製品
交通事故ゼロ社会に向けたHondaの回答。トラフィックジャムパイロットはどうして生まれた?[アーカイブ掲載]
![交通事故ゼロ社会に向けたHondaの回答。トラフィックジャムパイロットはどうして生まれた?[アーカイブ掲載]](/content/dam/site/global-jp/stories/cq_img/131-2403-hondasensingelite-engineer-interview-/social.jpg)

LEGEND自動運転(AD※1)/先進運転支援(ADAS※2)領域開発責任者 もっと見る 閉じる 九鬼 廣行(ふりがな)
さらに表示
Honda SENSING Eliteシステム開発 開発責任者 もっと見る 閉じる 加納 忠彦
さらに表示※1 :AD:Automated Driving
※2 :ADAS: Advanced Driver-Assistance Systems
目指したのは先進運転支援システムを進化させ交通事故ゼロ社会の実現に近づくこと
今回、トラフィックジャムパイロット(渋滞運転機能)をいち早く市販車に搭載した想いをお聞かせください。
 Honda SENSING Elite搭載のLEGEND
Honda SENSING Elite搭載のLEGEND
2003年に追突軽減ブレーキ(CMS)を世界で初めて実現するなど、安全運転支援技術の進化に情熱を注がれています。
やはり、根幹に交通事故ゼロ社会を実現したいという想いがあるからです。2003年以前も、国産車で初めて3点式シートベルトやエアバッグを装備したり、先進安全自動車ASVの研究に取り組んだり、世界で初めて屋内型の全方位衝突実験施設をつくるなど、さまざまな取り組みを行っています。トラフィックジャムパイロット(渋滞運転機能)は自動運転レベル3を他に先んじて実現したいと考えて取り組んだわけではなく、先進運転支援システムを進化させることで、より多くの方に自由な移動と新たな移動の喜びを提供したいという想いから実現したものです。
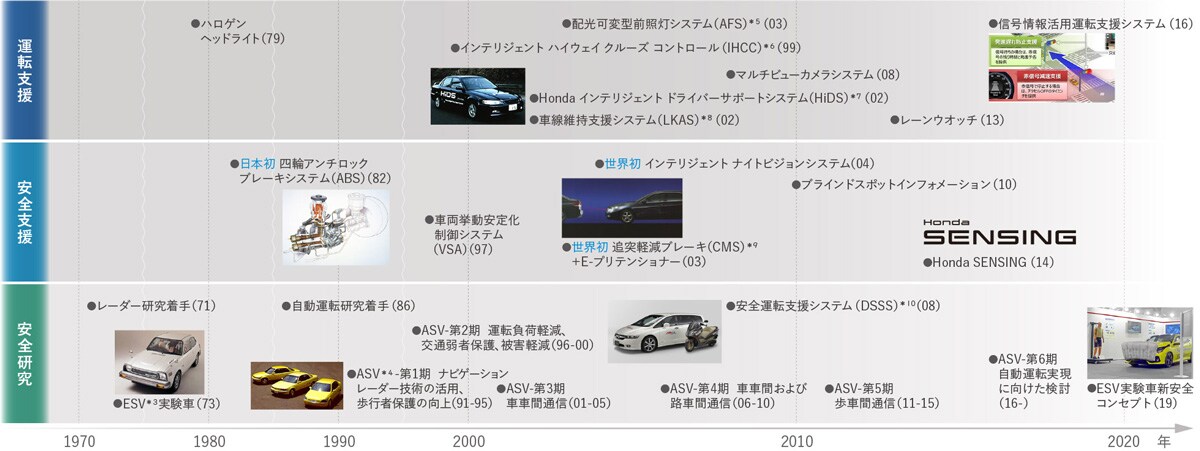 Honda安全運転支援技術のあゆみ
Honda安全運転支援技術のあゆみ
※3:Experimental Safety Vehicle。実験安全車
※4: Advanced Safety Vehicle。先進安全自動車
※5:Adaptive Front Lighting System
※6:現在のアダプティブクルーズコントロール(ACC)
※7:Honda intelligent Driver Support System。写真は公道テスト車両(00)
※8:Lane Keeping Assist System
※9:Collision Mitigation brake System。現在の衝突軽減ブレーキ(CMBS:Collision Mitigation Braking System)
※10:Driving Safety Support Systems。安全運転支援システム
根幹にあるのは、より安心安全な移動を実現するために自動運転技術を進化させたいという想いです。究極の目標である交通事故ゼロ社会の実現を目指し、自動運転技術を進化させながら、Hondaの安全運転支援技術全体を一歩一歩進化させることを目指しています。
レベル3とレベル4以上は技術的に別物。その両方を進化させることが重要
トラフィックジャムパイロット(渋滞運転機能)から着手したのは?
