「誰もが楽しく上手に乗りこなせるバイク」を目指して
圧倒的な自由感。バイクの魅力をひと言で表すならば、これに集約できるかもしれません。移動の自由はもちろんのこと、一体となって道を駆ける楽しさは、まるで翼を手に入れたかのような拡張感と幸福感をわたしたちにもたらしてくれます。
一方、2つの車輪で支えるバイクは、不適切な操縦をすると転倒のリスクがあることも事実。もし、転倒のリスクがなく、誰もが上手に乗りこなせるバイクがあったなら、もっと安全にもっと気軽にあの自由感を楽しんでいただける。もっと多くの人にバイクに乗る喜びを知っていただける。そんな漠然とした思いで、「Honda Riding Assist」の開発をスタート※1しました。
Honda Riding Assistとは
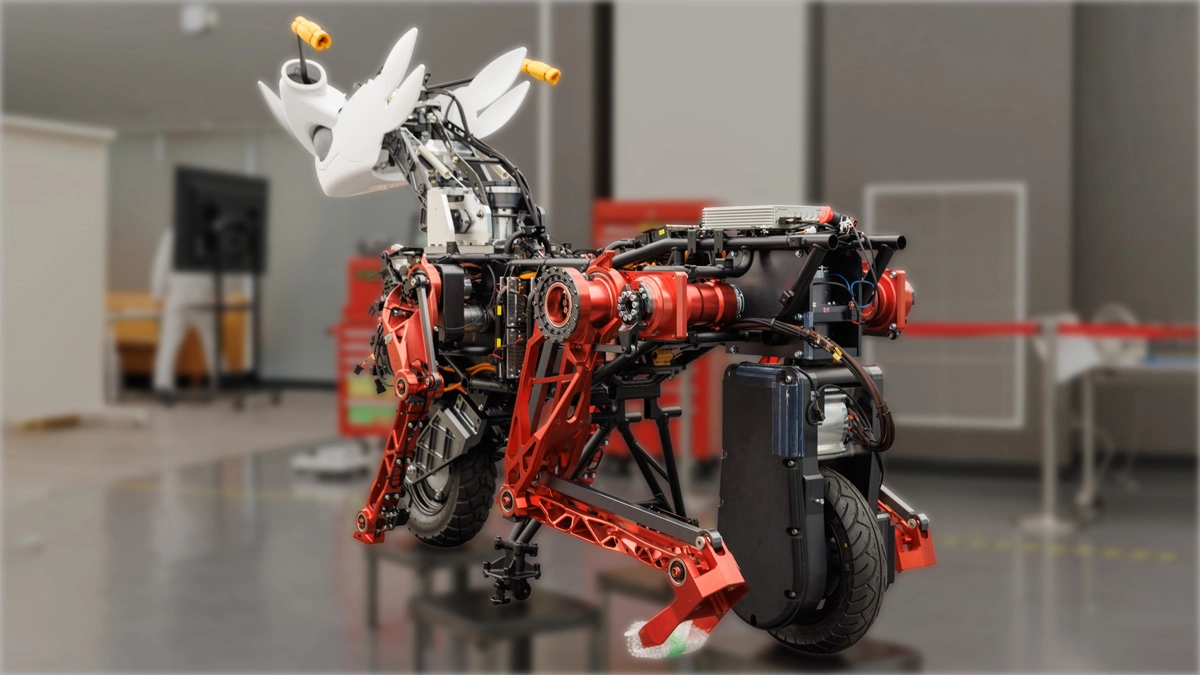
2017年、Hondaは「CES※2 2017」に、自立可能なバイクのコンセプトモデル「Honda Riding Assist」を発表し合計3つの賞※3を獲得しました。これは、ASIMOに代表されるヒューマノイドロボット研究で培ったバランス制御技術を応用したもので、低速走行時や停止時に、ライダーが乗っていても、乗っていなくても自立することが可能。大型バイクの押し歩きを容易にするほか、将来的にはサモン(呼び寄せ)機能の要素技術となることが期待できます。また、ライダーが少しバランスを崩しても、バイク自体がバランスを保ち、ふらつきや取り回しの際の転倒リスクを軽減します。

4年後の2021年には、ライダー・マシン協調制御によってライダーの操縦意図と調和したバランスアシストを可能にする第2世代の「Honda Riding Assist」を発表。翌年の「人とくるまのテクノロジー展 2022 YOKOHAMA」に出展するやいなや、多くの来場者や業界関係者を驚かせました。
