技術の概要
設定した車速内で
クルマが自動的に
加減速を支援。
前走車との車間距離を
維持しながら
追従走行を支援。
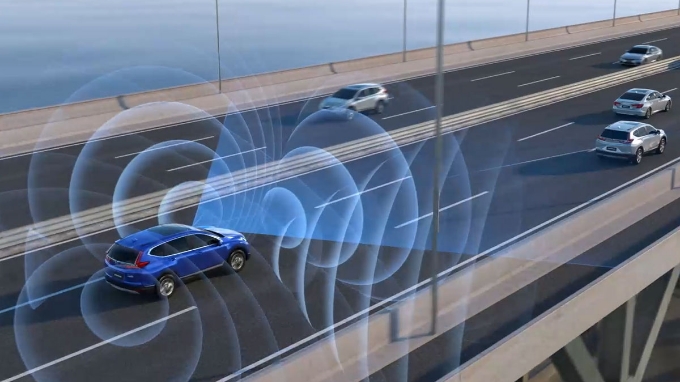
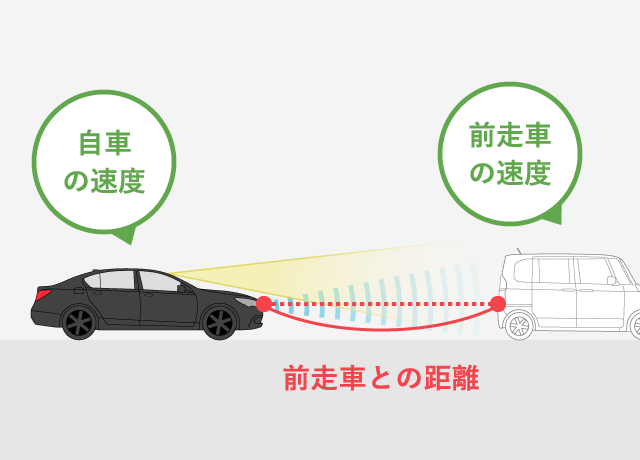
アダプティブクルーズコントロール(ACC)は高速道路などの長距離移動の時に、あらかじめ設定した車速内でクルマが自動的に加減速の支援を行います。前走車との車間距離を維持しながら追従走行を支援することで、ドライバーの運転負荷を軽減する機能です。
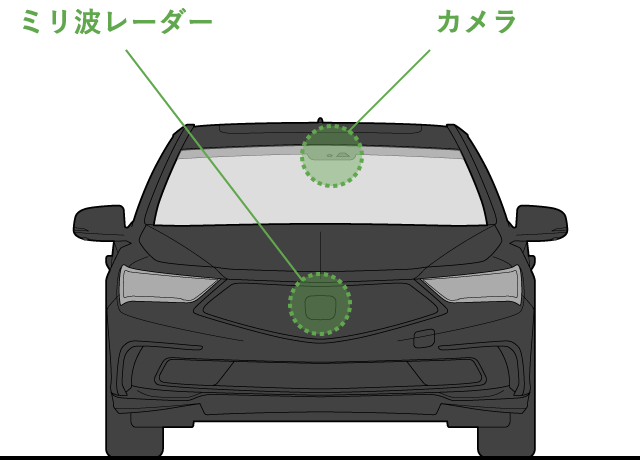
ステアリングのスイッチを操作することで設定車速を変えたり、前走車との車間距離を4段階に替えることが可能です。前走車の有無や前走車との車間距離と速度差はカメラとミリ波レーダーが測定します。
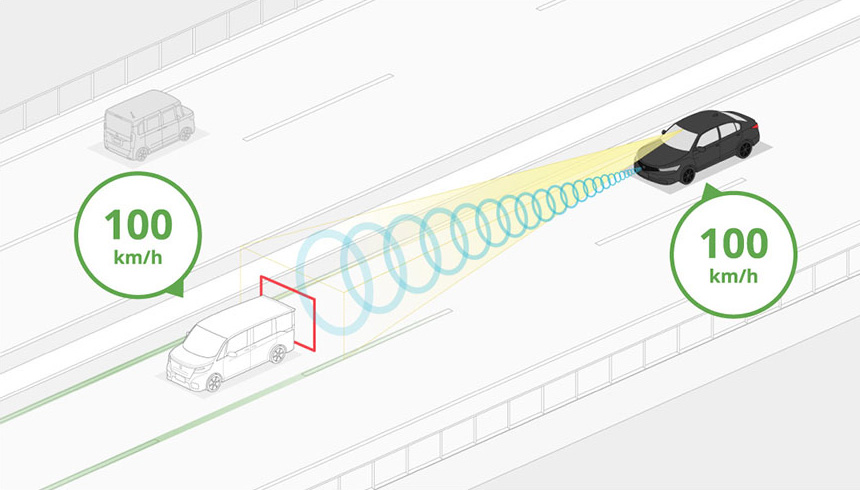