レベル3で最初に実現される機能はトラフィックジャムパイロット(渋滞運転機能)になるということは、ある程度国際的なコンセンサスがありました。その理由は、高速道路でのクルマ同士の追突や接触は、低速時がとても多いという事故実態があるからです。もちろん、渋滞時の制御なので速度が低く、第一歩としてシステムを作り上げるのに適していることもあります。
トラフィックジャムパイロット(渋滞運転機能)は、ハンズオフ機能付車線内運転支援機能で高速道路を走行中、渋滞に遭遇すると、システムが前後に走行車両があることを確認すると作動します。カメラやライダー、レーダーで360°センシングしている上に、アンテナから高精度のGNSS(Global Navigation Satellite System / 全球測位衛星システム)情報を受信し自車位置を判断しています。また、ドライバーの状態も見ていて、居眠り、わき見などで運転者が正しい運転姿勢でないかを把握しています。システムからの引継ぎ要求に確実な対応を促す必要もあり、技術的に相当難易度の高い開発となりました。
主な走行環境条件
1. 道路状況及び地理的状況
道路区間:高速自動車国道、都市高速道路及びそれに接続される又は接続される予定の自動車専用道路(一部区間を除く)
除外区間/場所:自車線と対向車線が中央分離帯等により構造上分離されていない区間、急カーブ、サービスエリア・パーキングエリア、料金所など
2. 環境条件
気象状況:強い雨や降雪による悪天候、視界が著しく悪い濃霧又は日差しの強い日の逆光等により自動運行装置が周辺の車両や走路を認識できない状況でないこと
交通状況:自車が走行中の車線が渋滞又は渋滞に近い混雑状況であるとともに、前走車及び後続車が自車線中心付近を走行していること
3. 走行状況
自車の速度:自車の速度が自動運行装置の作動開始前は約30km/h以下、作動開始後は約50km/h以下であること
自車の走行状況:高精度地図及び全球測位衛星システム(GNSS(Global Navigation Satellite System))による情報が正しく入手できていること
運転者の状態:正しい姿勢でシートベルトを装着していること
運転者の操作状況:アクセル・ブレーキ・ハンドルなどの運転操作をしていないこと
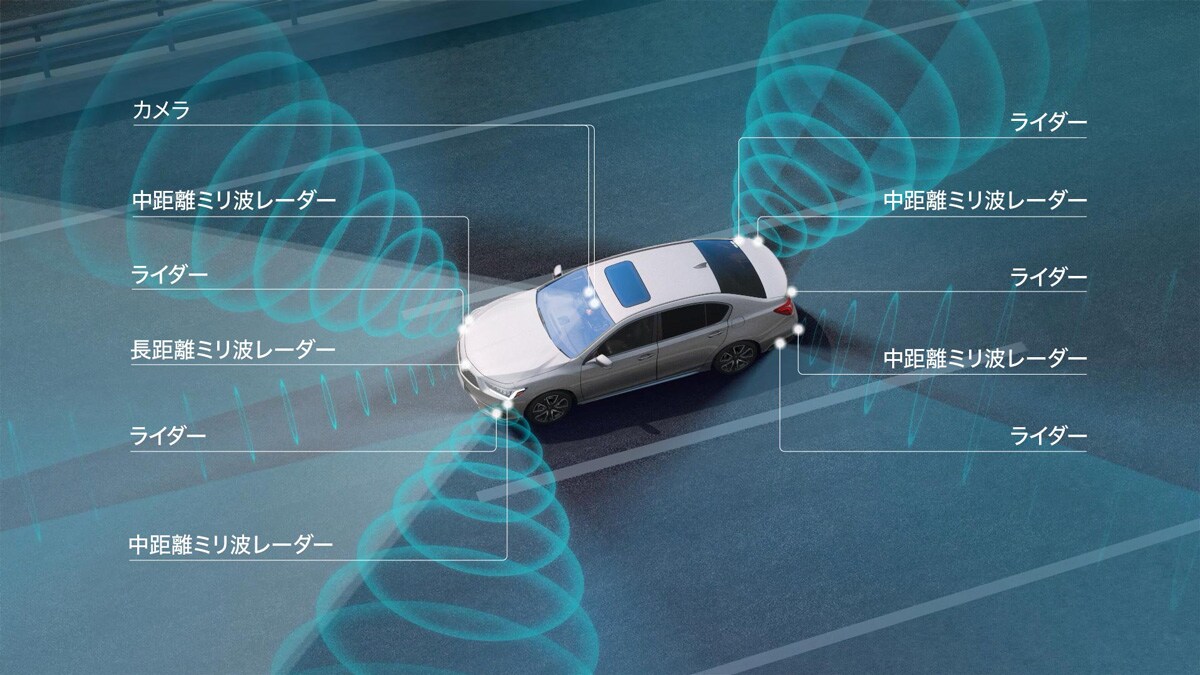 自車周辺360°をカバーするHonda SENSING Eliteのセンサー。多数の外界認識用センサーで自車周辺360°の状況を検知します
