Hondaは、すべての人に『生活の可能性が拡がる喜び』を提供すべく世界中の一人ひとりの『移動』と『暮らし』の進化をリードすることと「交通事故ゼロ社会」の実現を目指しています。
その取り組みのひとつとして、人とわかり合えるHonda独自のAI、協調人工知能「Honda CI(Cooperative Intelligence)」を活用した CIマイクロモビリティ技術。
いつでも、どこでも、どこへでも、人とモノの移動を「交通事故ゼロ」・「ストレスフリー」で可能とし「自由な移動の喜び」を実感できる社会の実現を目指し研究開発しています。
Honda CIマイクロモビリティ
人とわかり合い協調する
交通事故ゼロ・ストレスフリーな移動を実現するために、人とわかり合い、周囲の環境と協調して人とモノの自由な移動をサポートするマイクロモビリティが必要と考えました。
2030年以降を想定した人々の移動欲求と課題
少子高齢化やますます多忙になると見込まれる未来の社会では、「移動」への意識にも変化が起こると考えられています。
高齢化社会では交通事故への不安が高まり、都市部では階段など高齢者にとって移動のしにくさが課題となります。少子高齢化は社会の労働力不足を招き、その結果、より多忙となった人々は移動時間の短縮を重視するようになるでしょう。さらに、ジェネレーションZ世代は、外に出かけて実際に体験したいという移動への欲求が高い一方で、運転への不安を抱えている人も多くいます。そうしたさまざまな欲求に応え、自由な移動を実現するためには、情報活用や完全自動運転、ロボットによるサービスだけでは十分解決できない課題を、新しい技術で解決することが必要となってきます。
2030年以降に想定される移動に対する要求と課題

「自由に移動する喜び」を拡げるために人とわかり合える協調人工知能「Honda CI」を開発
近い将来の身近な移動の課題を解決するには、新しい価値を持つモビリティが必要だとHondaは考えています。人の意図を理解し、高精度地図に頼らず周囲の道路環境を把握、他の交通参加者との協調、譲り合いや交渉を行いながら安全に自在な移動を行えるモビリティです。
そうしたモビリティを実現するためにHondaは、周囲の環境を認識しながら人とコミュニケーションを取り、意図や状況を理解し、自ら判断する先進的なAI技術、協調人工知能「Honda CI(Cooperative Intelligence)」を開発。そしてこれを活用し、自由な移動を実現する「Honda CIマイクロモビリティ」の研究を行っています。

移動へのニーズの高まりに応えるために、搭乗型のCiKoMa(サイコマ)※1と、徒歩での移動に追従するWaPOCHI(ワポチ)※1、2つのHonda CIマイクロモビリティの研究に取り組んでいます。
※1 CiKoMa:Cooperative Intelligent KOMA (「駒:仔馬」の意)
WaPOCHI:Walking Support POCHI(ペットのように寄り添って歩行での移動をサポートするロボットの意)

「CiKoMa」は1人~数人までの乗員数を想定したマイクロモビリティです。基本的に自動走行するため、運転に不慣れな人でも安全・安心に移動することができます。また、自動走行でありながら、ジョイスティックを使って右左折を指示し、自由に進路を選ぶことを可能にする研究開発も進めています。
必要な時に呼んで乗車し、任意の場所で乗り捨てという利用を想定しており、自在に走らせることができるため、ビジネスや観光、街なかのちょっとした移動など、気軽な移動手段となることを目指しています。