ではHondaは、「Honda Riding Assist」をどのように開発し、どこへ向けて進化させようとしているのか。その歩みとHondaが描く未来を紹介します。
※1 「Honda Riding Assist」は開発中の技術であり量産適用は未定。
※2 CES(シーイーエス)は全米民生技術協会(Consumer Technology Association:CTA)が主催する世界最大級の技術見本市。
※3 多言語展開するテクノロジーブログ「Engadget」が主催するBest of CES 2017の「Best Innovation」および「Best
Automotive Technology」、および、米国の技術誌「Popular Mechanics」が主催するBest of
CESの「Editors' Choice Awards」を受賞。
ロボット開発で培ったバランス制御技術
ASIMOの意義
2000年にHondaが開発した人間型ロボット「ASIMO」は、親しみやすい外観と巧みな自律歩行で注目を集めました。しかしASIMOは、Honda Roboticsのアイコンとなるために開発されたわけではありません。「新たな価値をもたらすモビリティを創造したい」という熱意のもと、自律歩行のみならず、周囲の状況に対する的確な判断や人に合わせた行動などを合わせ持ち、「人の生活空間で役に立つために」生まれ、成長してきたのです。その開発で培った知見と技術は、歩行訓練機器「Honda歩行アシスト(2015年)」や、パーソナルモビリティ「UNI-CUB(2012年)」、「UNI-ONE(2025年)」などに応用され、新たな価値を創造する基盤となりました。
バイクとバランス制御技術との出会い