自車周辺360°をカバーするHonda SENSING Eliteのセンサー。多数の外界認識用センサーで自車周辺360°の状況を検知します
そういう意味で、レベル3はきわめて高度な制御が必要です。自動運転のレベルは数字で分けられていますから、レベル4の方が技術的に難しいと思われている方が多いと思います。どちらが難しいかは一概には言えず、レベル3とレベル4は技術的に大きく異なります。レベル4で開発が行われているのは、現状では乗員が運転をしないシェアカーの技術です。それに対し、レベル3のトラフィックジャムパイロット(渋滞運転機能)は、ドライバーにも運転を受け渡すパーソナルカーの技術です。
我々は高速道路を前提に、ドライバーが普通に運転するときもあるし、レベル3の機能を使うときもあり、レベル2の機能を使うときもあるパーソナルカーの開発をHonda内部で進めています。
もちろん、レベル4の研究も重要です。我々はどちらの研究も行い、先ほども申し上げたように、より多くの方に自由な移動と新たな移動の喜びを提供したいという意志を持って開発を行っています。
より多くのドライバーが安心して走行できるパーソナルカーの運転支援を世の中に広めていくためには、レベル3の技術開発が非常に重要だと考えています。
自動運転レベル3の意義
日本政府は自動運転のレベルを5つに分類・定義しています※11。レベル1~2では、運転操作※12の主体はあくまでもドライバーにあり、システムは運転支援に留まりますが、レベル3では高速道路渋滞時など特定の走行環境条件※13を満たす限定された領域において、システムが周辺の交通状況を監視するとともにドライバーに代わって運転操作を行うことが可能となります※14。
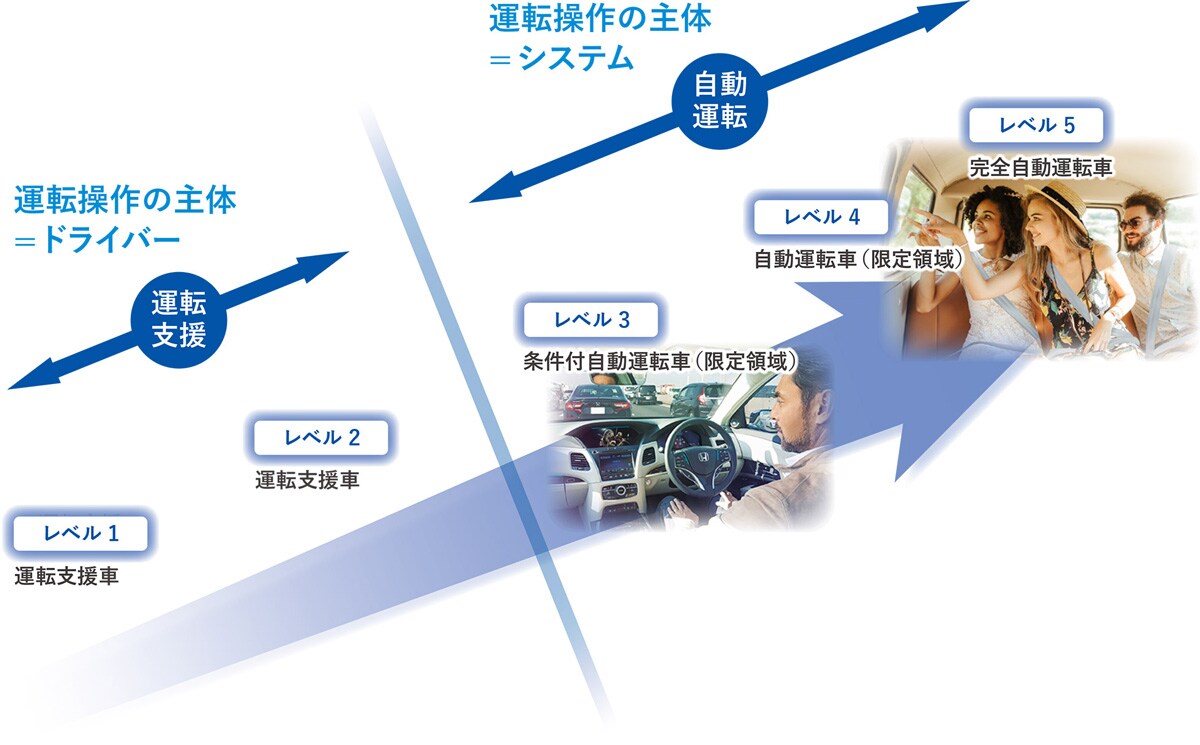
※11:SAE International(米国に拠点を置く自動車技術者協議会)の定義(J3016)に準拠
※12:車両の操縦のために必要な、認知、予測、判断及び操作の行為を行うこと
※13:特定の走行環境条件とは、場所(高速道路のみ等)、天候(晴れのみ等)、速度など自動運転が可能な条件。この条件はシステムの性能によって異なる
※14:システムが使用可能な条件から外れる場合は、警報を発して直ちにドライバーに運転交代をすることが求められます
安全とは何か、どう対応し検証するかを考えシステムで対応する高度な制御を実現
では、トラフィックジャムパイロット(渋滞運転機能)の実現で困難だったことは?
