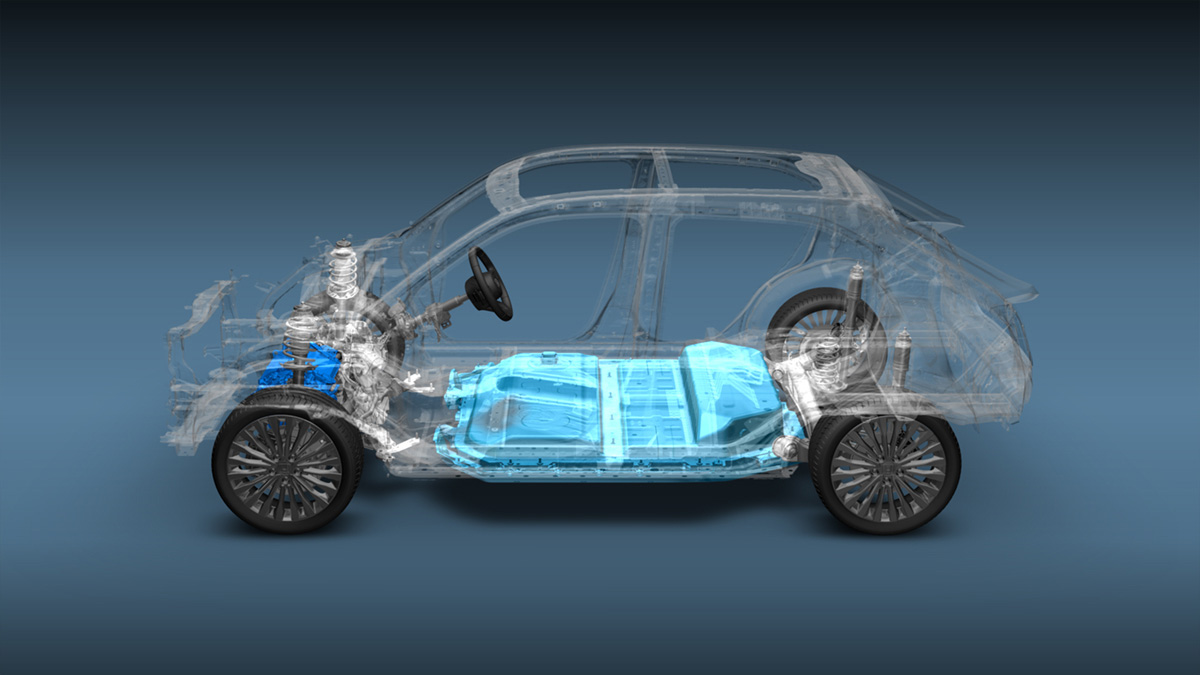
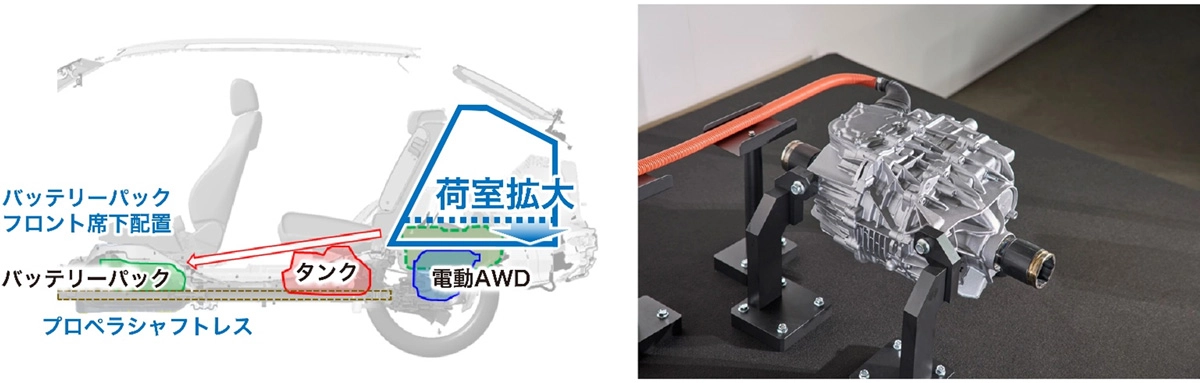
パッケージングにおいても、機械式AWDではプロペラシャフトを配置するために設けていた室内中央部のフロアトンネルを小さくすることが可能となり、よりフラットなフロア構造を実現。後席乗員の快適性を高めるとともに、これまで荷室フロア下に配置していたバッテリーパックをシート下に移動でき、荷室の拡大が図れます。
パッケージ効率の向上(例:次世代小型用電動AWD)
モーターの特性を活かしたAWD制御
