
Precision All-Wheel Steer (P-AWS), a rear toe control system, pursues at-will handling over a wide range of conditions that is not limited to the extremes, but also including the normal range. By replacing the multi-link rear suspension toe control arm on front-wheel-drive vehicles with an electronic telescopic actuator, the left and right rear wheels can be steered independently.
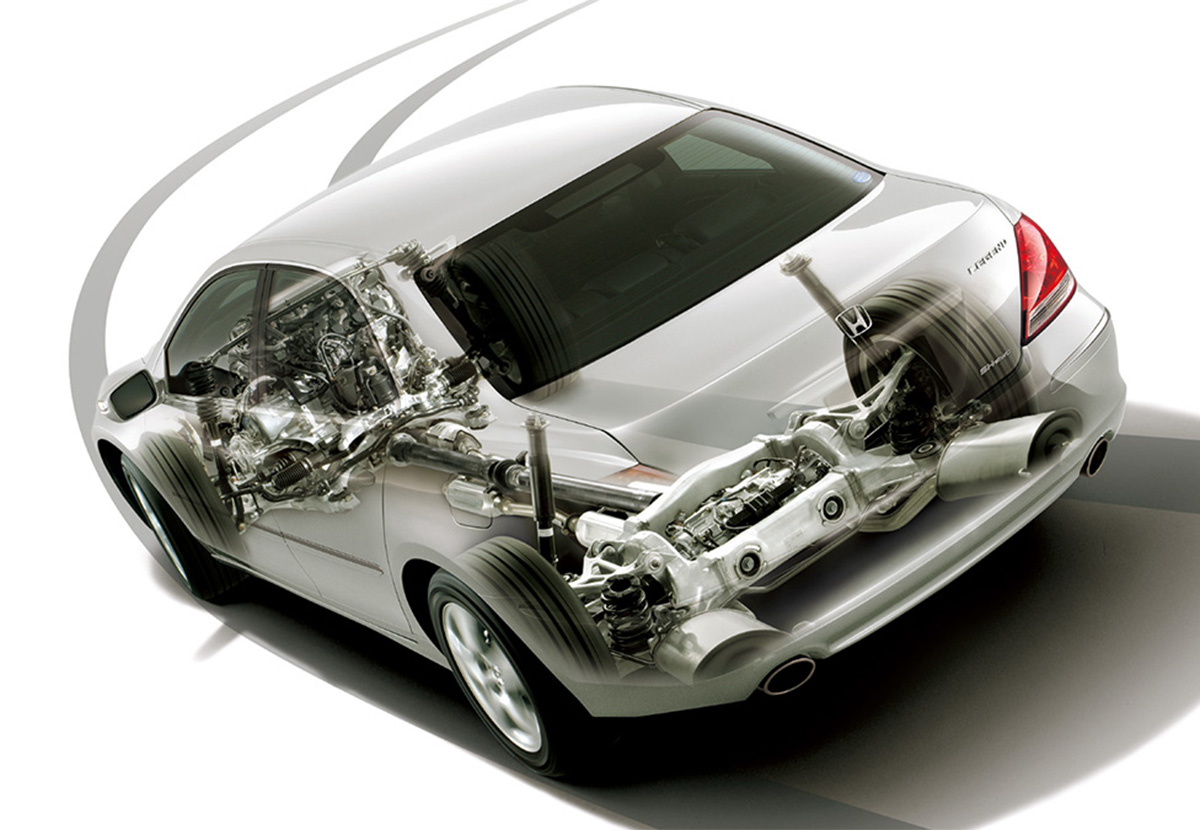
The rear suspension of an ACURA TLX

The toe refers to the direction of the tires when viewed from above the vehicle. When the tires are pointed straight ahead, the toe angle is zero. The condition where the front edges of the tires are closer together than the rear edges is referred to as toe-in, and the opposition condition, where the front edges of the tires are farther apart than the rear edges, is referred to as toe-out. By independently controlling the left and right toe of the rear wheels, P-AWS makes it possible to freely control toe-in and toe-out. In addition, the wheels can be set in phase, with the left and right rear wheels the same as the front wheels, or reverse phase, with the rear wheels opposite the front wheels, making it possible to set an appropriate toe angle according to the driving conditions.
P-AWS was first adopted on the ACURA RLX, which was announced at the Los Angeles Auto Show in November 2012 (sales started in the spring of 2013). The Honda Legend, which was essential the same model as the RLX, was announced in Japan on November 10, 2014 (sales started in February 20, 2015), but it was equipped only with the Sport Hybrid SH-AWD, a three-motor hybrid system that freely controls the drive torque of the four wheels, and did not have P-AWS.