トラフィックジャムパイロット(渋滞運転機能)は、ドライバーから運転を引き継いだ時点で運転操作をシステムが実行しなければいけません。システムが運転しているときは、システムからの引継ぎ要求があった場合、ドライバーは直ちに運転操作が可能な状態を保つ必要はありますが、車載ディスプレイで動画視聴も可能なわけですから。普段の運転でドライバーが何気なく行っている運転操作は、実は非常に高度な環境認識と予測制御を行っているので、それをシステムが実行するためには高度な技術が必要とされます。
何を安全と定め、それにどう対処し、安全であることをどう検証していくかというところから考えなければならなかったことが一番難しかったと思います。「合理的に予見される防止可能な事故が生じない」「制御系・センサー系の冗長性確保によるシステムの安全性の確保」「システムから運転者に運転が引き継がれない場合、最終的に車両を自動で安全に停止」が自動運転車の安全技術ガイドラインに盛り込まれていますから、それをどう実現するかという課題です。きめ細かなシミュレーションも行いましたが、最後は乗って、走って、徹底的に検証しました。トータルで130万キロにおよぶほど膨大な実証実験は、今までの開発では未経験。その検証は大変でもありましたが、運転しながらいろいろなことがわかってきたので、楽しい開発でもありました。

Honda SENSING Eliteシステム制御系プロジェクトリーダー もっと見る 閉じる 荒木 光浩
さらに表示
トラフィックジャムパイロット(渋滞運転機能)開発担当 もっと見る 閉じる 八代 勝也
さらに表示
システム担当プロジェクトリーダーとしては、システムがクルマを制御するという前例のない技術でしたので、ドライバーが認知・制御していた今までの延長線上ではなく、どうやって品質確保するかを主眼に置き開発を進めました。従来の開発手法や概念ではなかった、システムがクルマを動かすために重要となる安全性と商品性において、お客様に受け入れられる両立解を実現しなければなりません。そのため、多くの関連部署のプロジェクトリーダーに急で困難な変更要求を依頼し、その都度日程含め調整することが苦労の一つでした。新しいものを世に出すという気概を持ち、多くの仲間と意思統一しながら開発していきました。
制御開発担当として、机上で開発するだけではなく、公道で膨大な時間をかけて実際に乗って、走ってクルマを仕上げていきました。トラフィックジャムパイロット(渋滞運転機能)だけではなく、ハンズオフ機能付車線内運転支援機能やハンズオフ機能付高度車線変更支援機能も含めて検証したわけですが、基準をクリアするというスタンスだけではなく、自分たちが納得できるというか、自分たちがいいと思えるものをつくるというのがチームの共通認識としてありました。トラフィックジャムパイロット(渋滞運転機能)をいち早くつくるのがゴールではなく、お客様により安全に自由な移動を楽しんでもらうために、より高度な技術を提供するというゴールを、チーム全員が目指していました。もちろん、世界的にいち早く技術を実現することはなかなかある機会ではないので、すごくいいモチベーションになり、苦しい場面もたくさんありましたが、そういう意味で頑張れたという気はします。
他に制御面で難しかったことは?
複数センサーを使うことの難しさもありました。外界センサーは前方のフロントセンサーカメラ、全周囲のレーダーセンサーやライダーセンサーから構成されています。それらから受信する情報を正しく使うのはセンサーフュージョンと呼ばれる技術で、高い技術が要求されるものです。単純に各センサーからの情報を混合させてしまうと、例えばあるセンサーが不得意なシチュエーションだった場合に誤差を大きく含む情報に影響を受けて車両の挙動に影響を与えます。そのため時系列にデータを監視するなどの対応により、異常なデータの影響を受けないようにする対処が必要となります。