渋滞追従機能付ACCは、前走車が停止したら自車も自動的に停止できるよう支援。前走車が発進した場合は、ドライバーによるステアリングのスイッチ操作、またはアクセル操作によって追従走行の支援を再開します。高速道路などの渋滞で頻繁に停止と発進を繰り返すときに役立つ機能です。
※ACCは、約30km/h以上(渋滞追従機能付は約0km/h以上)で作動します。急なカーブや加速・減速の繰り返しが少ない、高速道路や自動車専用道路などを運転するときに使用してください。
技術のはたらき
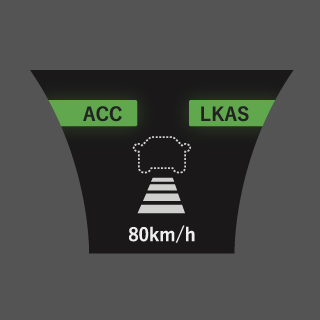
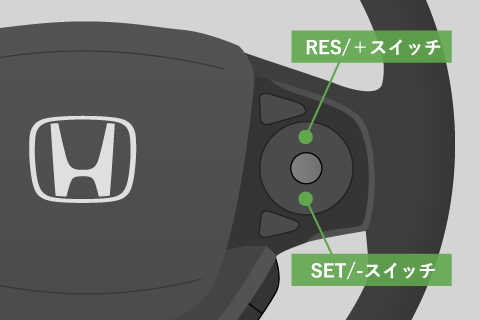
ACCは、ステアリングにある「MAIN」スイッチを押した後、「SET/-」スイッチを押すと作動する機能です。