Honda began installing the Vehicle Stability Assist (VSA) system on front-wheel drive vehicles in 1998. VSA is a system that integrates an Anti-lock Brake System (ABS), Traction Control System (TCS), and side slip control function. This system controls the brakes on each wheel, suppressing sudden changes in vehicle behavior caused by steering to avoid danger and vehicle instability caused by understeering or oversteering.
ABS, first adopted by Honda in 1982 (then referred to as 4-wheel Antilock Brake system (4w A.L.B.) increased or decreased the braking force to maintain vehicle stability during maximum braking. TCS, first adopted by Honda in 1989, is a mechanism that controls spinning by the drive wheels when starting from a standstill or accelerating on a slippery road surface, ensuring efficient acceleration and stability during maximum acceleration.
VSA, which adds side slip control to ABS and TCS, is a mechanism that improves vehicle stability by expanding the range of control during maximum steering. ABS and TCS demonstrate their effects when the driver presses on the brake or gas pedal, while VSA is effective regardless of the driving operation.
In other words, VSA is a system that controls vehicle behavior in all areas of maximum performance to provide stability and a greater sense of security while driving. By adopting a system that enhances stability and maneuverability, not only in the extreme ranges covered by VSA, but also in day-to-day driving before the vehicle becomes unstable, Honda seeks to provide the enjoyment of at will mobility and a sense of security in a wide range of scenarios. This led to the development of P-AWS.
Honda first put a four-wheel steering (4WS) system into practical application in 1987. Honda’s 4WS, the world’s first steering angle response system, can vary the characteristics of a vehicle’s turning area. To achieve this, a rear steering gear box similar to the one that steers the front wheels is also necessary, as is a center shaft connecting the front and rear, making the system large and necessitating considerable space. In addition, tie rods to steer the rear wheels are also essential, which makes it necessary to design a special-purpose rear suspension.
When developing P-AWS, a strict cost target was set and development of a system that is easy to install was prioritized. In addition, it had been pointed out that with conventional 4WS, there were instances where there was an unusual sensation that differed from the normal feeling due to vehicle behavior, and consequently, a feeling that did not entail any unusual sensation was pursued.
The P-AWS actuator
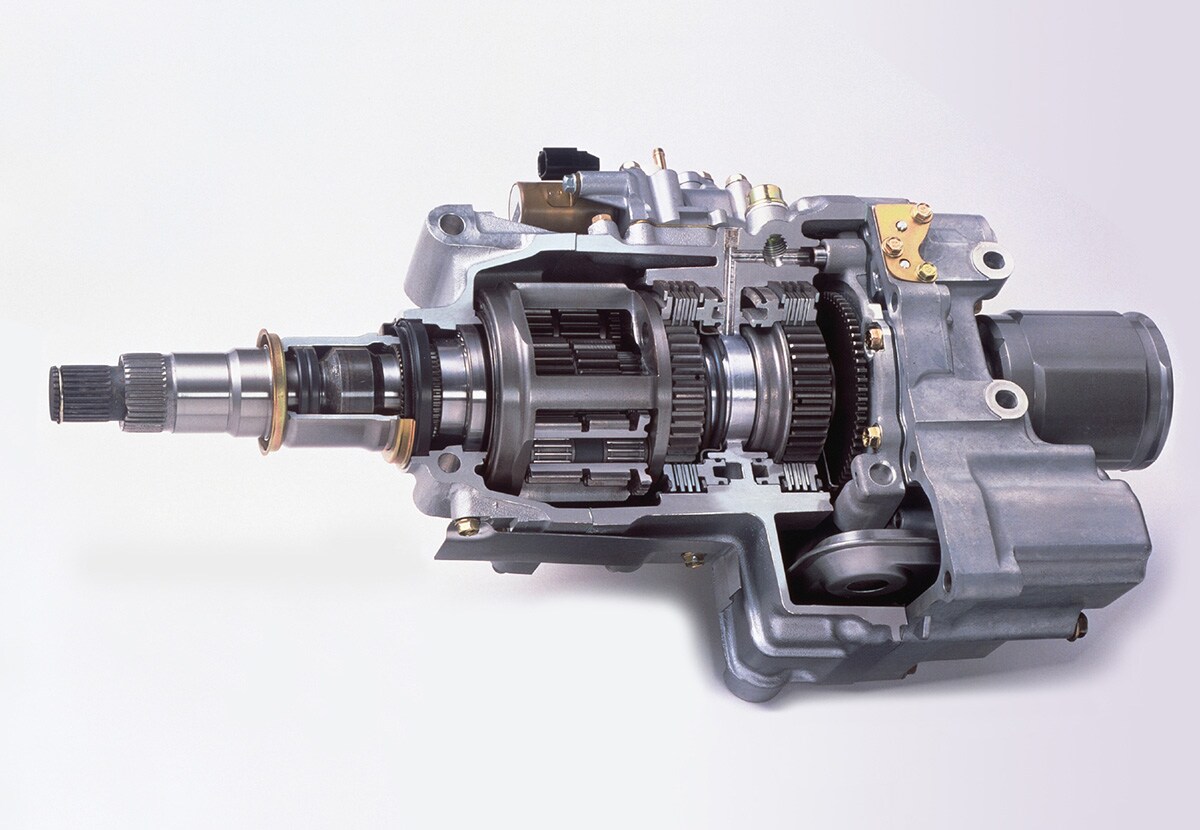
The coaxial telescopic actuator installed to replace the toe control arm of a multi-link rear suspension has a simple structure that extends and retracts a rod by rotating a trapezoidal screw using a DC motor. Trapezoidal screws have high reverse efficiency (they are difficult to move due to external forces), and as a result, they are able to maintain the toe angle without energizing the motor when the system is not being operated, enabling the system to save energy. In addition, the reduction gear uses a compact planetary gear to achieve high speed reduction. A non-contact position sensor senses the toe angle.
