

E0Åi1986Åj
2ñ{ë´Ç≈ïýÇ≠Ç…ÇÕÅHÇÐÇ∏2ë´Ç≈ïýÇ©ÇπǃÇðÇÈÅB
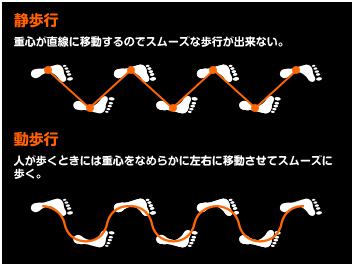
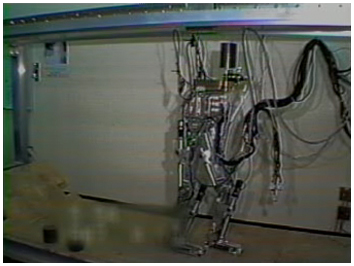
2ñ{ë´Ç≈ïýÇ≠ǵÇ≠ÇðÇÃå§ãÜÇ≈ǬÇ≠Ç¡ÇΩç≈èâÇÃÉçÉ{ÉbÉgÅuE0ÅvÅBÇÐÇ∏ÅuïýÇ≠DZÇ∆ÅvÇå§ãÜǵ2ñ{ë´Ç≈ïýÇ≠ÇÃÇ…ÇÕÅAǢǬÇýëÃÇÃèdêSÇ™ë´ÇÃóÝÅiǧÇÁÅjÇÃîÕàÕÅiÇÕÇÒÇ¢ÅjÇ…ì¸ÇÈÇÊǧDžïýÇ≠Åuê√ïýçsÅvÇ∆ÅAëÃÇÃìÆÇ≠ê®Ç¢ÇóòópǵǃÉXÉÄÅ[ÉYÇ…ïýÇ≠ÇΩÇþÇ…èdêSÇï™éUÅiÇ‘ÇÒÇ≥ÇÒÅjÇ≥ÇπÇΩÅuìÆïýçsÅvÇ™ÇÝÇÈDZÇ∆Ç™ï™Ç©ÇËÇÐǵÇΩÅBE0ÇÕÇÐÇ∏DZÇÃÅuê√ïýçsÅvÇ…ÇÊÇÈà⁄ìÆÇ≈ë´ÇDZǧÇ≤Ç…èoǵǃïýÇ≠DZÇ∆Ç…ê¨å˜ÇµÇÐǵÇΩÅBDZÇÃDZÇÎÅuê√ïýçsÅvÇ≈ïýǢǃǢÇΩÇΩÇþÅAÇ»ÇÒÇ∆1ïýÇ…5ïbÇýǩǩǡǃǢÇÐǵÇΩÅB

E0ÇÃìÆÇ´