各センサーの得意不得意を把握し、それぞれの長所を活用できるようにセンサーを使いこなすことがポイントの一つと考えています。
複数センサーがあるがゆえに、検証すべき組み合わせがとてつもなく多いという感じですね。センサーの組み合わせ方によって、クルマの挙動が変化します。また、センサーを切り替える場合に連続的に制御しているかという問題があります。例えば、前走車をレーダーセンサーで補足している場合と、ライダーセンサーで補足している場合では、センサーの特性によってクルマの挙動が変わるため各センサーに合わせて多くの組み合わせを切り替えも含めて検証したことが苦労した点ですね。
 Honda SENSING Eliteテスト車両
Honda SENSING Eliteテスト車両
 テスト車両による徹底した実証実験を実施
テスト車両による徹底した実証実験を実施
 テスト車両による実証実験
テスト車両による実証実験
 テスト車両による実証実験
テスト車両による実証実験
当然ですが、走れば良い、検証すれば良いということではありません。そのシステムが引き起こす可能性がある不安全な事象を抽出し、どんな要因から不安全な事象に至るのかを、FTA※15という仕組みを使って分析していき、安全要求を導出するんですね。そして、その安全要求がすべて満たされるように設計し、検証を行うわけです。とはいえ頭の中で考えていることなので、漏れていることがあるかもしれません。それに対して実証実験で、自分たちが初期に想定していなかったことが起こっていないかも確認します。もし起こっていたら、設計にフィードバックして潰し込むことを繰り返します。それを徹底して行った結果、走行距離が130万キロだったということです。
※15:FTA(=Fault Tree Analysis)とは、演繹的システム解析の一手法であり、望ましくない事象の原因となっている、より基本的な障害の連鎖を系統的に構築する手法。
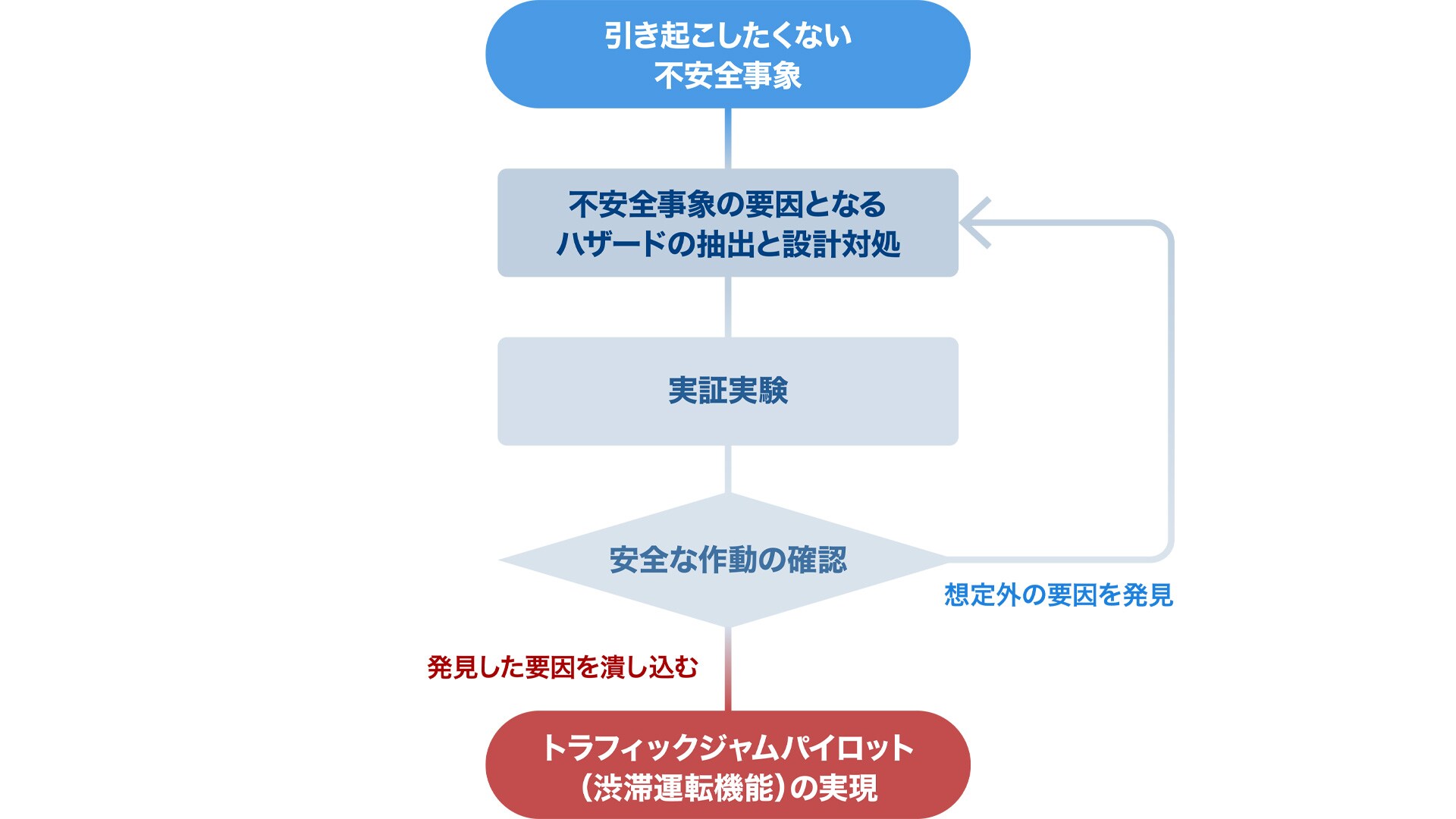 トラフィックジャムパイロット(渋滞運転機能)システム構築の概念図
トラフィックジャムパイロット(渋滞運転機能)システム構築の概念図
具体的には実証実験はどのようなことを行ったのでしょうか?
テストコースで繰り返し検証して設定したシステムが、実際の高速道路で安全に作動するかの確認になります。実際にハンドルを握ってテストを行うのは、専任のドライバーの方です。走行して上がってきたデータを確認し、不安全な事象が発生する可能性がある場合、どんなに遠い場所であっても実際にその現場まで行きシステムに修正を加えました。実証実験を行うことで、机上での検討やテストコースでの検証だけでは見つけることができない不安全要因を効率的に見つけることが可能になりました。
実際にはデータを見るだけでも修正はできます。しかし、そのやり方を間違ってしまうと、商品性を削る方向に行ってしまうんです。安全性を確保しながら商品性を犠牲にしない修正を行うために、彼らは現場に足を運んで、自分たちの目で確かめながら信念をもってやってくれました。山のように仕事が詰まっている中で(笑)。
我々から見れば、遠いところにある高速道路の1箇所のように思えるかもしれませんが、そこの近郊に住んでいらっしゃるお客様にとっては、毎日通勤で使用する道路かもしれません。そのため我々は様々なお客様を想定し、ときに現場まで足を運び安全性と商品性を確立できるよう開発を続けました。
我々はお客様が普段使うパーソナルカーとして、トラフィックジャムパイロット(渋滞運転機能)を提供したかったという想いがあるからですね。
開発を続ける中で、機能が成熟してくることで自分たちとしても疲労感の少なさや機能の快適さを感じられるようになり、機能の価値を実感するとともに自信をもって提供できました。
これまでの車線維持支援システム(LKAS)からハンズオフへの移行はどのような難しさがありましたか?
