自己紹介
ASIMOってどんなロボット?
ASIMOはHondaの新たな挑戦から生まれた人間型ロボットです。
Hondaは、夢の力を信じ、その夢をひとりでも多くの人と分かちあいたいと、いつも挑戦をし続けている会社です。Hondaが挑戦してきた夢のひとつに、ASIMOがいます。
ASIMOの名前は、Hondaの夢の言葉。
「Advanced Step in Innovative Mobility( 新しい時代へのステップアップ。)」という意味の言葉の、それぞれ頭の文字をとって、ASIMOと名付けられました。
Hondaのロボットの研究は、みんなが生まれるずっと前から始められました。
まず、歩くことだけのロボットの研究から始まり、約6年の月日が経ち、P2、P3という、2足で歩く人型ロボットを開発することができました。そしてHondaはそれらのロボットを世の中に発表し世界中の人々をおどろかせたのです。
その後もHondaは実用化に向けた、新しい技術の研究・開発にチャレンジし、その成果として、ついに2000年に初代のASIMOが誕生しました。
初代のASIMOが誕生した後も、Hondaのさらなる挑戦は続きます。
人間社会になじむロボットにするための開発です。
歩行の動きをよりスムーズにしたり、人に合わせて動けるようにしたり。また場所に合わせて行動する研究も進められました。そうした研究を日々つづけ、現在の姿になっています。
将来みんなの生活する場所で、みんなの役に立ってたくさん活躍(かつやく)できる人間型ロボットを目指し、Hondaは今日も挑戦し続けています。
身体測定
みんなとASIMOの体の違い、どんな風になっているのか、調べてみよう
ASIMOの体にマウスを合わせて機能を知ろう!
特技
ASIMOは色々なことができます。ASIMOの特技を見てみよう!







あゆみ
現在のASIMOになるまでの歩み







ASIMO2000へ







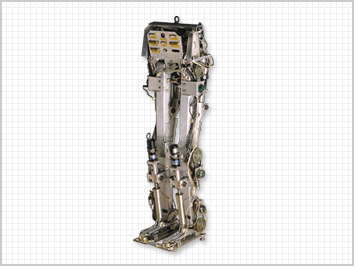
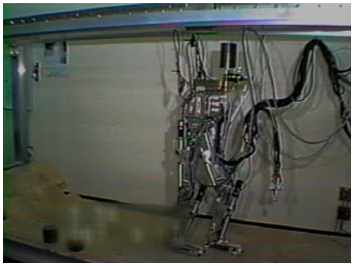
E0(1986)
2本足で歩くには?まず2足で歩かせてみる。
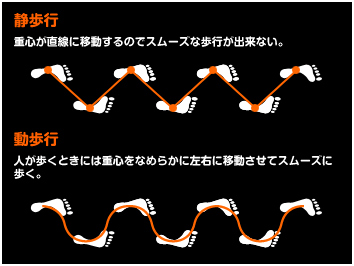
2本足で歩くしくみの研究でつくった最初のロボット「E0」。まず「歩くこと」を研究し2本足で歩くのには、いつも体の重心が足の裏(うら)の範囲(はんい)に入るように歩く「静歩行」と、体の動く勢いを利用してスムーズに歩くために重心を分散(ぶんさん)させた「動歩行」があることが分かりました。E0はまずこの「静歩行」による移動で足をこうごに出して歩くことに成功しました。このころ「静歩行」で歩いていたため、なんと1歩に5秒もかかっていました。
E0の動き
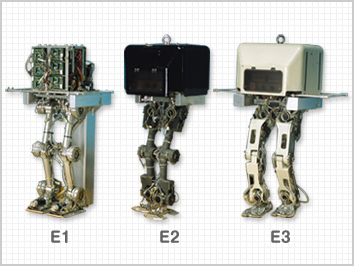
E1・E2・E3(1987-1991)
人間がどのように歩いているかをさらに追求し、「動歩行」をついに実現する。
E0の「静歩行」から、より人間の歩き方に近い「動歩行」を実現するために、徹底的(てっていてき)に人間がどうして歩けるのかを研究しました。研究は、人間の他に動物の歩き方もふくめ、多くの生き物の「歩行」を観察しました。その結果、足首やひざなどの関節部分を利用することで、よりスムーズな歩きが出来ることが分かり、さらに関節の位置やその動きを調べました。そしてその動きをデータにし、ロボットに覚えさせて何度も実験をくりかえし、ついに「動歩行」を実現させることができました。
E1の動き
E2の動き