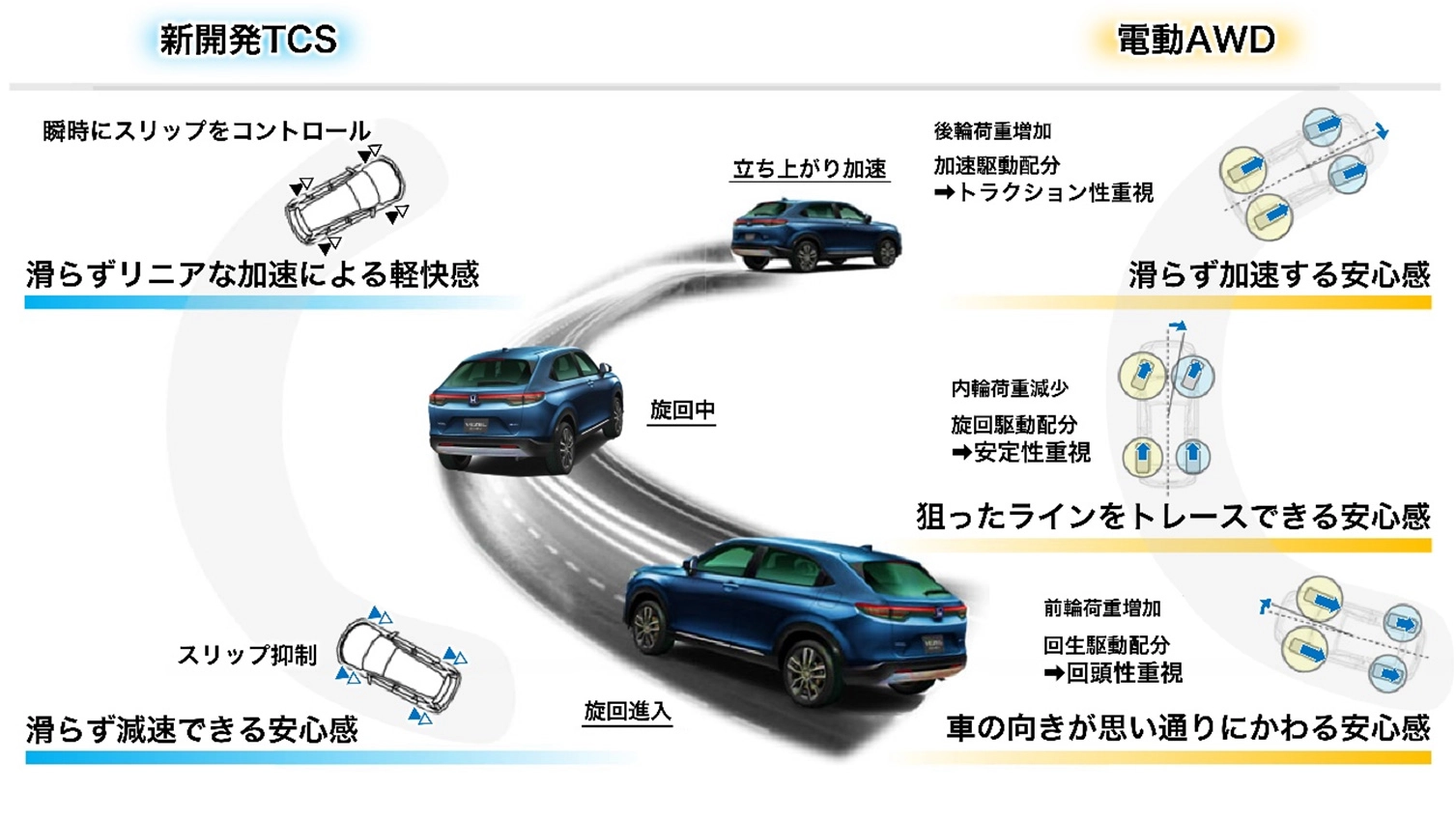
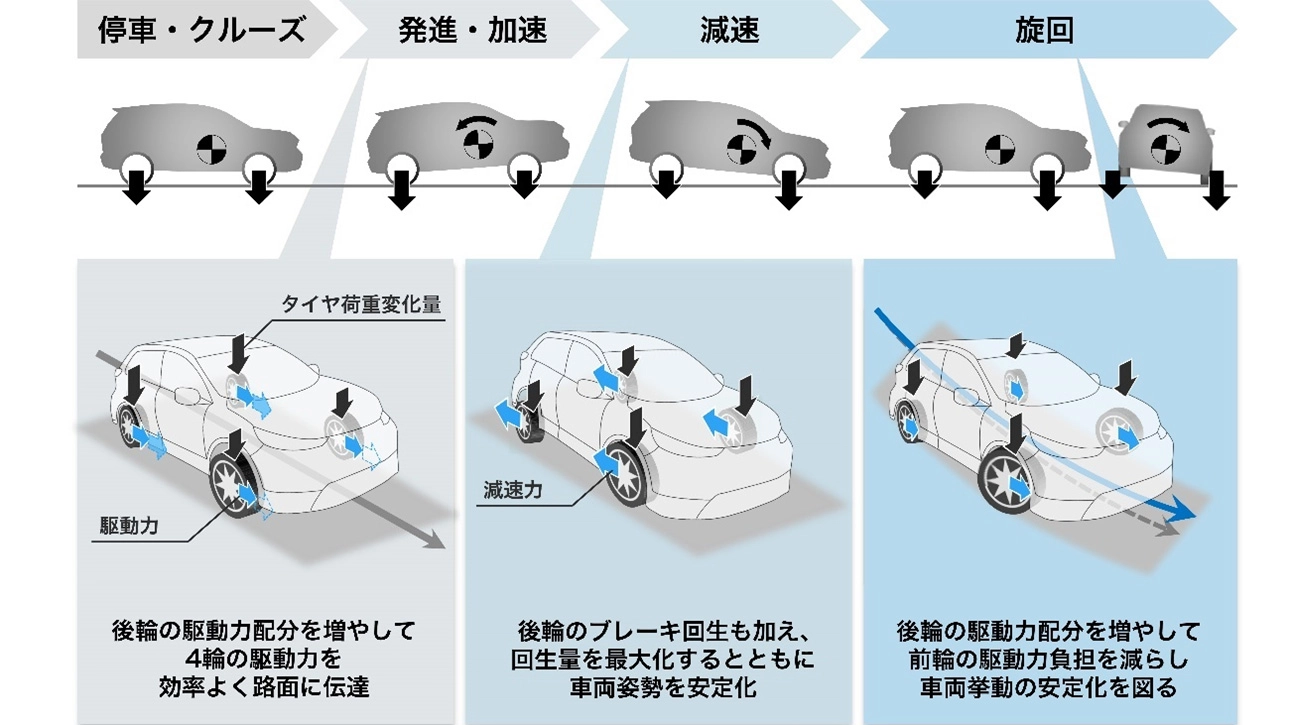
次世代e:HEVの電動AWDは、これまで機械式AWDで培った前後駆動力配分制御を、モーターの特性を活かしてさらに進化させ、タイヤの接地荷重変化に合わせた、よりきめ細かくフレキシブルな駆動力配分を実現しています。後輪側へ荷重移動する発進・加速時には、荷重増加に合わせ後輪の駆動力配分を増やすことで4輪のタイヤグリップを最大限に引き出し、駆動力を効率よく路面に伝達。前下がり姿勢になりやすい減速時には、前輪に加え後輪のブレーキ回生も発生させることで回生量を最大化するとともに、車両のピッチングを抑制して姿勢を安定化。