これまでの車線維持支援システム(LKAS)は、ドライバーが常にハンドルを握っているので、車両の挙動が変化してもすぐに反応することができます。ハンズオフではハンドルから手を離しているので、急な車両挙動を起こしてはいけないし、システムが制御を継続できない状態になることを検知・判断し、確実にドライバーに運転操作要求を出さないといけないんです。
車外の状況をセンシングするデバイスは、誤検知を起こす可能性がゼロではありません。そういったところを精度の高い地図とカメラで認識した車線の両方を使って、「しっかり車線を維持できているか」とか、「今後車線を維持できなくなるかもしれない」など、走路を正しく認識できているかを常に監視し、認識できていないと判断したときには、確実にハンズオフをやめられることが非常に重要です。
では、トラフィックジャムパイロット(渋滞運転機能)への移行はどのような難しさがありましたか?
渋滞時の前走車追従なので、前のクルマについて行って前走車が減速したらブレーキをかけること自体は、渋滞追従機能付アダプティブクルーズコントロール(ACC)と変わりません。例えば割り込みに対しても当然制御を行うのですが、トラフィックジャムパイロット(渋滞運転機能)はシステムが運転を代行しているので、そこで起こる事象をシステムが検知して対応しないといけない。したがって、制御には高い性能が求められます。センサーも当然増えてくるし、高度な予測制御を導入し、あらかじめ周辺車両がどんな動きをするか予測し、割り込み車や合流車に対してブレーキをかける制御を行います。ドライバーが必ずしも前を向いている訳ではないので、システム一つひとつについて高い次元の制御レベルを実現していくところが一番難しかった点です。
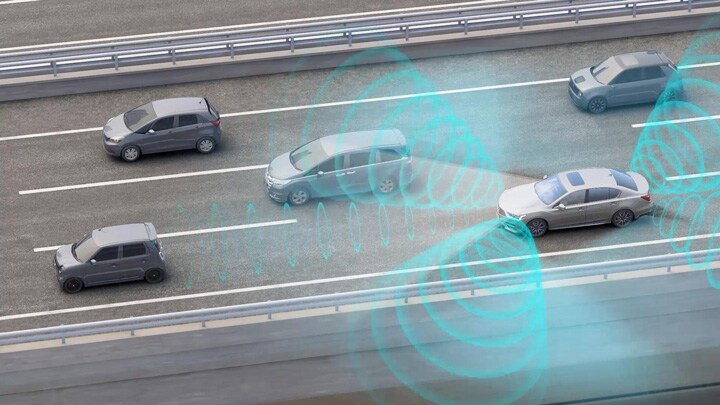 トラフィックジャムパイロット(渋滞運転機能)作動時のセンシングイメージ
トラフィックジャムパイロット(渋滞運転機能)作動時のセンシングイメージ
システムが制御するということは前例がないので、これをやればいいというものが存在しないんです。例えば高速道路のIC入口で高速道路に進入してくるクルマに対してスムーズに合流を行うかということから考え、どう検証するかということと、何よりお客様に受け入れていただける動きになっているかまで考えることは相当難しい開発でした。
やはり、割り込みに対する制御は難しい?
隣接車線の車両の動きを常に監視し、横方向の速度や車線との位置関係、車両の角度などさまざまな情報を元に自車の前に割り込んでくるかを予測し、その予測結果に基づき必要なブレーキをかけます。割り込んでくる車両には大きなトラックや乗用車などさまざまなタイプがあり、実際にテストコースにおいてさまざまなタイプの車両を用意し検証を実施しました。
レベル3であるトラフィックジャムパイロット(渋滞運転機能)では、作動条件の範囲内においてはシステムが制御するという観点から、作動遅れがないようにしなければいけません。一方で割り込み車両に対して減速の感度を上げることは簡単ですが、必要以上に感度が高い場合過剰作動を引き起こすため、これらのトレードオフ関係のバランスをとることが重要です。トラフィックジャムパイロット(渋滞運転機能)の場合、ドライバーが車載モニターで動画視聴していることも想定し、安全性と商品性の高いレベルでのバランス設計にこだわり、厳しい基準をもって設計と検証を行いました。
渋滞の中を二輪車がすり抜けてきたら?
設計的に二輪車に対してどう扱うかということから考える必要があります。トラフィックジャムパイロット(渋滞運転機能)は前走車追従であり、前走車が走っているということは自分も走れる道路だと考えます。前走車が二輪車の場合、自分の前でサッと避けられて障害物がいきなり発生することも考えられるため、二輪車に追従させないという設計になります。また、二輪車が横をすり抜けてきて自車の前に急に入って来ることを想定すると、自車の周辺に二輪車が過度に接近しているとトラフィックジャムパイロット(渋滞運転機能)をやらないなど、さまざまな不安全事象を挙げ、それに対してどう対処するかを一つひとつ詰め、どういう振る舞いで実現させるのかを設計していくわけです。

LEGEND開発チーム 電装領域プロジェクトリーダー もっと見る 閉じる 安原 俊幸
さらに表示※16:ヒューマン・マシン・インターフェイス
トラフィックジャムパイロット(渋滞運転機能)のヒューマン・マシン・インターフェイス(HMI)については?