二輪の研究開発部門がASIMOのバランス制御技術に着目したのは、UNI-CUBの前身である「U3-X(2009年)」の開発を終えた頃でした。上手に走らせるためにある程度のスキルが求められるバイクに、全方位移動が可能なU3-Xの制御技術を融合すれば、「誰でも楽しく上手に乗れる新しいコンセプトのバイクが作れるのではないか」と思い立ったことがきっかけです。そしてU3-Xは、ASIMOの開発で確立したバランス制御技術、すなわち倒立振子(とうりつしんし)制御のノウハウに基づいて開発されていました。それはまさにバイクのバランス制御に適した技術だったのです。


ロボットからバイクへ
バランス制御の類似性
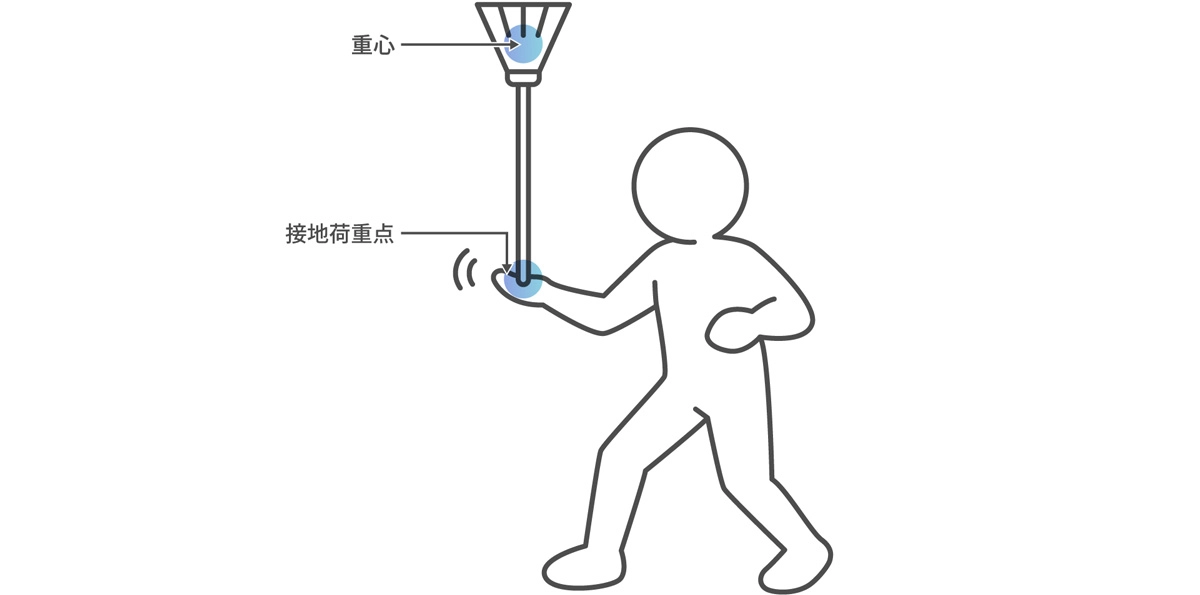
倒立振子とは、支点よりも重心が高い位置にある振り子のこと。動力学や制御工学の分野では不安定なシステムとして広く知られており、制御研究の基礎的題材として用いられています。身近な例としては、てのひらに傘を立てて乗せ、倒れないようにバランスをとる遊びも、倒立振子安定化制御のひとつです。そして、“支点よりも重心が高い位置にある”という意味においてASIMOもバイクも同じ倒立振子です。
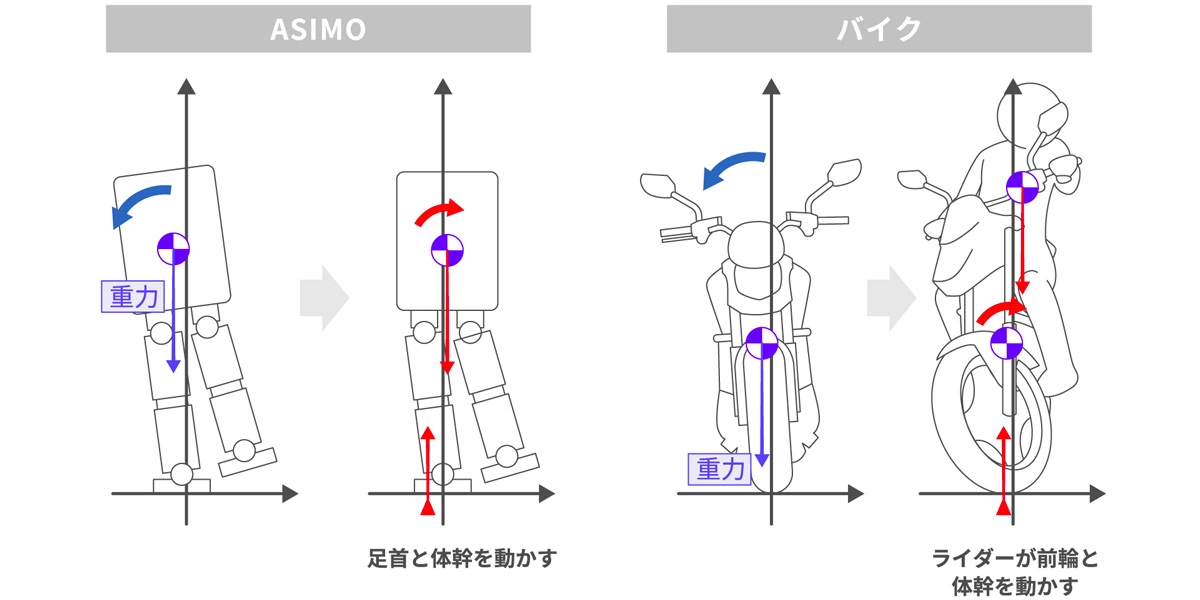
ASIMOは、静止時にバランスを崩しそうなとき、足首を動かして接地荷重点(支点)を変え、同時に体幹を動かして重心を移動させ、姿勢を維持します。停止中のバイクも同様に、ライダーが前輪を操舵させて接地荷重点を移動させ、体幹を動かして転倒を防ぎます。すなわち同じ原理でバランスを取っているのです。
バイクの特性と技術ターゲットの明確化
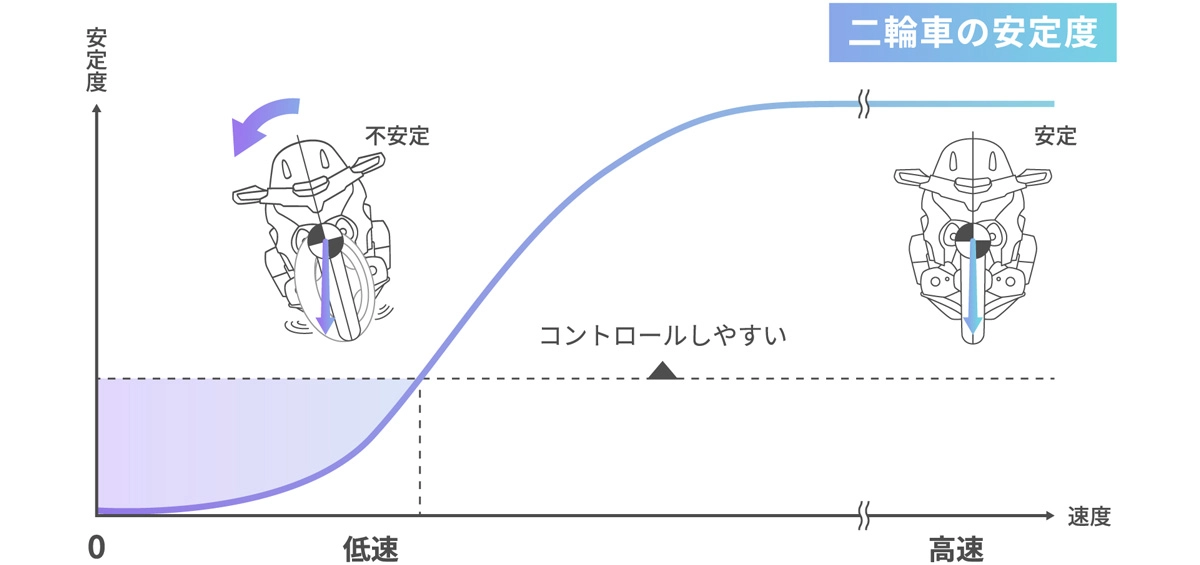