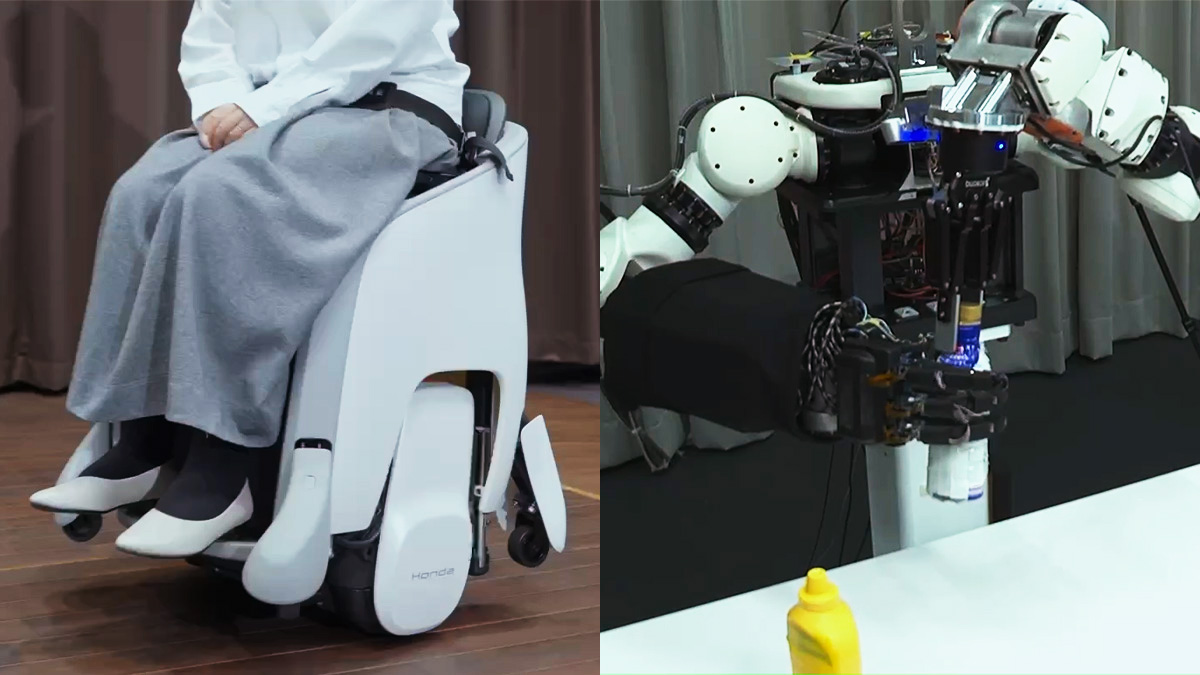
「WaPOCHI」は、ユーザーを認識し、歩行するユーザーに寄り添い移動するマイクロモビリティロボットです。ユーザーについていく追従と、ユーザーの前を移動する先導を行います。荷物を載せられるので、ユーザーは手ぶらで歩きを楽しむことができます。
追従は、さまざまな人の歩行を楽にし、先導は、人混みの中で通行人にぶつかることなく歩くことを可能とするため、高齢者などの歩行のサポートになると考えています。

茨城県常総市 技術実証実験の概要
CiKoMaは、来場者を対象にアグリサイエンスバレー常総内の「道の駅常総」から観光農園「グランベリー大地」まで、安全監視員が同乗しながら自動走行体験機会を提供します。
WaPOCHIは、いちご狩りの利用者を対象にグランベリー大地の屋外敷地内にて追従・先導の移動体験を実施します。
CiKoMaの技術
地図レス協調運転技術
人のように道を見て走る
既存の自動運転車が高精度地図を参照して設定された目的へ移動するのに対し、Honda CIモビリティは高精度地図を参照せず、人のように道路などを見て構造を理解し走る経路を決める、地図レスの自動走行が可能です。これにより、自動走行でありながら、設定された目的地に向かうだけでなく、自由な移動を楽しむことができます。
道路でもオープンスペースの公開空地※2でも
地図に頼らず自由に走行できる搭乗型マイクロモビリティ
※2 車道や歩道からのアクセスが可能で、建物周辺や公園等の一般に開放され自由に通行または利用できる区域のこと
あらかじめ設定された目的地へ移動する完全自動運転では、「この路地に入ってみたい」というような自由な移動は実現できません。また、一般的な自動運転が拠りどころとしている高精度地図を、奥まった路地や施設の敷地内まで作り込むのはコスト的にも現実的ではないため、自由に移動できる自動走行を実現するには、地図に頼らず、人と同じように「見て」道路構造を認識して安全に走行できなければなりません。ドライバーが操作などで与えた指示に対して、車線や交差点等を把握し、適切かつ安全に右左折等ができることも必要です。
さらに、人や自転車など周囲の交通参加者の行動も予測し、危険を回避して安全に走らせる制御も欠かせません。一方、車道のように区画線や縁石等がないオープンスペース(公開空地)で自由に走行するためには、障害物を認識、回避し、乗り心地も考慮しながら最適な経路を生成して走る機能も実現する必要があります。
■ 車道と公開空地では異なる機能が必要
車道と公開空地では認識対象、車両速度、走行ルールが大きく異なるため、地図レス協調運転の機能も別々に設定しています。