※お客様所有の車両と実際のスイッチの配置やメーター内の表示は異なる場合があります。実際の操作やメーター内の表示は取扱説明書をご確認ください。
-
「MAIN 」スイッチ

メーター内の表示
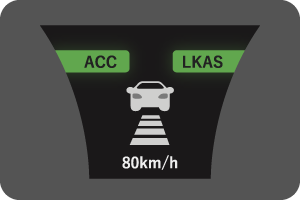
「SET/- 」 スイッチ

メーター内の表示
- 通常走行の場合
- 前走車が車線から
外れた場合 - 割り込みがあった場合
- 渋滞追従機能付ACC
搭載車の場合
STEP1
前走車がカメラとミリ波レーダーの測定範囲に入ると、その前走車との距離や速度差を測定
前走車を検知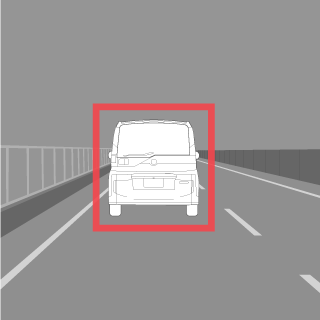
メーター内の表示
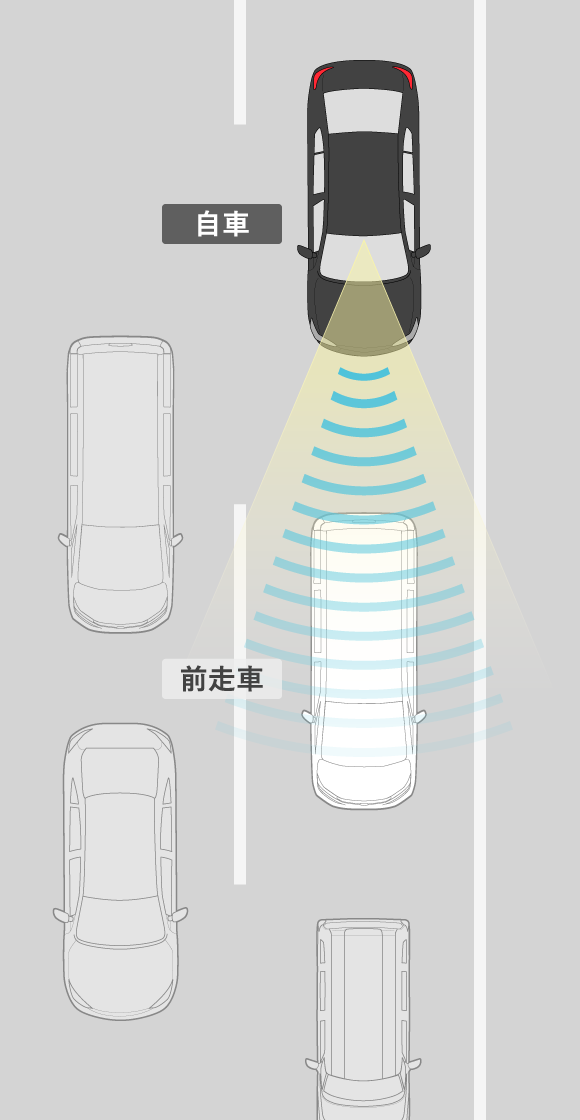
STEP2
前走車と車間距離を保ちながら追従走行を支援
STEP1
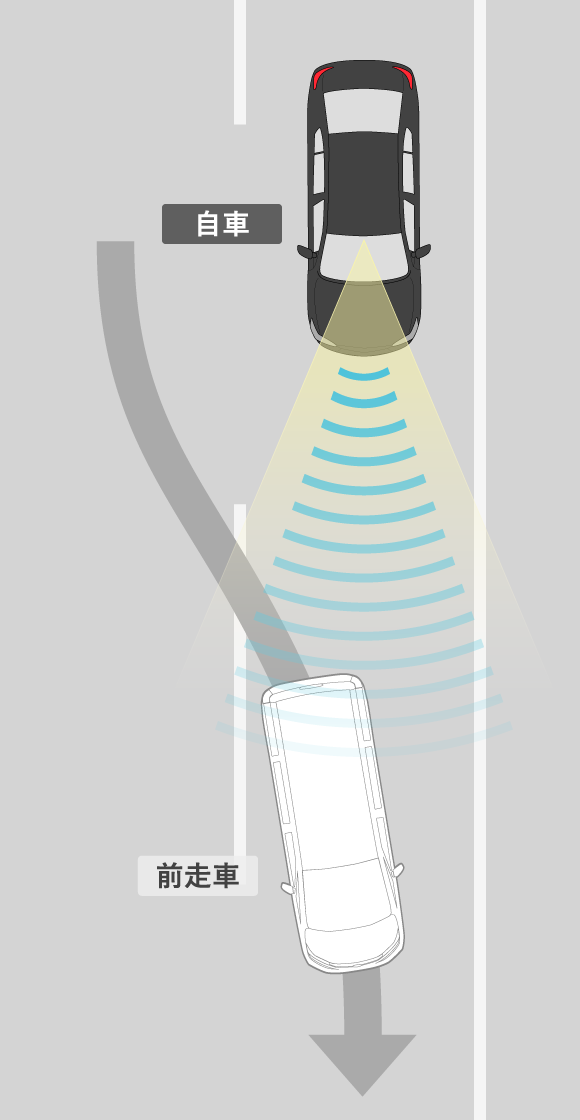