一方、バイクには高速走行時は安定度が高く、車速が低くなるにつれ安定度が低くなるという特性があります。停止時にはライダーが足で支えなければ姿勢を維持することはできません。いわゆる「立ちゴケ」への不安が、バイクライフに踏み出すうえでのハードルとなっており、あるいは、大型バイクへの乗り換えを躊躇させる原因になっているのではないかと考えました。そこでまず、低速走行時や停止時の転倒リスクを軽減することからHonda Riding Assistの開発をスタートしました。
Generation 1:自立制御技術の確立(2017年)
仮説の導出
ASIMOもライダーも接地荷重点と姿勢を変えることでバランスを保ちます。この原理をバイクの動力学モデルで分解すると、低速走行時や停止時は、前輪の操舵によって生じる接地荷重点、横加速度と遠心力の制御、そして、ライダーと車体の重心移動に相当する質点(質量があり大きさのない力学的概念)の移動によって自立が実現できるという仮説を導くことができます。前輪を操舵することはアクチュエーターを用いれば難しくありません。課題は、質点移動の理論を導き、技術として確立させることにありました。なぜなら、前輪を操舵させただけでは、質点移動によって発生するロールモーメントが、希望の方向に向けて十分であるかどうか明確ではなかったからです。
質点移動の在り方を導いた等価2質点動力学モデル
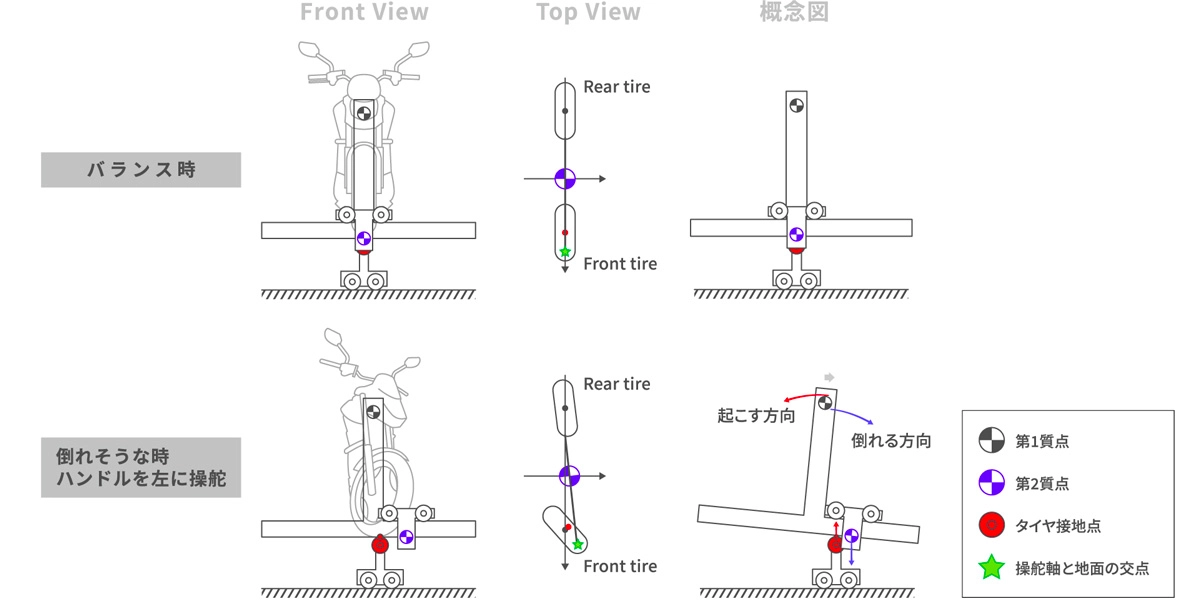
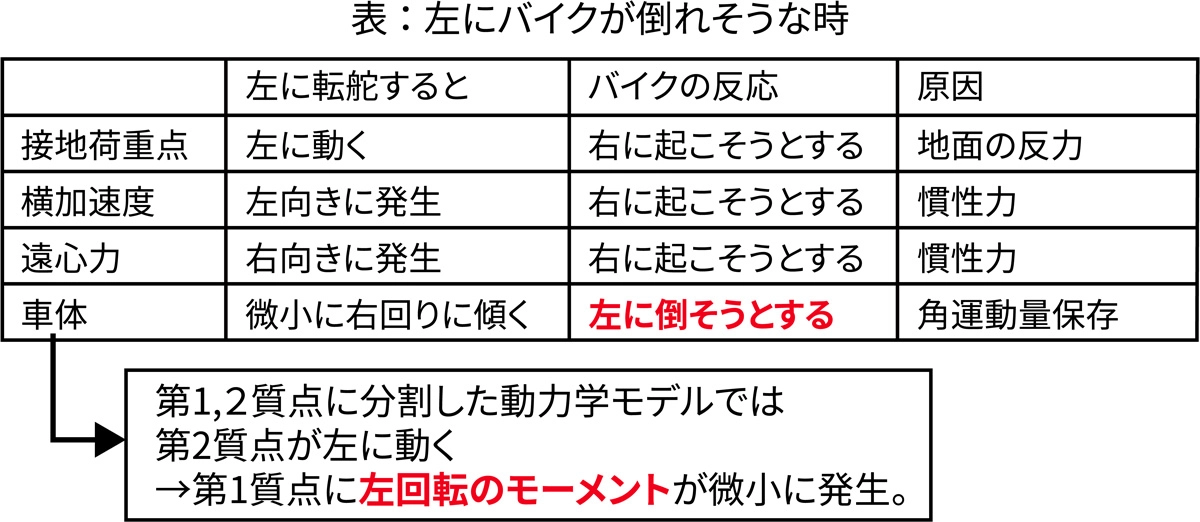
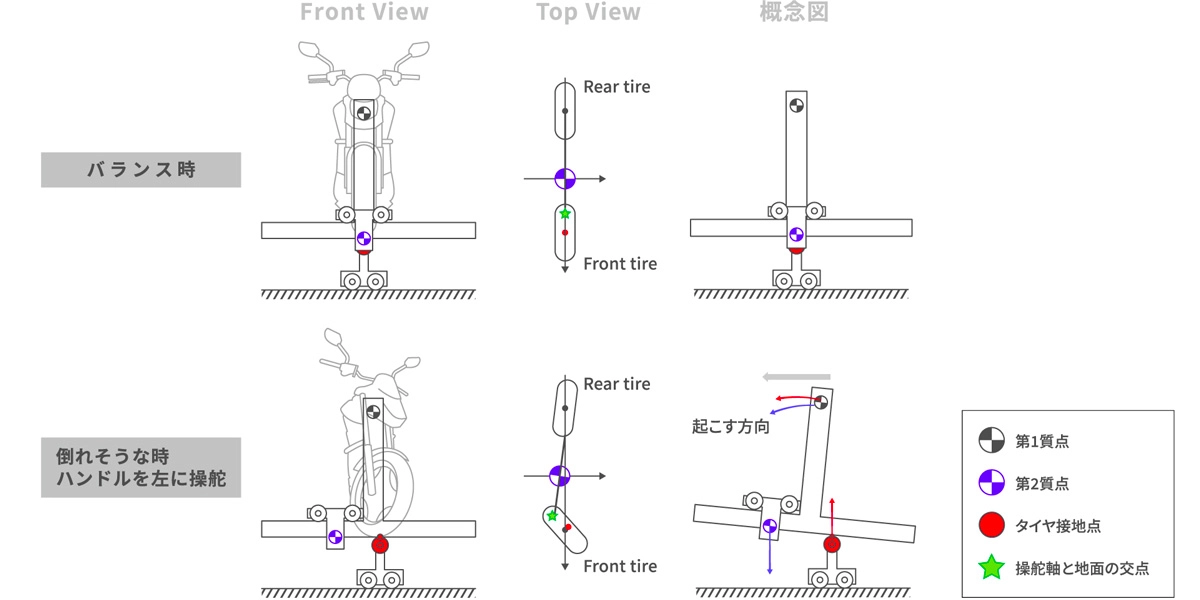
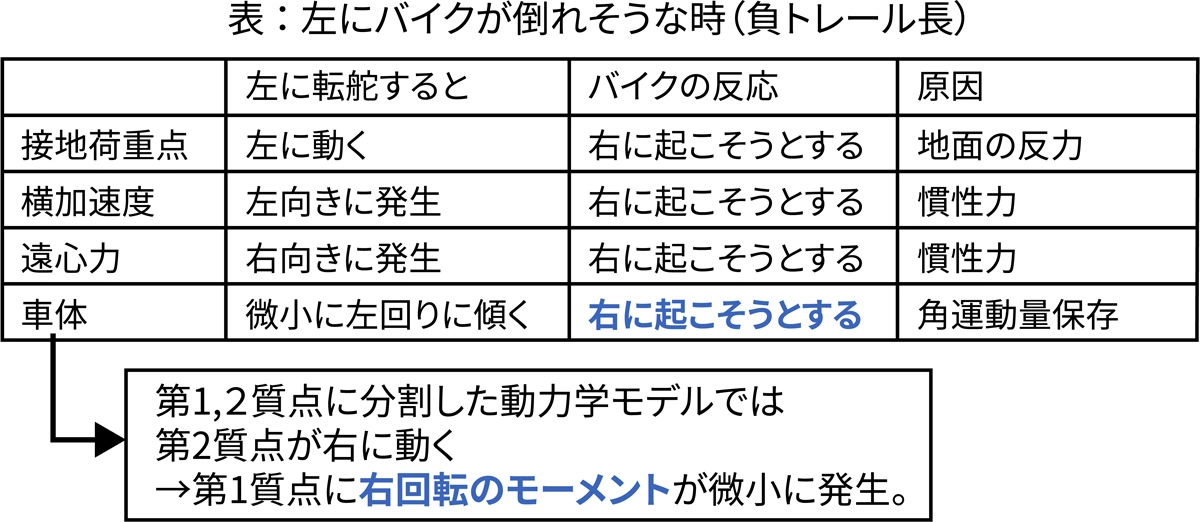
開発では、質点移動の在り方を導くために、バイクの質点を重心より上に存在する第1質点(倒立振子における重心)と、地面上に存在する第2質点(倒立振子における支点)に分割した動力学モデルを考案し、検証に用いました。例えば、左側に倒れそうな際、バランスを保つために左に操舵すると、接地荷重点は左に動き、横加速度も左向きに発生します。