For the left and right actuators, a P-AWS dedicated ECU calculates the target toe angle for the left and right wheels and sends commands to the actuators based on information input to the ECU via the CAN including operations by the driver, such as the steering angle, gas pedal application, and break application, as well as vehicle information, such as wheel speed, yaw rate, and lateral G force. In consideration of safety, the maximum turning angle of the rear wheels was set to 2 degrees on the reverse phase side.
Control is based on operations by the driver and vehicle information, and feed-forward information is used to generate restoring yaw moment that offsets unstable turning moment in response to lateral acceleration. Feedback control is applied according to the difference from the target movement, which serves to stabilize vehicle behavior without any unnatural feeling.
P-AWS replaces the toe control arm and is characterized by the effects of 4WS, which varies the characteristics of the turning area, as well as the ability to actively vary change of the toe, which in the past had been passively changed based on external force on the tires. For example, when a conventional toe control arm attached to the vehicle body by a rubber bush is used, when lateral force is applied to the tire while turning, toe changes occur due to elastic deformation of the bush.
The active use of toe changes resulting from external forces is referred to as compliance steering. P-AWS, however, can control the toe angle without waiting for external forces to occur, and consequently, there is no delay throughout the entire range when acceleration or deceleration forces are applied during turning and control without any unnatural feeling is possible.
An examination of different situations reveals that in low speed ranges, steering the rear wheels in the reverse phase as the front wheels results in a decrease in the vehicle body slip angle, which is the deviation between the vehicle’s direction and the direction of travel, causing a feeling of turning inward and a sense that the vehicle will turn as the driver intended. If the slip angle is excessively changed, however, vehicle behavior differs from that of a conventional vehicle and leads to an abnormal sensation. Accordingly, control was carefully tuned and optimized.
Also, at low speeds, natural reverse-phase control without any abnormal sensation enables the vehicle to move easily and enhances maneuverability. This gives rise to an effect whereby the driver need not be as aware of vehicle size as the driver might think from looking at the actual vehicle.
Reverse-phase control

In-phase control
At high speeds, if the rear wheels are turned in phase with the front wheels, the vehicle body slip angle decreases and the phase delay of lateral acceleration is reduced, increasing vehicle stability and the feeling of stability. This is a major benefit of 4WS, but with P-AWS, the control rules are set such that the slip angle varies smoothly according to the vehicle speed, which increases the feeling of security at high speeds even further.
Generally, when turning with acceleration or deceleration, force is applied not only to the left and right, but also to the front and rear, and as a result, vehicle behavior is susceptible to influence. In the case of deceleration in particular, the load on the rear wheels decreases, which reduces the grip of the rear wheels and makes the vehicle more susceptible to spinning. With P-AWS, by adopting rear toe-in according to the vehicle speed and the front-rear acceleration, the fundamental stability of the vehicle can be enhanced in advance.
To-in control

On the other hand, when turning while accelerating, the load shifts to the rear wheels and the front ground contact load decreases, reducing the grip of the front wheels and making the vehicle more susceptible to turning outward. This tendency tends to be particularly strong on front-wheel drive vehicles, which use the capacity of the front tires on the drive side. P-AWS estimates the degree of difficulty of turning in advance based on the gas pedal position, gear position, front-rear acceleration, and other factors and controls the toe angle to increase the steering gain and eliminate turning difficulty.
P-AWS is characterized by controlling unstable behavior with high responsivity and natural movement, rather than controlling vehicle behavior after it has shifted in an unstable direction. This technology contributes to achieving at-will handling in all directions even at the limits while covering a wide range of everyday situations.