E3の動き

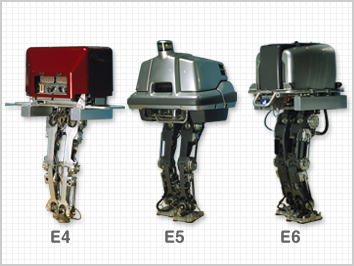
E4・E5・E6(1991-1993)
2足歩行の基本機能がついに完成。
「静歩行」そして「動歩行」を研究した後の次の課題は、歩く姿勢がより安定しているかでした。安定した姿勢で歩行することで、押されたり、床のでこぼこがあってもたおれなかったりすることができ、階段や斜面でも姿勢を自分で保ち、歩けるように研究しました。こうしてついに人間と同じ2足歩行の基本の機能がついに完成しました。
E4の動き
E6の動き
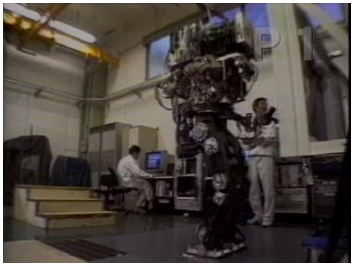
P1(1993)
腕(うで)と体がついていよいよ人間型ロボットに。
人間型ロボットとしてのモデル第1号機の「P1」。腕(うで)と体がつくことで身長は191.6cm、体重は176kgになりました 腕(うで) がつくことによってよりスムーズな歩きが出来るようになり、手を使ってスイッチのオン・オフや、ドアの取っ手をつかんだり、物をつかんで運ぶなどの動きができるようになりました。
P1の動き
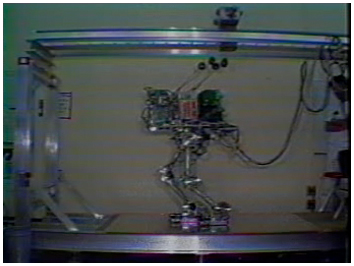
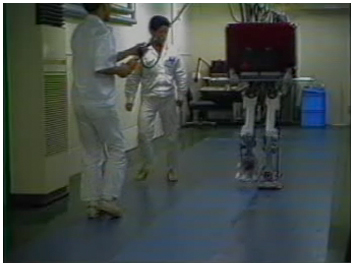
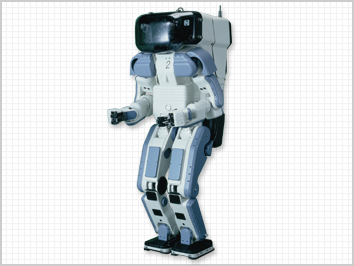
P2(1996)
はじめて世の中に発表された人間型自律(じりつ)2足歩行ロボット。
Hondaがこれまで、長い間2足歩行の人間型ロボットを研究し、ついに世の中に人間型ロボットとして発表された「P2」。身長は182cm、体重は210kgに。今まで外に配置されていたコンピューターやモータードライブ、バッテリー、無線機などロボットが動くために必要なものが全て体の中におさまりました。これによりリモコンのように、電波で指示のやりとりや自動動作で動けるようになり、より自由な歩きや階段の上り下り、台車を押すなどの動きができるようになりました。
P2の動き
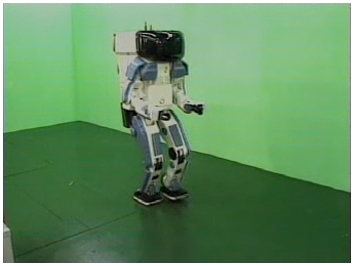
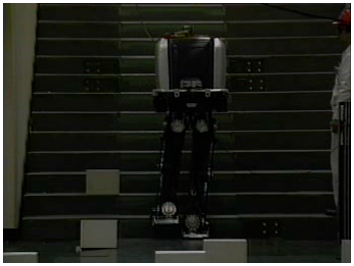
P3(1997)
人間社会になじむサイズを目指して。
様々なコンピューターが体の中に入ることで身長や体重が大きくなった体を、人間の住む環境に合うように、少しずつ小さくて軽い体にする必要がありました。そこで次はこの小型・軽量をポイントに研究を開始しました。使用する部品や材料を見直したり、コンピューターを分散させて小型にし配置したりと工夫が加えられ、身長160cm、体重130kgまで小さくすることができました。人間の生活環境で活躍(かつやく)できるサイズを目指しここからさらに小型・軽量化の研究は進みます。
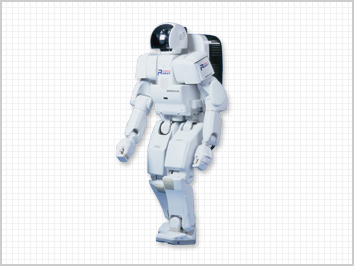
ASIMO(2000)
ASIMOとしてのロボット開発がスタート。
様々歩行の研究や小型・軽量化を進め、14年の長い年月をかけて、家や仕事場などの人間の生活空間で活躍(かつやく)できるようにASIMOが誕生しました。
一般的な家庭の生活空間で活躍(かつやく)することを考えて、さらに小型・軽量化が進みました。また転んだりぶつかったりしないように、より自由な歩行を目指し研究・開発されました。この自由な歩行には、新しく「i-WALK(アイウォーク)」という技術が導入され、身近にある階段や上り坂・下り坂も、よりスムーズに動くことが出来るほか、人の指示に合わせた動きや簡単なご案内ができるようになりました。
