移動手段の多次元化と活動可能性の拡張
人に寄り添い、人の役に立つ
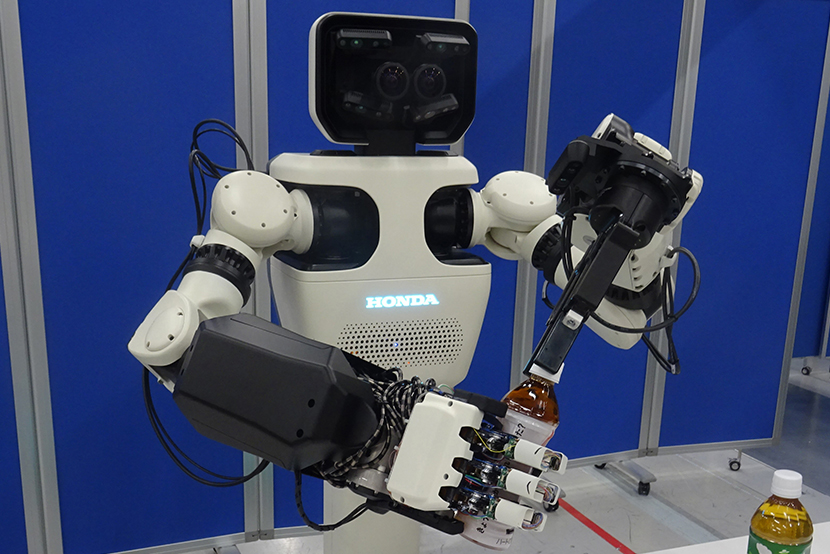
“Hondaアバターロボット”
Hondaは、「技術は人のために」という創業以来の企業精神のもと、ロボットにおいても、人に寄り添い、人の役に立ち、生活の質を向上させ、人の可能性を拡大することをめざして研究開発を続けています。人とロボットが物理的に同じ空間に存在するだけでなく、心理的にも共存できること。人を中心として機能を考えること。こうした理念に基づき、これまでにASIMOやUNI-CUB、歩行アシストなど数々の製品を開発してきました。
これからは個別の機能を持つさまざまなロボットとして研究開発することで、より早く具現化して世の中に価値を提供していきます。その取り組みの一つとして、Hondaアバターロボットは「時間価値の最大化」と「身体機能の拡張」をスコープとして定め、研究開発をしています。
ASIMOの開発では、人とすれ違ったり、ぶつかっても倒れないなどの「人と同じ空間で移動する」機能、「手を使って作業する」機能、人の発話内容を理解したり、人の意図をくみ取って動きを制御するなどの「人とのインタラクション」機能を実現してきました。Hondaアバターロボットは、ハードウェアである多指ハンドに加えて、そのハンドを意のままに操作するための制御やAIといったソフトウェアも含めたさまざまな技術の搭載を目指しています。
今回は、多指ハンドの遠隔操縦だけではなかなかうまくいかない作業に対して、操作者の意図を推定して手の動きを補正する「AIサポート遠隔操縦技術」と人とロボットの体の違いを吸収して、意のままの操作の実現を目指した「姿勢マッピング技術」を紹介します。
AI Supportシステム
ヒト×ロボットがシームレスに繋がることによって両者のスキルを最大化するフレームワーク
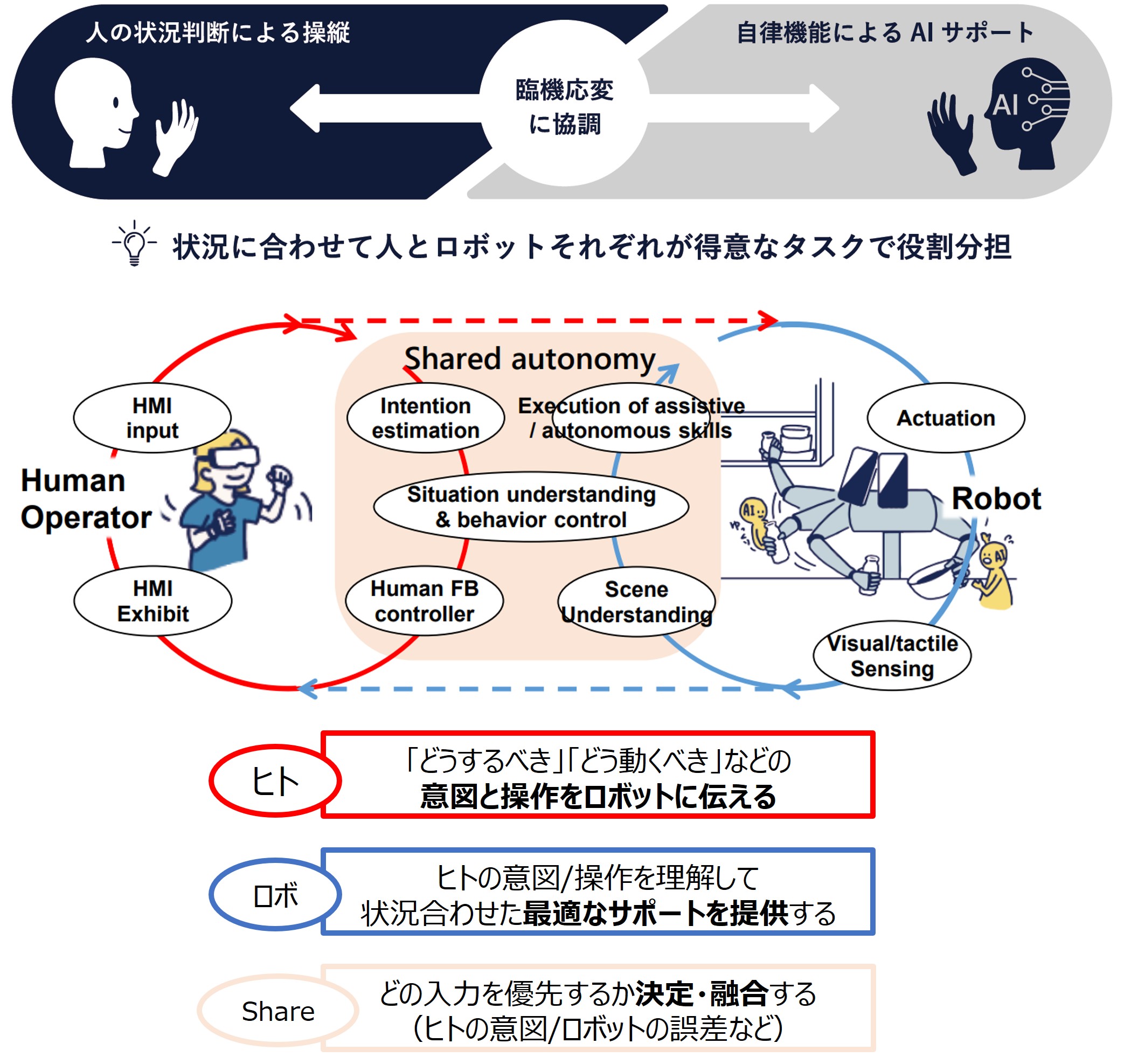
操作者の作業の質を遠隔操縦でも損なわず、違和感のない操作を実現するためには、ヒトとロボットが協力しながら作業をする必要があります。この課題に対して遠隔操作の難しい部分をAIでサポートして、スムーズな作業を実現する「AIサポート遠隔操縦」を研究開発しています。
特徴として、どのように行動をするべきかは人が状況判断を行い、細かい動作は自律機能によりAIがサポートします。このように人とロボットが臨機応変に協調することで、スムーズに作業を行うことができます。
このAIサポート遠隔操縦を実現するためには、ヒトがやろうとしている作業の「意図の推定」、ヒトの意図を理解した上で「状況に合わせたロボットの自律的な補正」、ヒトの操作とロボットの補正量の「優先度付け・融合」それぞれの機能が重要です。
