

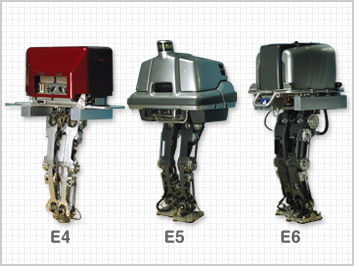
E4پEE5پEE6پi1991-1993پj
2‘«•àچs‚جٹî–{‹@”\‚ھ‚آ‚¢‚ةٹ®گ¬پB
پuگأ•àچsپv‚»‚µ‚ؤپu“®•àچsپv‚ًŒ¤‹†‚µ‚½Œم‚جژں‚ج‰غ‘è‚حپA•à‚ژpگ¨‚ھ‚و‚èˆہ’肵‚ؤ‚¢‚é‚©‚إ‚µ‚½پBˆہ’肵‚½ژpگ¨‚إ•àچs‚·‚邱‚ئ‚إپA‰ں‚³‚ꂽ‚èپAڈ°‚ج‚إ‚±‚ع‚±‚ھ‚ ‚ء‚ؤ‚à‚½‚¨‚ê‚ب‚©‚ء‚½‚è‚·‚邱‚ئ‚ھ‚إ‚«پAٹK’i‚âژخ–ت‚إ‚àژpگ¨‚ًژ©•ھ‚إ•غ‚؟پA•à‚¯‚é‚و‚¤‚ةŒ¤‹†‚µ‚ـ‚µ‚½پB‚±‚¤‚µ‚ؤ‚آ‚¢‚ةگlٹش‚ئ“¯‚¶2‘«•àچs‚جٹî–{‚ج‹@”\‚ھ‚آ‚¢‚ةٹ®گ¬‚µ‚ـ‚µ‚½پB
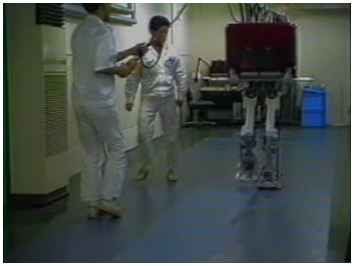
E4‚ج“®‚«
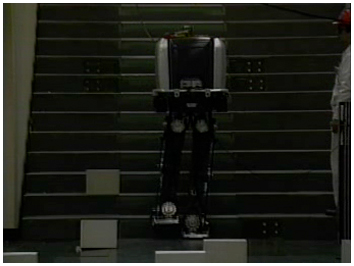
E6‚ج“®‚«