ASIMO(2001)
レンタルが可能なASIMOを発表。
人間社会で実用できるように、階段、坂道のある環境でも、さらに自由な歩行が可能となるだけでなく、使用する人の指示に合わせて動いたり、お客様に対してご案内する、さらなる機能が追加されました。こうした機能が追加され、誰もが実際に使うことが可能となり、ついにレンタル用のASIMOが発表されました。
ASIMO(2002)
頭をつかって人の姿勢やしぐさを理解し行動する新型ASIMOを発表。
近よってくる人を判断しあいさつしたり、人についていったり、指示された場所に動いたりと、人に合わせた行動ができるようになりました。また、顔を認識(にんしき)することが可能となったため、顔を覚えた人に名前をよばれると返事をする機能が実現しました。人の姿勢や仕草の意味を理解し、行動する知能を身につけた新型ASIMOは、さらにインターネットの情報を読み取り、その情報を案内することも可能になりました。
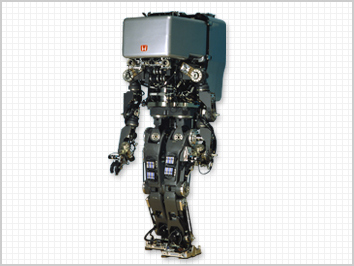
ASIMO(2004)
人と一緒に、協力して生活できるロボットを目指して。
人と一緒に協力して生活できるロボットを目指して、すばやく状況を判断して行動できるように、次世代ASIMOを発表しました。次世代ASIMOは、走る機能があらたに加わり、そのほかスピーディーな動き・全身を使った動き・自分で動く能力・人に合わせた動き・周りの状況を見て障害物をさける能力など、たくさんの動きと機能を身につけました。
ASIMO(2005)
より進化した知的な能力と、すぐれた身体機能に。
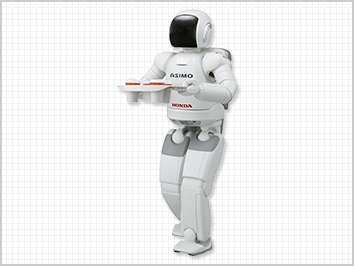
人と手をつないで一緒に歩いたり、人に合わせて行動したりサービスしたりする機能がさらに強化されました。また、これらの機能を組み合わせて行う技術も開発され、人にあいさつをした後で、ご案内、誘導(ゆうどう)したり、トレイを人から受けそのまま運ぶなど、自動で連続したサービスを行うことができるようになりました。また、長い間研究を続けてきた歩行については、ついに走るスピードが時速6kmとなり、またカーブの道も走ることができるようになりました。
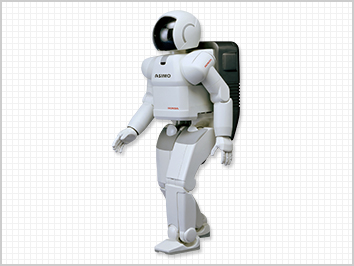
ASIMO(2007)
複数のASIMOと一緒に、協力して作業を行う。
複数のASIMOをネットワークで結び、他のASIMOの現在の位置から、実際に作業を行う位置の距離(きょり)を計算することで、ASIMO同士が他のASIMOの動きを知り、協力しながら、より早く、より効率良く仕事が進むように、仕事を分担(ぶんたん)することができるようになりました。さらに、自分自身のバッテリーの残量を知ることも可能になり、充電が必要になれば、自分で充電場所まで行き、充電を開始することもできるようになりました。また充電中にも、他のASIMOの情報を知ることができます。
ASIMO(2011)
周りの人の動きに合わせて、自分で判断(はんだん)して動く。
人が操作(そうさ)をしなくても、自分で判断して動けるように、3つの機能を開発しました。①とっさに足を出して姿勢(しせい)を保つ②周りの人の動きなどを、たくさんのセンサーから情報を集めて推定(すいてい)する③集めた情報から予測して、人が操作(そうさ)しなくても次の行動を判断する。これらの機能が備わったことで、人と一緒に生活する能力が高くなりました。