ACCで追従走行中、カメラとミリ波レーダーが前走車のいなくなったことを検知
前走車がいなくなったことを検知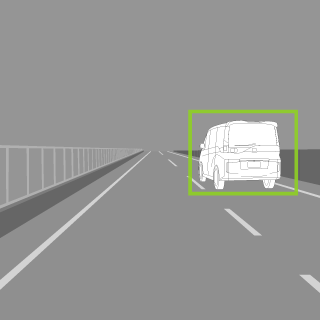
メーター内の表示
STEP2
設定速度まで自動的に加速を支援し定速走行
STEP1
カメラとミリ波レーダーが新たな前走車を検知し、新たな前走車との距離や速度の差を測定
新たな前走車を検知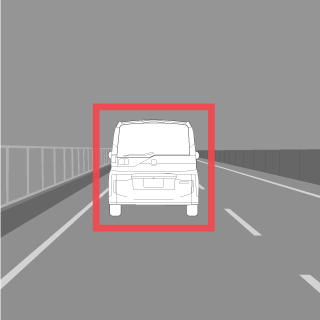
メーター内の表示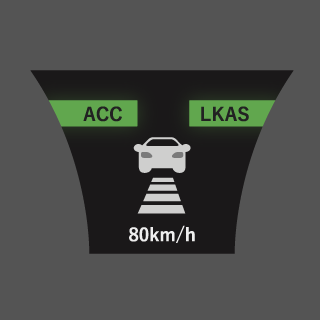
STEP2
新たな前走車との車間距離を保ちながら追従走行を支援
STEP1
カメラとミリ波レーダーが前走車の停止を検知すると、自車も追従し停止できるよう支援
前走車を検知 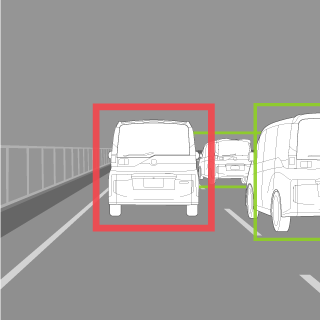
メーター内の表示
STEP2