旋回時には、リア内輪のグリップ限界を見極めながら後輪の駆動力配分を増やすことで、前輪の駆動力負担を減らしてグリップの余裕を増やし、タイヤの負荷バランスを向上させることで、車両挙動の安定化を図ります。
電動AWDの制御イメージ
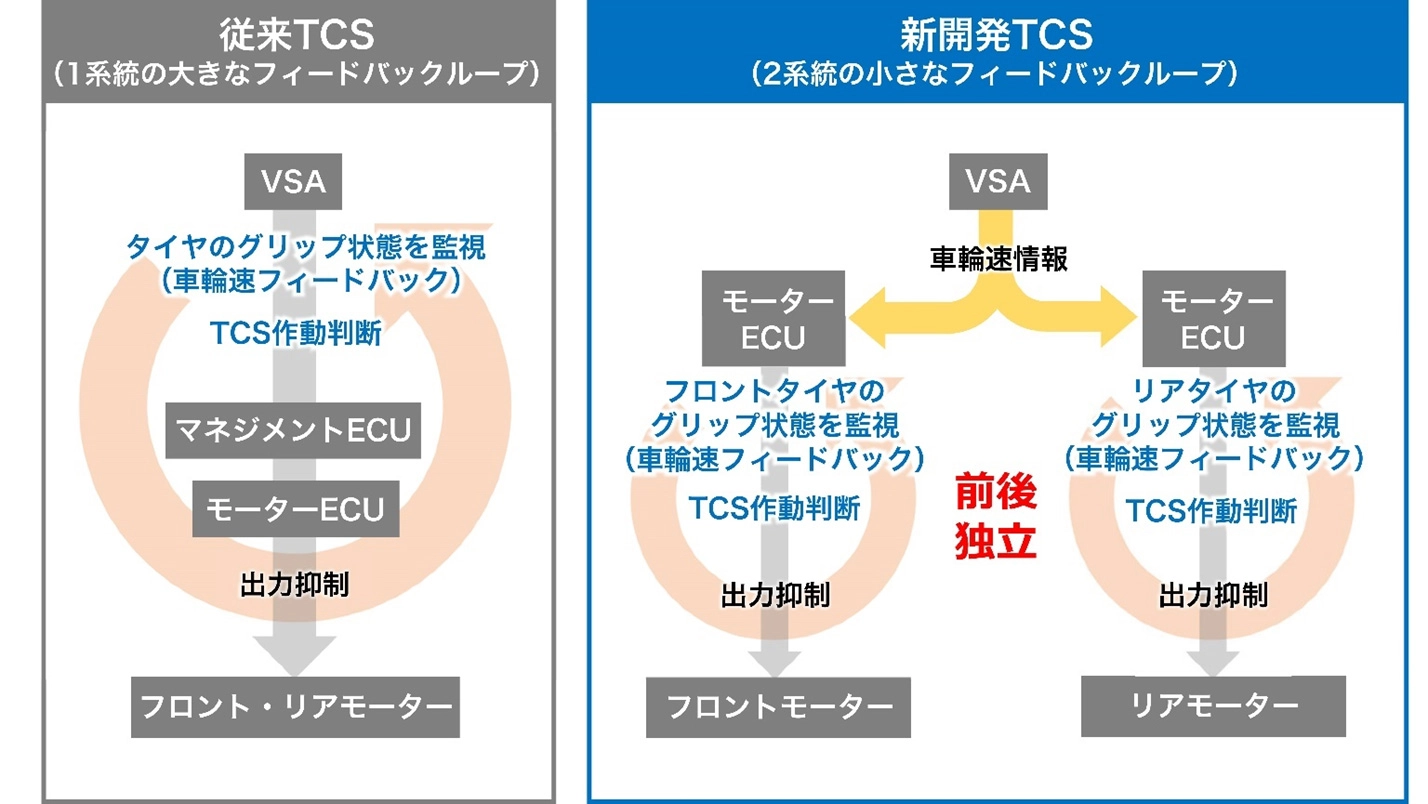
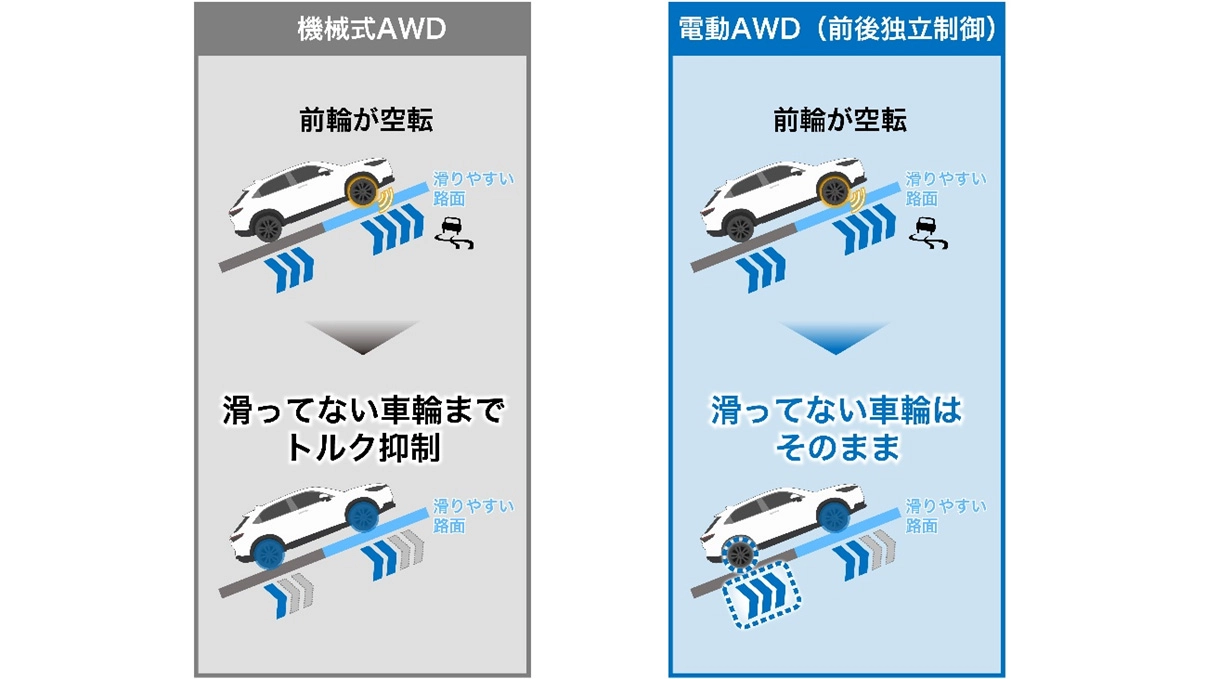
高精度で応答性の高いモータートルク制御による緻密な前後駆動力の最適配分に加え、前後のモーターを独立制御する新開発TCS(トラクションコントロールシステム)によって、タイヤのスリップ抑制を高速で高精度に制御します。