トラフィックジャムパイロット(渋滞運転機能)に遷移するまでの流れを整理すると、まずドライバーがHonda SENSING Eliteの渋滞追従機能付アダプティブクルーズコントロール(ACC)と車線維持支援システム(LKAS)の運転支援を開始し、システムの作動条件を満たすと自動的にハンズオフが可能な「ハンズオフ機能付車線内運転支援機能」に遷移します。その状態で渋滞に遭遇すると、トラフィックジャムパイロット(渋滞運転機能)が作動します。
渋滞追従機能付アダプティブクルーズコントロール(ACC)と車線維持支援システム(LKAS)はこれまでと同じグリーンのメーター表示のみで、「ハンズオフ機能付車線内運転支援機能」に遷移すると新しい制御レベルに入ったことがわかるようブルーのメーター表示に変え、ハンズオフが可能な状態を認知できるようハンドル部分にもブルーで点灯するHonda SENSING Elite表示灯(以下 表示灯)を配置しました。さらに、トラフィックジャムパイロット(渋滞運転機能)に遷移すると、メーターは2眼のアナログメーターが消え、ナビ画面上とグローブボックスの上にもブルーの表示灯を加え、ナビ画面でテレビやDVDの動画視聴やナビの目的地設定や検索などが可能なトラフィックジャムパイロット(渋滞運転機能)に移ったことを認知できるようにしました。明るいブルーで光るHonda SENSING Eliteの作動状況を通知する表示灯は、これまで車内で使用したことがなく、トラフィックジャムパイロット(渋滞運転機能)に遷移したことを瞬間的に認知しやすく、オレンジの警告色と反対色であることからも採用しました。
「条件付自動運転」のヒューマン・マシン・インターフェイスという前例のない開発でしたので、作動状況や走行状態を的確に伝え、必要時にはシステムからの引継ぎ要求に確実な対応を促すインターフェイスを開発初期段階で構築するため、「HMIシミュレーター」という検証機材を制作しました。その「HMIシミュレーター」には、外界の走行動画と、メーター、ナビゲーション、表示灯とハンドル動作がすべて連動する装置をモックアップに搭載し、企画段階から徹底した早期検討を行い、さらに「HMIシミュレーター」を用いて幅広い年齢層やHonda SENSINGの初見者から熟練者に対する徹底したユーザビリティー調査を実施しました。
 トラフィックジャムパイロット(渋滞運転機能)作動状態のHMI
トラフィックジャムパイロット(渋滞運転機能)作動状態のHMI
 トラフィックジャムパイロット(渋滞運転機能)引継ぎ要求のHMI
トラフィックジャムパイロット(渋滞運転機能)引継ぎ要求のHMI

Honda SENSING Elite HMI開発担当 もっと見る 閉じる 藤巻 浩一
さらに表示
今回のHMIの開発では、レベル2からレベル3となったことを「誤解なくドライバーに認識してもらう」というHMIとして当たり前の部分と、「レベル3という別次元の制御に入ったことを伝える」という要素を調和させる課題がありました。ドライバーにレベル3を認識してもらうためには、レベル3を強調したHMIにすればよいのですが、単に強調しただけでは煩わしくなってしまいます。そこで、レベル3のインジケーターの適切な配置や、2眼のアナログメーターを消してシンプルな表示とする手法により、レベル3であるという新しい世界観を創りながら、明確かつシンプルなHMIを目指しました。
トラフィックジャムパイロット(渋滞運転機能)からドライバーへ運転操作を戻す際には、即座に着実に運転操作を再開してもらうために、メーター、ナビ画面上とグローブボックスの上のブルーの表示灯を反対色であるオレンジに変え、警告音とともにメーター上にハンドルマークを点滅させ、ナビ画面にも運転を促す表示をさせるなどの対応を行いました。それらの通知を、ドライバーが故障と勘違いしないよう、点灯色の扱い、点滅の速度や警報音の鳴らし方にこだわりながら微妙な調整を行い実現していきました。
制御に合わせた通知タイミングを調整したり、また引継ぎ要求やハンズオフ付高度車線変更機能が作動する際のガイダンス音声の発話イントネーションは、ナレーション録音現場に立ち会い、数十パターンに及ぶ発話イントネーションを変化させたガイダンス音声の録音を行い、その中からドライバーの気持ちに寄り添う音源を選択するなどの設計配慮を行いました。
制御のエキスパート、表示意匠/文言のエキスパート、警報音のエキスパートの意見を結集させ、徹底的に議論を尽くし、全員が納得できるところを狙いながら実証していきました。
HMIシミュレーターの制作や徹底したユーザビリティー調査を行うことで、より多くの人に体感してもらい、様々な意見をもらう中でHonda SENSINGの熟練者にも煩わしくなく、初見者にもシンプルでわかりやすい瞬間認知性に優れたシンプルなインターフェイスを構築することでユーザビリティー調査でも高評価を獲得しました。
 HMIシミュレーター
HMIシミュレーター
 HMIシミュレーター
HMIシミュレーター
安心してトラフィックジャムパイロット(渋滞運転機能)を使用できるよう、いま説明があったようなHMIを新しく開発して、お客様に今のクルマの状態が瞬時に正しくわかるようにしたわけです。さらに、ドライバーに引継ぎ要求の警告を出しても反応がない場合は、クルマとしてリスク最小化の対応を行います。警報音や警告灯の点滅周期を変更して強調したり、シートベルトを引く体感警報で触覚に訴えることで、ドライバーにより強く引継ぎを要求するようにしました。それでも反応がない場合、ハザードランプを点滅させ、ホーンを鳴らすことで周辺へ注意喚起しつつ、減速してクルマを停止させる支援を行うこととしました。