前走車が動き出した場合、「RES/+」「SET/−」スイッチを押すまたはアクセルを踏むことにより追従走行の支援を再開
 スイッチ操作または
スイッチ操作または
アクセルペダルを踏む
- 通常走行の場合
- 前走車が車線から
外れた場合 - 割り込みがあった場合
- 渋滞追従機能付ACC
搭載車の場合
技術のしくみ
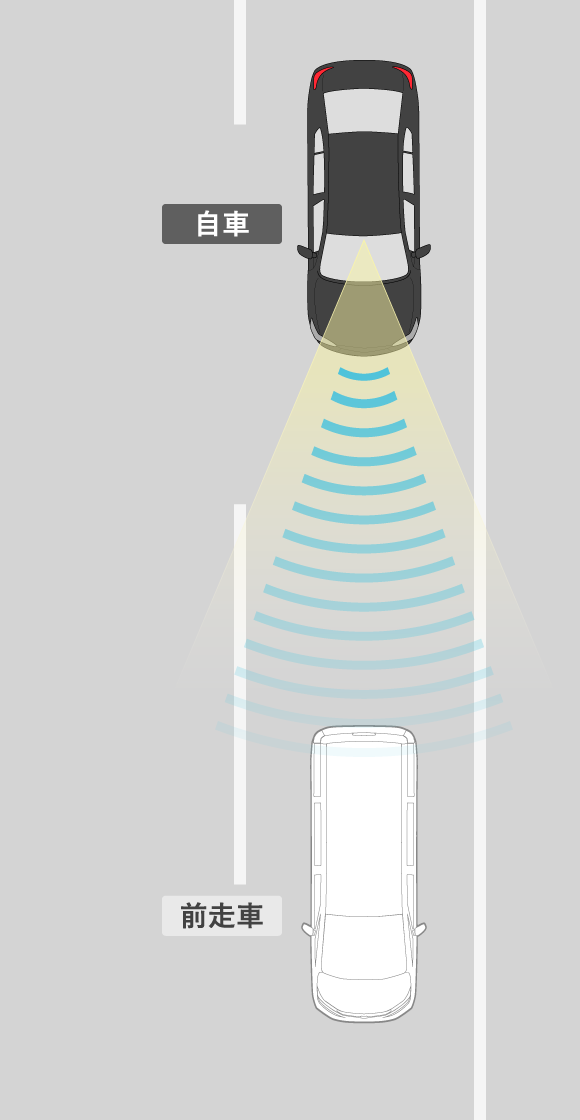
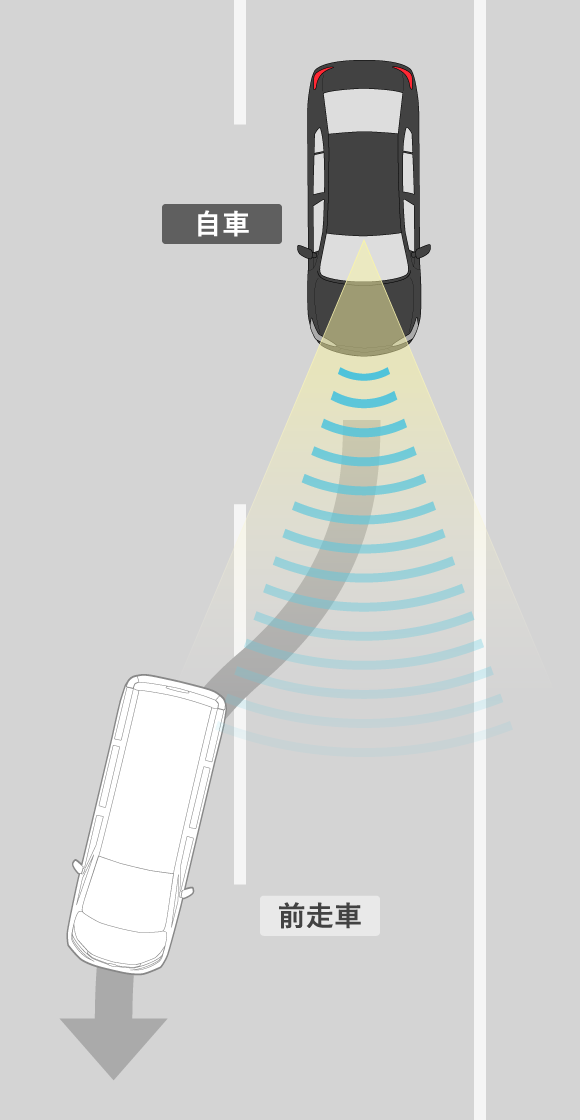
追従を支援するしくみ
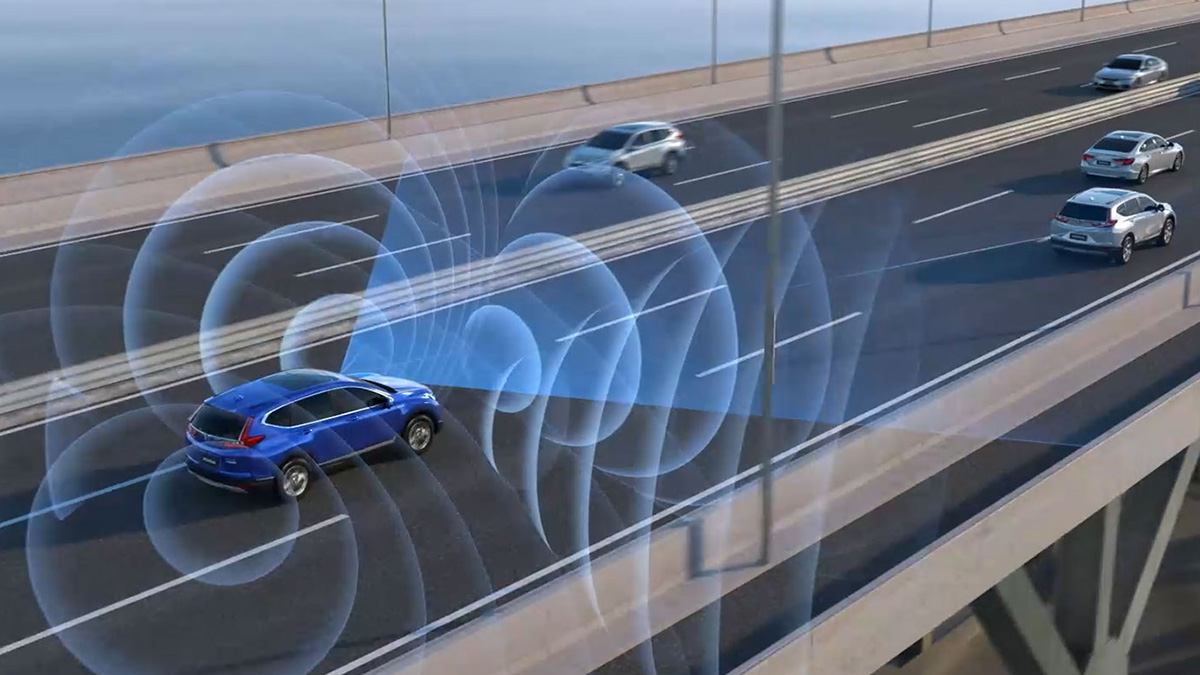
前走車に追従走行している場合は、カメラとミリ波レーダーによって検知した前走車までの距離と速度差から、自動的に速度を制御し、車間距離を保ちながら走行を支援します。前走車がブレーキを掛けたり、割り込み車があったりした場合は、目標車間距離を維持するため、速度制御を支援する場合もあります。