従来TCSでは、スリップをVSAが検知しマネジメントECUとモーターECUを介して制御するのに対し、新開発TCSでは、前後の独立したモーターECUが前後輪のスリップをそれぞれ検知するとともにダイレクトに各モーター出力を制御。迅速なスリップ制御を行うとともに前後輪それぞれの駆動力を最大化することで、滑りやすい路面での登坂時などでも4輪のタイヤグリップを最大限に発揮できます。例えば前輪のみスリップしている状態で前輪・後輪両方の出力を抑制するケースがあった機械式AWDに対し、スリップした車輪側のみ出力を抑えて駆動力を確保することで、より安心感の高い走りをもたらします。
新開発TCSの制御イメージ
新開発TCSによる早期のスリップ検知・制御イメージ
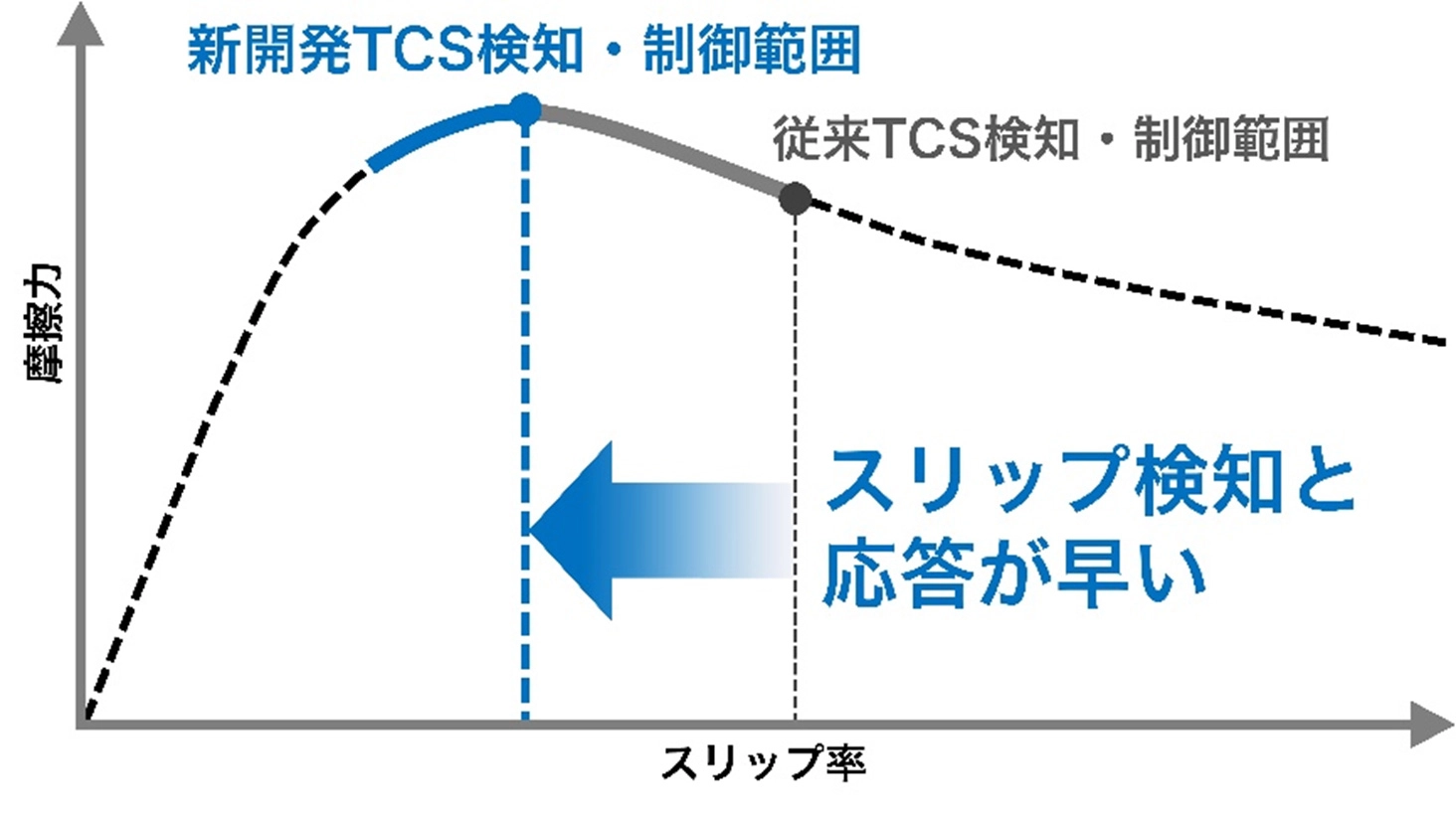
前後2系統の小さなフィードバックループでスリップを早期に検知し、前後モーターを独立かつダイレクト制御することで応答性を向上
新開発TCSによる駆動力最大化イメージ
この、電動AWDと新開発TCSを組合せることで、より安心でかつ、意のままの走りを目指します。ワインディングなどにおけるコーナリングでは、旋回進入での減速時、前輪はもちろんのこと後輪にも回生ブレーキを発生させることで、スリップを抑制しながら、高い回頭性を得やすい姿勢で減速。その姿勢を維持しながら旋回に移行し、後輪にも駆動力を与えて四輪の駆動力を最適化させることで車両挙動を安定化。立ち上がり加速では、後輪の荷重増加に合わせて後輪駆動力配分を増加させ、スリップによる挙動の乱れを抑制しながらトラクションを最大限に確保してスムーズに加速します。
これら一連の制御により、路面の状態を問わず優れたライントレース性や操縦安定性を発揮。さらに滑りやすい雪道の走行においてもタイヤグリップを最大限に引き出し、スリップによる不安定挙動を抑えたより安心感の高い走りをもたらします。
電動AWDと新開発TCSによる制御イメージ