車道の認識:地図レス協調運転の制御


車線を認識して道に沿って自動走行 
曲がりたいときにジョイスティックを倒すと自動で右左折
■ 車道における地図レス協調運転の制御フロー
白線や停止線などの実在する線だけでなく、レーンなど人間が想定している道路構造もリアルタイムで認識します。認識された道路構造は地図と異なり時々刻々と変化するため、行動計画ではそのような変化に対応し、安定した舵角で右左折できるよう車両制御を行います。

公開空地の認識:軌道制御

■ 公開空地における地図レス協調運転の制御フロー
ステレオカメラの2つのレンズの視差から3次元点群を生成し、点群をグリッドベースで扱うことで障害となる立体物を認識。
障害物の高さが所定値以上の場合は通行不可領域と判定し、走行できる領域を高速に認識します。
次に、目標位置に対して大まかな最短ルートをリアルタイムで生成し、そのルートに沿って、障害物を滑らかに回避する軌道で走行します。

意図理解・コミュニケーション技術
言葉とジェスチャーを理解し対話する
ユーザーとモビリティがコミュニケーションを取りお互いの意図を理解し合うことができ、さらにモビリティが自ら考え提案することができれば、モビリティは、ユーザーの曖昧な移動指示に応えることが可能となります。
そのためには、言葉とジェスチャー、周囲の状況を理解する技術が必要となります。
人間同士のような自然なやり取りを実現する意図理解・コミュニケーション技術
将来、自動走行モビリティが普及した時代において、利用者が待ち合わせ場所や目的地の変更をモビリティに伝えるシーンを想定してみましょう。そのとき、スマートフォンのアプリを立ち上げ、場所を入力し指定するやり方では、煩わしいだけでなく、直前の変更などでは間に合わないケースも生まれます。まるで人同士がコミュニケーションをするように、モビリティが人の言葉やジェスチャーを理解できれば、スムーズに移動する意思を伝達することが可能です。人がモビリティに合わせるのではなく、モビリティと人が相互に理解しながら移動する。Honda CIは、そんな思いのままの移動の実現に挑んでいます。
① 対話によるユーザー特定
CiKoMaはまず、GPS情報をもとにユーザーがいるおおよその場所に移動し、カメラの画像認識でユーザーを探します。手を振るなどのジェスチャーを理解し特定したり、その付近に複数の人がいた場合は、それぞれの候補から特徴的な違いを判断して、どの特徴について質問すれば最短でユーザーを特定できるかを自動で計算。少ない質問でユーザーを特定します。
CiKoMaのカメラ画像

② 言葉とジェスチャーの統合理解
人は言葉に加え、指差しで移動したい方向を示すことが少なくありません。例えば、自販機が複数ある状況でユーザーが「あっちの自販機に行って」と指差しながら指示した場合、CiKoMaはまず指示からキーワードの「自販機」を抽出。さらに、独自の画像認識によって指差し姿勢を3次元的に理解し、ユーザーが意図している方向を推定。これらの情報を統合的に理解し、まるで人間同士のやり取りのように、ユーザーが意図する目的地をスムーズに特定します。
CiKoMaのカメラ画像

③ 周囲の状況を考慮した停止位置の提案
ユーザーの指示した位置がCiKoMaの停止位置として必ずしも適切とは限りません。例えば、ユーザーが「クルマの所に停めて」と指示した場合、CiKoMaは事前に登録したルールやマナー、危険度などの知識をもとに、クルマの周辺は危険であると判断。「危ない場所のため、コーンの近くに停車していいですか?」と、その位置が不適切な理由も説明しながら、新たな移動先をユーザーに提案します。
CiKoMaのカメラ画像

【動画】CiKoMaの実証実験映像
研究施設からリアル環境にステージを移し、ロケーションに合わせた技術を搭載た車両で歩車共存エリア(歩行者と自転車との混合空間)での技術実証実験に取り組んでいます。
WaPOCHIの技術
ユーザーの特徴の記憶・特定技術
ユーザーの風貌を記憶
WaPOCHIは、ユーザーを認識し、ユーザーとともに荷物を載せながら移動するマイクロモビリティロボットです。ユーザーから手荷物を持つという負担を解放し、より快適な歩行をサポートします。
服の色や髪の毛の色、背格好などの特徴を画像で認識してユーザーを記憶します。
認識に使うのは、上部に設置された前後左右複数のカメラです。自分の周囲360度を立体的に捉え、AIでユーザーの特徴量を抽出しトラッキングします。追従・先導中に他の歩行者の陰などに隠れてユーザーを一瞬見失っても、記憶した特徴から探し出し、追従・先導に復帰できるよう設計されています。今後は、行きたい方向を指差すなど人のジェスチャーも認識し、追従・先導の精度を高め、よりスムーズな移動ができるよう研究を続けていきます。