基準に準ずるだけではなく、あるべき姿を実現するのがHonda
冗長制御も徹底して行ったと伺いました。
開発当初は世の中に自動運転のざっくりとしたレベルの定義があるだけで、レベル3に求められる性能とか機能について詳細な規定がありませんでした。したがって、我々はゼロから設計しないといけなかったのですが、設計をはじめたときに「これくらいで良いよね」と開発者都合で妥協をするのはやめようと決めました。「お客様はそんな設計にして欲しくないだろう」ということを念頭に置き、緻密かつ網羅的に設計していきました。
その一つが冗長設計です。車外を検知するセンサーはもとより、「曲がる」と「止まる」に対する制御デバイスも二重系をとっていて、さらにそれらを動かす電源まで二重系としています。したがって、我々のシステムは、いずれかが壊れた後も一定の制御が続きます。先ほど九鬼が説明した、引継ぎ要求にドライバーが反応しない場合、減速して停車させる緊急時停車支援機能の制御までも片側系統が故障した場合でもきちんと実行できるように設計したことが一番の特徴といえます。基準ではそこまで求めていないのですが、あるべき姿を追求するというのがHondaの考えなんです。
開発と並行して整備された法律にも対応できたわけですね。
我々の開発と並行して自動運転の法律が固まっていきましたが、開発当初から妥協をせずに設計していましたから、その後整備された法律にも適合することができて、今回LEGENDに搭載してお客様に提供できるようになりました。
それはあくまでもお客様の立場に立ち、どこまでやれば良いかを考えた結果です。例えば、レベル3でドライバーへ引継ぎ要求を出したあとにどうするかという基準は、当時世界的に見ても存在しませんでした。しかし我々は、「引継ぎ要求を出したあとに、“そのあとは知りません”というシステムはあってはならない」という考えのもと、ドライバーへ引継ぎ要求を出したあとも一定の制御を継続させる設計にしました。その後、世の中で同じ方向性の議論が進み基準がつくられました。自分たちの考えは正しかったんだなと思いましたね。
ドライバーへ引継ぎ要求を出したあとも制御を続ける?
引継ぎ要求を行ったあとに何も制御をしなかったら、ドライバーが運転するまで誰も制御していない状態になるので、車線逸脱するかもしれないし、前走車の接近に対して減速せずに追突するかもしれません。それではダメなので、車線維持支援もするし、衝突を回避するためのブレーキもかける制御を続ける必要があると考えそれを実践したわけです。引継ぎ要求をすることでレベル3を終了してドライバーが運転する状態に持っていっているんですけど、その裏で一定の制御が続いているという設計思想です。
さらに言えば、安全に制御するだけでいいというわけではない
さらに言いますと、安全を確保するだけでなく乗り味も追求しました。例えば割り込み車への対応でクルマを減速させる場合、例えば乗員の上体がガクっとなる強めのブレーキがかかるとすると、トラフィックジャムパイロット(渋滞運転機能)の魅力の一つである車載ディスプレイで動画を見続けることができなくなります。ですので、割り込み車の動きに合わせてスムーズなブレーキを追求しました。そういう細かいところを一つひとつ実現したところも難しかったですね。
安全運転支援技術であったとしても、当然良いクルマでなければいけないという前提を持ちました。我々は動く箱をつくっているわけではないので、安全運転支援技術を備えているのと同時に、クルマとしての商品力が高いものでなければいけません。制御をやれば良いというものではなく、安全性も考えて制御しながら、お客様の使い勝手も考えるべきです。両面が成り立つように商品をつくっていくことを心がけました。
 トラフィックジャムパイロット(渋滞運転機能)作動時に動画視聴しているドライバー
トラフィックジャムパイロット(渋滞運転機能)作動時に動画視聴しているドライバー
Hondaって勢いに任せるように見えて、実は馬鹿正直なんです。真面目にじっくり検討すると当然ながら時間も手間もかかるわけですが、「それでお客様は満足するのか?」ということが問われる会社なので、「これぐらいでいいじゃないですか」とは決してならないんです。お客様のために徹底してこだわる、それがHondaの開発思想です。
この記事は2021年3月4日に公開されたものの再掲となります。





我々Hondaは、すべての人に生活の可能性が拡がる自由な移動をお楽しみいただくために、「Safety for Everyone」のスローガンのもと、交通事故ゼロ社会の実現を目指しています。その一環として、誰もが自由に移動できるモビリティーを提供するという目標を掲げ、運転の負荷を低減すべく安全運転支援技術の進化に力を注いでいます。そうした想いのもと、Honda SENSINGを進化させ、今回Honda SENSING Elite(ホンダセンシングエリート)という名称でLEGENDに搭載しました。ハンズオフ機能付車線変更支援機能などを追加しましたが、トラフィックジャムパイロット(渋滞運転機能)もHonda SENSING Eliteの機能の一つです。