これらは車体を右回りに起こそうとする復元力をもたらします。加えて一般的なバイクの構造では、車体が微小に右回りに傾きます。右回りの車体傾きですから車体を起こす復元力になると考えがちですが、実は反対です。角運動量保存の法則により、バイクをより倒れさせようとする力が働いてしまうのです。これは第2質点が左側に動くことと等価で、第1質点には左回転のモーメントが微少ながら発生します。これを反転させること。つまり、第1質点に右回転のモーメントを発生させ復元力を得ることが課題でした。
角運動量保存の法則
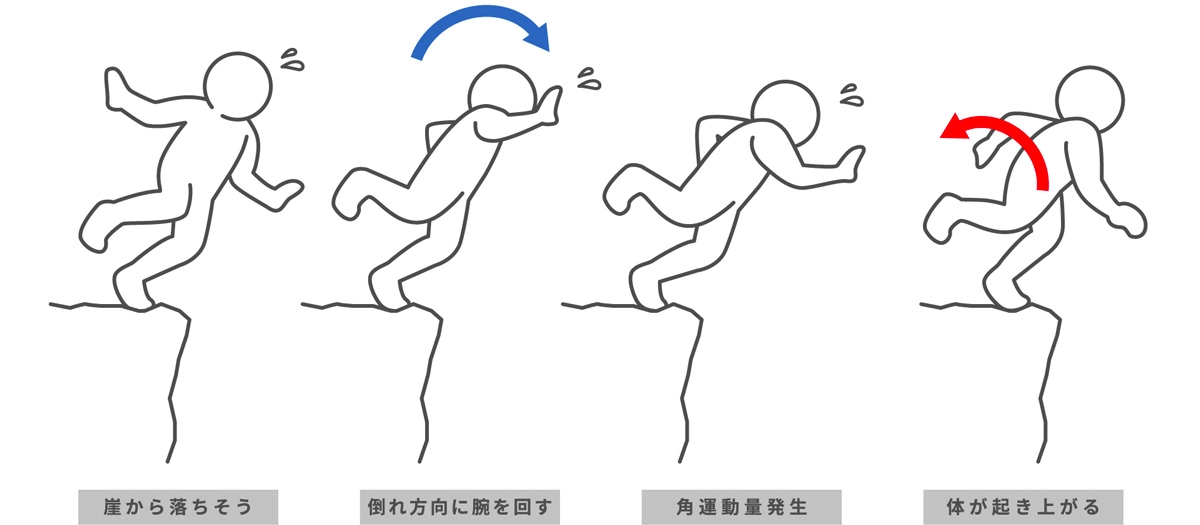
角運動量保存の法則は、外部から力を受けない限り角運動量(回転の勢いを表わす物理量)は一定に保たれるとする物理法則。前方に倒れそうな人が倒れ方向に腕を回すと腕に角運動量が生じる。角運動量保存の法則により胴体には腕とは逆向きの角運動量が生じ起き上がることができる。
自立制御を実現したトレール長可変技術
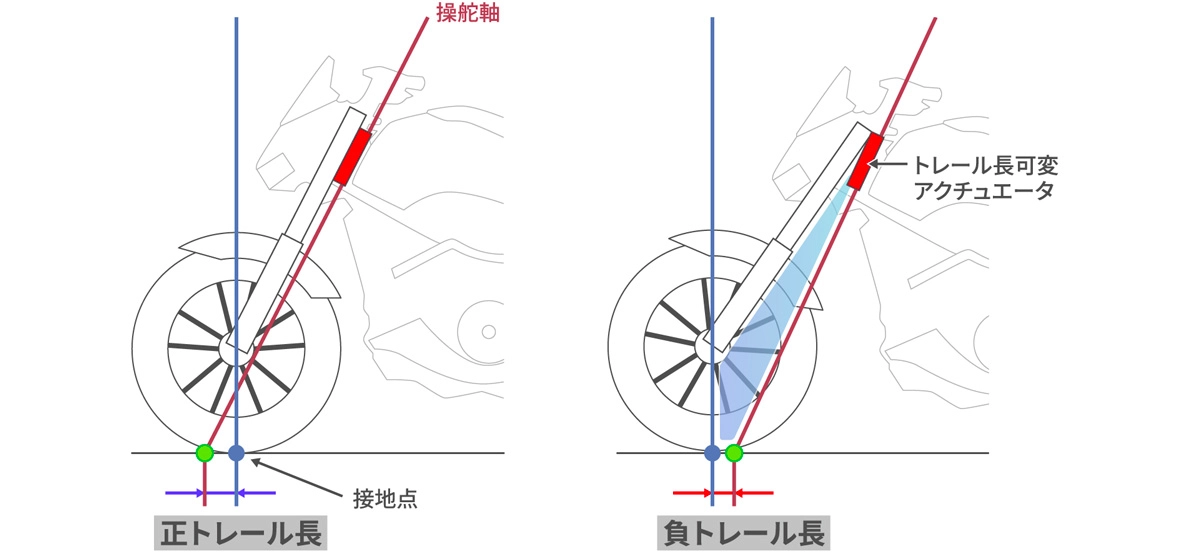
自立制御の課題は、接地荷重点、横加速度、遠心力、質点という4要素のうち、第2質点の移動の極性のみが反対であることです。そこで着目したのが、前輪のトレール長と質点移動の関係でした。トレール長は、タイヤの接地点と転舵中心軸(フロントフォークとは異なる)が路面と交わる点の距離を表し、バイクの直進安定性などに大きく影響します。一般的なバイクの場合、タイヤ接地点より前方に転舵中心軸があることからトレール長もタイヤ接地点より前方の値(ポジティブトレール長と呼称)となりますが、転舵中心軸をタイヤ接地点より後方に設定(ネガティブトレール長と呼称)することで、質点移動の極性を反転できることがわかりました。これにより自立制御3要素のすべてを、バランス復元力に生かすことが可能となります。そこで、前輪操舵をアシストするアクチュエーターと、フロントフォーク角度を変化させトレール長を可変するアクチュエーターを備えることとしました。