■ WaPOCHIのユーザー記憶・特定システムイメージ
ユーザーの位置情報に加えて外見的特徴をカメラで捉え、記憶して追従・先導し続けます。直前の認識時にユーザーがいた位置から近い位置にいる歩行者で、かつ画像から得られる特徴が最も近い歩行者をユーザーとして特定します。

追従・先導技術
ユーザーを見失わず追従
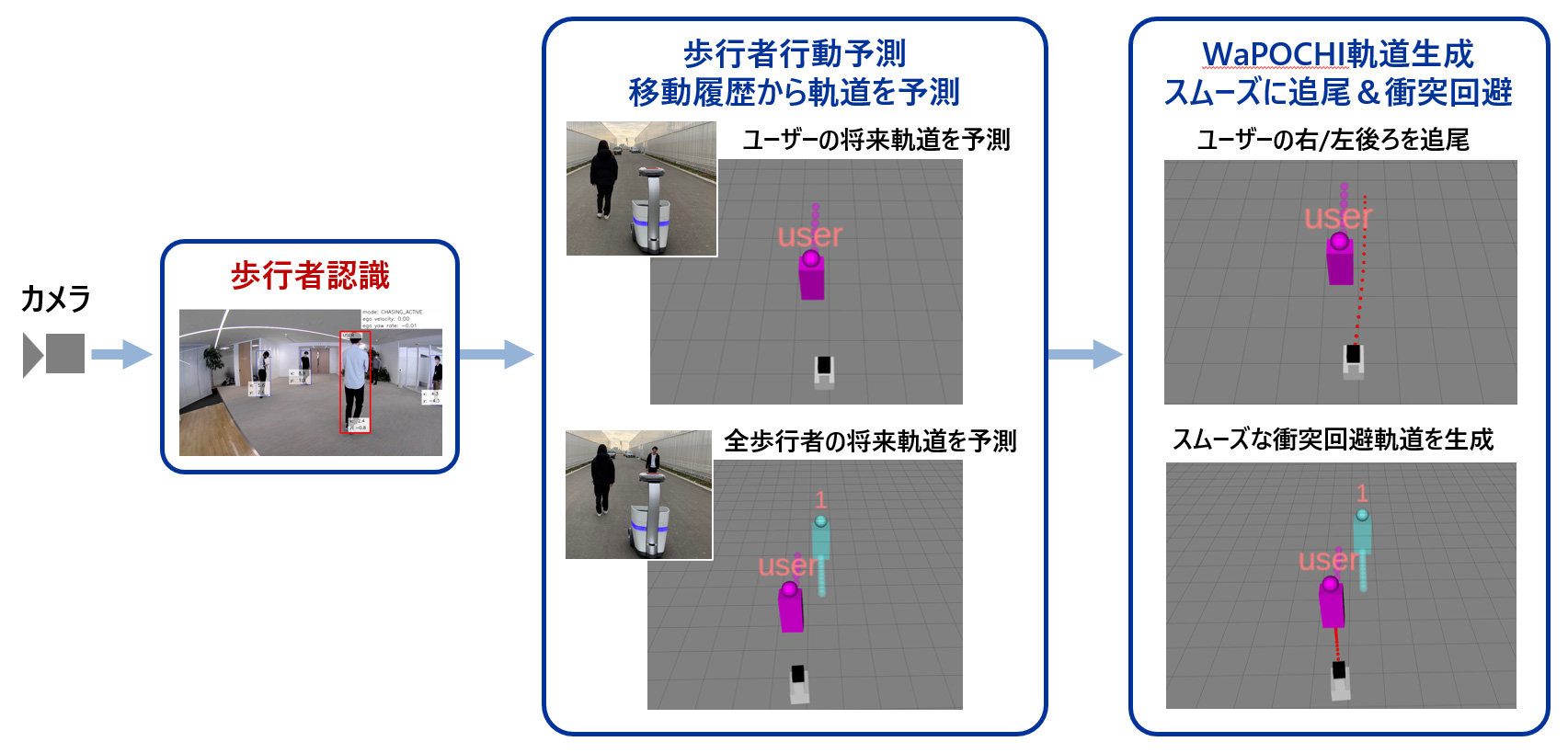
認識・記憶したユーザーの後ろを、ペットのようについて行きます。歩行者の行動を先読みし、衝突リスクを考慮した軌道を生成します。受け身的な動きではなく、人間のようなスムーズな回避行動をとることで、人混みでもユーザーを追い続けます。前を行くユーザーから見えやすいように斜め後ろを追従するように設計しており、ユーザーを人混在下で追尾し続けるためには、高度な歩行者認識技術と軌道生成技術が必要となります。