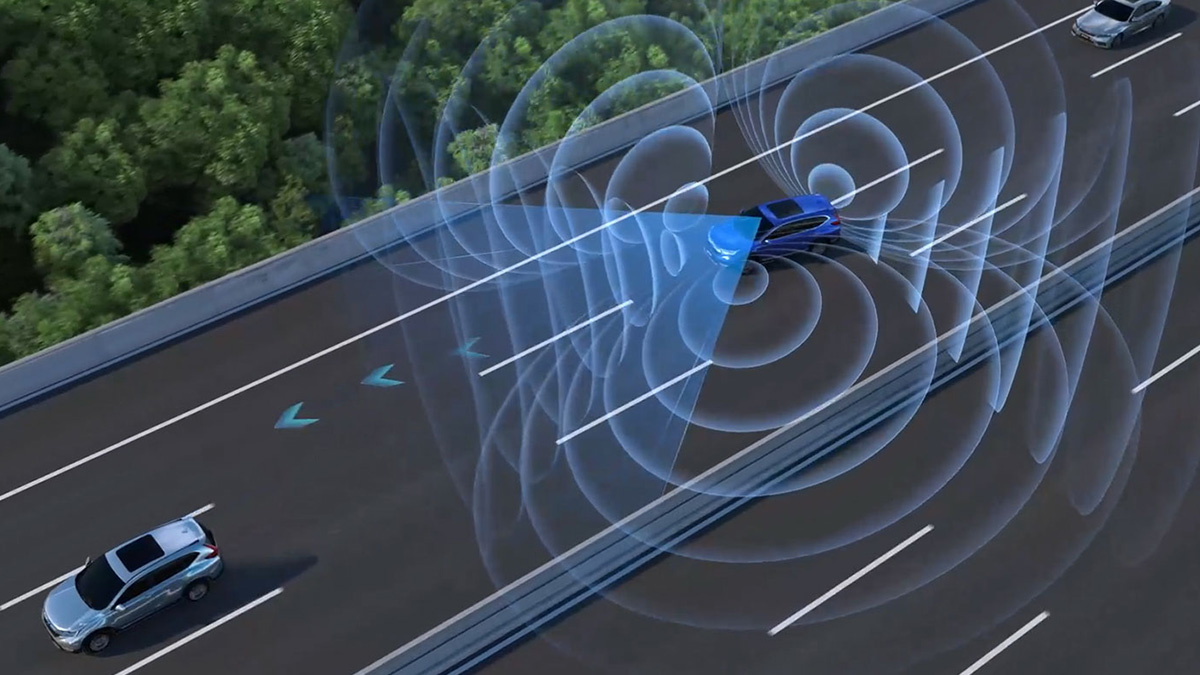
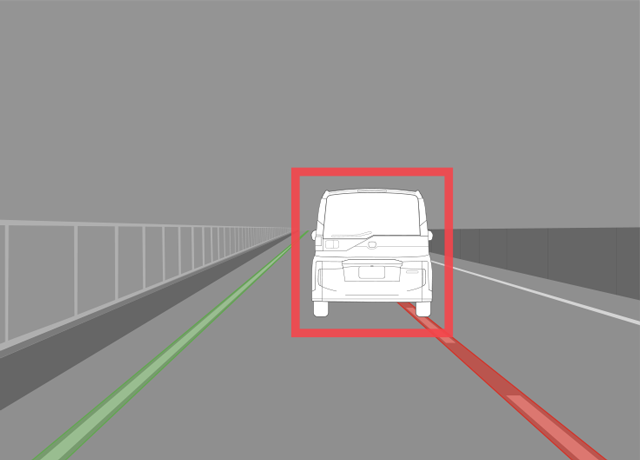
カメラで
見ているのは?
カメラによって車線の検知が可能になったことにより、前走車の位置との検知精度が高まり、追従すべき前走車の捕捉や切り替えが素早く行えるようになったのです。
【動画】機能紹介
ドライバーの運転支援機能のため、各機能の能力(認識能力・制御能力)には限界があります。各機能の能力を過信せず、つねに周囲の状況に気をつけ、安全運転をお願いします。車両をご使用になる前に必ず取扱説明書をお読みください。各システムは、いずれも道路状況、天候状況、車両状態等によっては、作動しない場合や十分に性能を発揮できない場合があります。
一部地域で搭載が無い場合があります。
車種や発売時期によって本ページの説明とお客様所有の車両の機能が異なる場合があります。 実際の機能は取扱説明書をご確認ください。