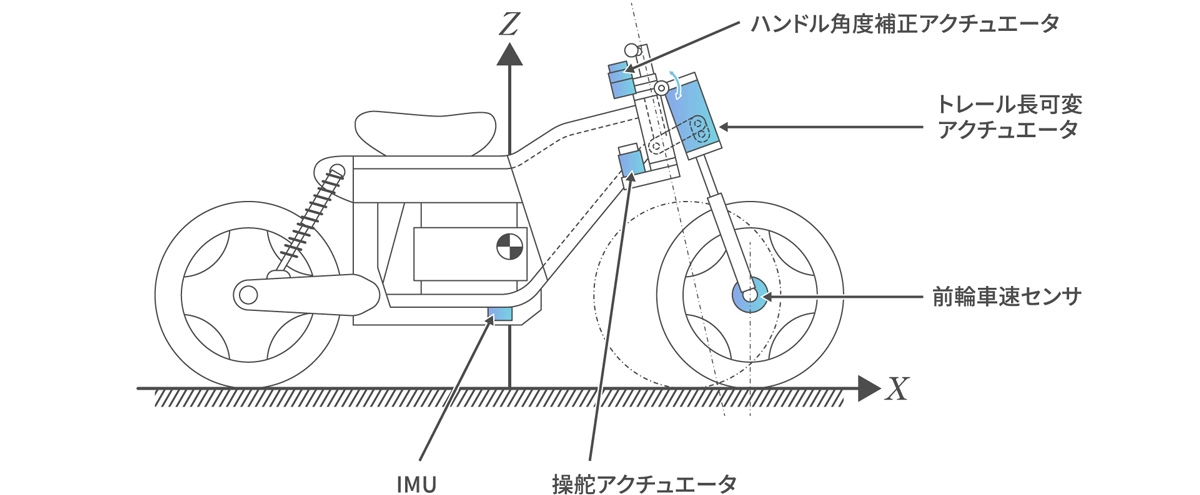
Generation 1:システム構成
加速度センサーとジャイロセンサーを複合したイナーシャル・メジャーメント・ユニット(IMU)や舵角センサーの情報を元に、ECUが各アクチュエーターを適切に制御。常用速度域ではポジティブトレール長とし、一般的なバイクと同様に遠心力と横加速度による自立走行を提供しながら、遠心力が小さくなる低速走行時や停止時にはネガティブトレール長に変更するとともにきめ細やかな操舵制御を行うことで、ライダーが乗っていてもいなくても自立を可能としました。
Generation 2:操る喜びとの両立(2021年)
Generation 1の課題
「自立するバイク」は完成させたものの、Generation 1には大きな課題が残されていました。制御のすべてを前輪操舵にまかせたことで、ライダーに違和感を覚えさせてしまうという事象が確認されたのです。また、ライダーの意図に反した制御をしてしまう事態も発生しました。具体的には、ライダーが旋回するために車体を傾けたにも関わらず、バイクを起こそうとしてしまうというふるまいです。これでは「誰もが上手に乗りこなせるバイク」にはなりません。
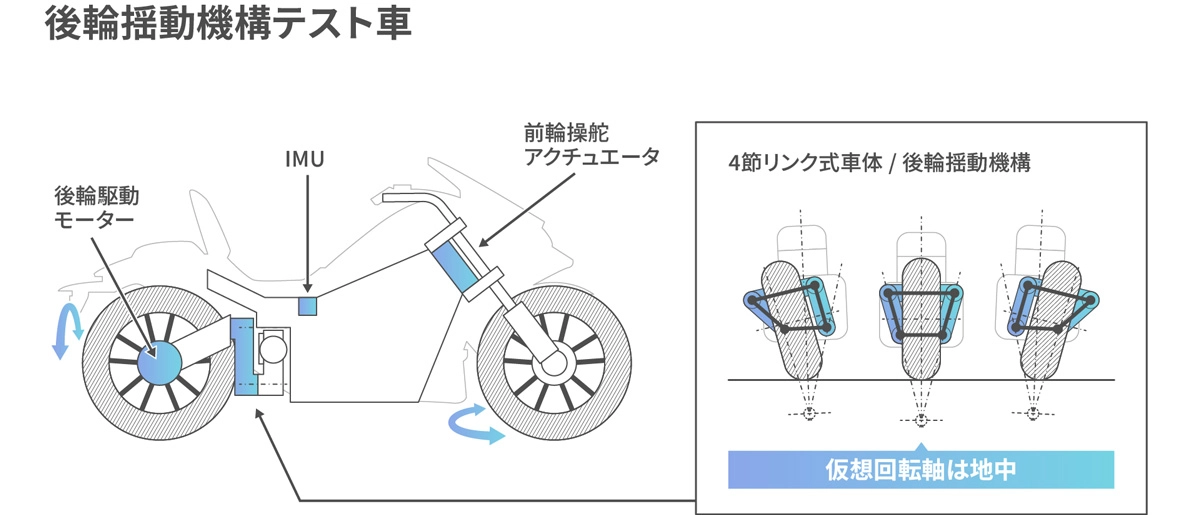
質点移動制御の新たな手法、4節リンク式揺動機構