ユーザーがWaPOCHIの存在を認識しやすいよう、真後ろではなく斜め後ろを追従 
ユーザーと同じような服装や背格好の人が交錯しても、ユーザーの特徴を捉え続け、的確に追従
ユーザーの行きたい方向を推定しながら先導
先導は、事前に目的地を設定せずに、後方のユーザーの歩く速度や方向、身体の向きから行きたい方向を推定することを基本としています。加えて、道の形状によって多くの人は同じ経路を辿るという人流の解析データも活用し、行き先の推定に役立てています。

また、ユーザーが歩きやすいように先導するためには、周囲の人を避けるだけでなく、場合によってはかきわけて進むことも必要となります。比較的空いているエリアではWaPOCHIはユーザーの斜め前を走行しますが、周囲が混雑してユーザーの歩行が妨げられる可能性がある場合は、WaPOCHIはユーザーの正面前に出て、ユーザーの歩行スペースを守るように走行します。その上で、経路に入って来そうな人に対して協調行動を促し、WaPOCHIが存在感を出すことで、ある程度人の自然な回避を想定した経路をつくり出す機能も備えています。
さらに、スマートフォンを見ながら歩く人など、勢いよく経路に入ってくる人に対しては光や音を発し、効果的に周囲の人に避けてもらえるような経路をつくっていくことも行います。ただ、停止している歩行者をわざわざ動かすなど、人の動きを大きく変えることは行わず、周囲の環境と協調しながら最適な先導を行います。

通常走行時は、ユーザーが前を見やすいように斜め前を先導 
人混みのなかを先導する時は、ユーザーの前に空間を確保するために正面前を走行 
先導している軌道の前方に他の歩行者が入ってきそうなときに協調行動を促す
意図理解・コミュニケーション技術
ユーザーの言葉やジェスチャーで動きを制御
WaPOCHIは現在、「ついてきて」「先に行って」「待っていて」というユーザーの言葉を理解し、追従・先導・待機動作を行います。
ジェスチャーによるコミュニケーションは、現在「ストップジェスチャー」により先導を停止する機能を実現しています。さらに今後、ユーザーが行きたい方向を指差すジェスチャーを理解して進行方向を決定する機能の開発も行っていきます。


【動画】WaPOCHIの実証実験映像
研究施設から一般の施設にステージを移し、追従・先導の徒歩移動をサポートする技術実証実験に取り組んでいます。
AIの専門家ではなく、自動車などを作ってきた
研究者だからこそ革新を実現できたと思います。
私たちは自動車開発に携わる研究者であり、AIの研究者ではありません。AI研究者は、課題解決のためにAIを徹底的に深めて解決しようとしますが、我々はそこにこだわりはありません。目指すソリューション実現のために生かせるさまざまな開発経験があり、応用できる制御技術のノウハウがあります。
実際に、パワートレーンや車体制御などでHondaが得意としていた、最適制御もしくはロバスト制御、適用制御などの制御理論のノウハウを取り入れることで、Honda CIマイクロモビリティの自動走行の精度を高めています。そのようなHondaならではのアプローチを行うことで、地図をベースとしない自動走行システムをはじめとした革新技術を生み出すことができました。
また、研究者が自ら実車でテストドライバーを務めるのも他にはない取り組みだと思います。研究者とテストする人を分けていると、現場・現物・現実のフィードバックがないため、膨大なデータを眺めるしかありません。課題に詳しい研究者が実際に試作機に乗ることで、どんな不具合があり、どんな欠点があるか、机上で想定していたことと違うどのようなことが起きているかを五感で認識し、課題解決のアイデアを発想できたのだと思います。
CiKoMaとWaPOCHIの研究は、現在実証実験を重ねる段階に入っています。実証実験で得られた知見を生かし、さらにHonda CIマイクロモビリティの技術を進化させていきます。技術でサポートすることで将来、さまざまな人に、より自由な移動を安心して楽しんでいただき、活気ある生き生きとした社会づくりに貢献できればと考えています。
-

株式会社 本田技術研究所
先進技術研究所 知能化領域
エグゼクティブチーフエンジニア
安井 裕司(やすい ゆうじ)