操舵と質点移動による制御の基礎理論はすでに手の内にあります。そこでまず、ライダーの違和感を解消するために、操舵は主にライダーにまかせることとし、トレール長可変とは異なる手法で質点を移動する技術を追求しました。車体の中心軸を回転させる手法、転舵中心軸と並行するもう一つの制御軸を回転させる手法、転舵中心軸と交差させた鉛直の制御軸を回転させる手法など、いくつものアイデアをテストするなかで、ある事実に気づきます。ライダーはハンドルと自分との間に操舵とは別の動きがあると違和感を覚え、一方、シート下の動きに関しては極めて寛容であるという特性です。そこで、車体と後輪の間に、下辺よりも上辺が長い台形の4節リンクを配置し、アクチュエーターによって車体と後輪を揺動させる機構を新たに開発。後輪接地荷重点の移動により、Generation 1でマイナストレール長に変更した場合と同等の質点移動効果が得られることを実証しました。こうして、前輪トレール長可変技術に代わる新たな質点移動制御を確立し、ライダーの違和感を解消したのです。
ライダーとの協調
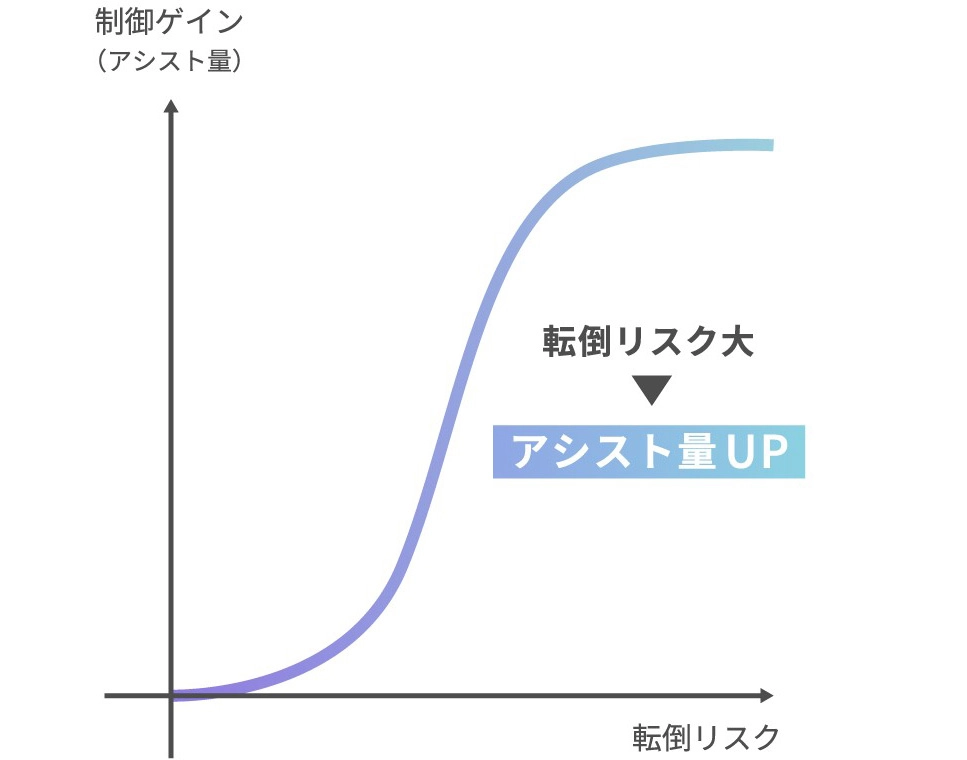
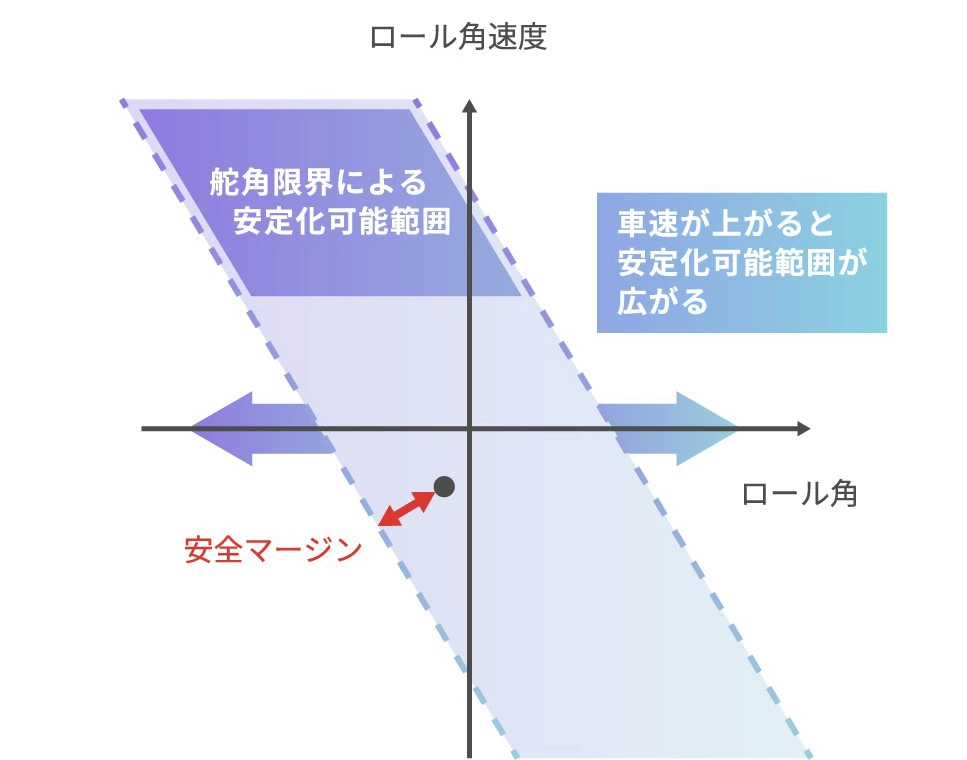
一方、ライダーが旋回するために車体を傾けたにも関わらずバイクを起こそうとしてしまう、という不具合に対しては、転倒リスク指標を用いることで解決しました。これは、ASIMOの開発から生まれたHonda独自の指標で、ロール状態(ロール角・ロールレート)から、理論上の転倒リスク評価を可能にしたものです。これに基づいて安定化可能な範囲を導き出し、転倒リスクが高い場合にのみ制御することで、ライダーの自由な操縦を尊重しながら転倒リスクを軽減する、理想的な協調制御を実現したのです。
転倒リスク指標グラフ
ロール状態から転倒リスク評価をするイメージ
Generation 2:システム構成
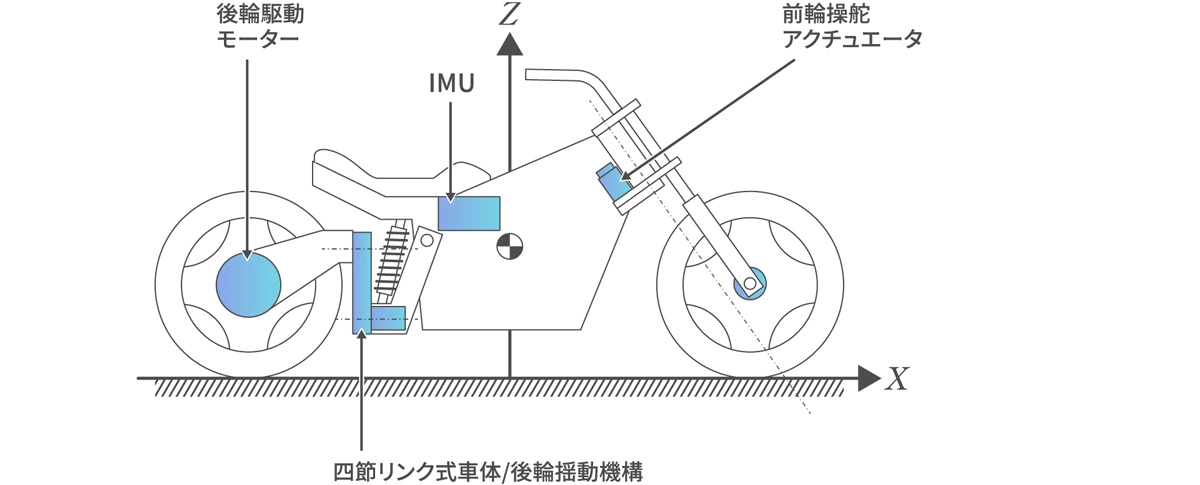
IMU、舵角センサー、ECUをGeneration 1から引き継いだうえで、前輪はトレール長可変機構を廃止し、操舵制御のみとしました。トレール長可変機構に代わる4節リンク式揺動機構は、常用速度域では制御を行わず、低速走行時や停止時に転倒リスクが高い場合のみ車体と後輪を揺動させて復元力を発生させます。
進化の方向性
Honda Riding Assistの目標は、「誰もが楽しく上手に乗りこなせるバイク」を創造することにあります。Generation 2において、低速走行時や停止時の転倒リスク軽減は実現したものの、それは目標達成に向けた技術の端緒をつかんだに過ぎません。Hondaは、高速を含む全車速域への対応はもちろんのこと、先進運転支援システムであるHonda SENSINGや自動運転技術の応用を視野に入れ、バイクがもたらす圧倒的な自由感を、もっと安全にもっと気軽に楽しんでいただけるシステムへと、Honda Riding Assistを進化させていきます。
同時に、Honda Riding Assistのふるまいがライダーの意図と完全に合致するよう、協調制御を進化させます。その際重要となるのが、ライダーの気持ちに深く寄り添うことでしょう。現段階でも走行状態やライダーの操作を把握することは可能です。体重移動の意図をある程度推測することもできます。しかし例えば、バイクが少し傾いたときに、その挙動がライダーの旋回意図によるものか、路面の隆起など外乱によるものかを正確に把握するまでノウハウは熟成できていません。ライダーとの協調をより高次元に引き上げるには、ライダーがいったいどういう気持ちで、意識的に、あるいは、無意識にバイクを操っているのかという領域まで踏み込むことになるでしょう。
もとよりHondaは、人を知ることで、人に役立つ技術や商品を世に送り出してきました。Honda Riding Assistもまた、ライダーを深く知ることで、「誰もが楽しく上手に乗りこなせるバイク」の実用化を目指します。