ヒトスキル・ロボットスキルを混ぜ合わせることによる作業の達成
Hondaの強み
Hondaのロボットは繊細な操作を可能にする多指ハンドを搭載しています。これにより、操作者は道具を直観的に扱うことができ、グリッパでは難しい多様な操作を実現しています。しかし、多指ハンドの操作は操作者にとって困難なことが多く、把持動作だけでも「対象物をどのような手の形で持つかを計画」「手を伸ばして把持」「しっかり持てているかを確認して修正動作をする」といった複数のプロセスが必要です。遠隔操縦では、カメラ映像から距離感がつかみにくく、触った状態が操作者に伝わらないため、感覚とのずれが生じます。
そこでHondaは、状況に応じた多指ハンドの動作を組み合わせたスキルセットを作成し、操作者の意図や状況に応じて呼び出すことで操作者の「やりたい」を実現しています。また、完全自動化が難しい作業においても、ヒトの判断やヒトの操作といったヒトスキルを自由に組み合わせることができるShared Autonomyのシステムによって、道具の把持・持ち替え・挿入・操作の一連作業を実現しています。
動作推定×自動化スキル
Hondaは多指ハンドにおける操作において、操作者の動作を元に作業を推定し、必要なサポートを適宜呼び出すことで精密な操作を実現しています。
道具の持ち替え:操作者の動作を基に操作者の操作を推定しシステム側で道具の操作に最適な把持力を計算することで精密な操作を実現しています。安定的な把持のみをサポートするため操作者は自由な方向に道具を操作することができます。
道具の操作:把持力の調整だけでなく状況に応じて操作者が操作していない指を自動で操作に加えることによって複雑な操作も可能にしています。これによって操作者は道具操作のみに集中でき、細かい部分は自動化スキルが変わりにやってくれます。
このように、操作者の動作に応じてロボットの持つスキルを適切なタイミング・適切なバランスで組み合わせることで、所望の動作を実現します。
道具の持ち替え
×4
道具の操作
×4
制御方法のスイッチングにより意のままに把持姿勢を使いこなす
意のまま姿勢マッピング
多指ハンドの遠隔操作を通じてヒトの物体・道具操作能力を発揮するため、Hondaはヒトの把持姿勢にも注目をしています。ヒトは約30種類の把持姿勢を使い分けていることが知られており、Hondaの多指ハンドには、日常動作の約80%を占める14個の把持姿勢を再現できる強みがあります。しかしながら、この強みを遠隔操作において最大限引き出すためには、ヒトの手と多指ハンドとの構造や自由度の違いを考慮したマッピング技術も求められます。
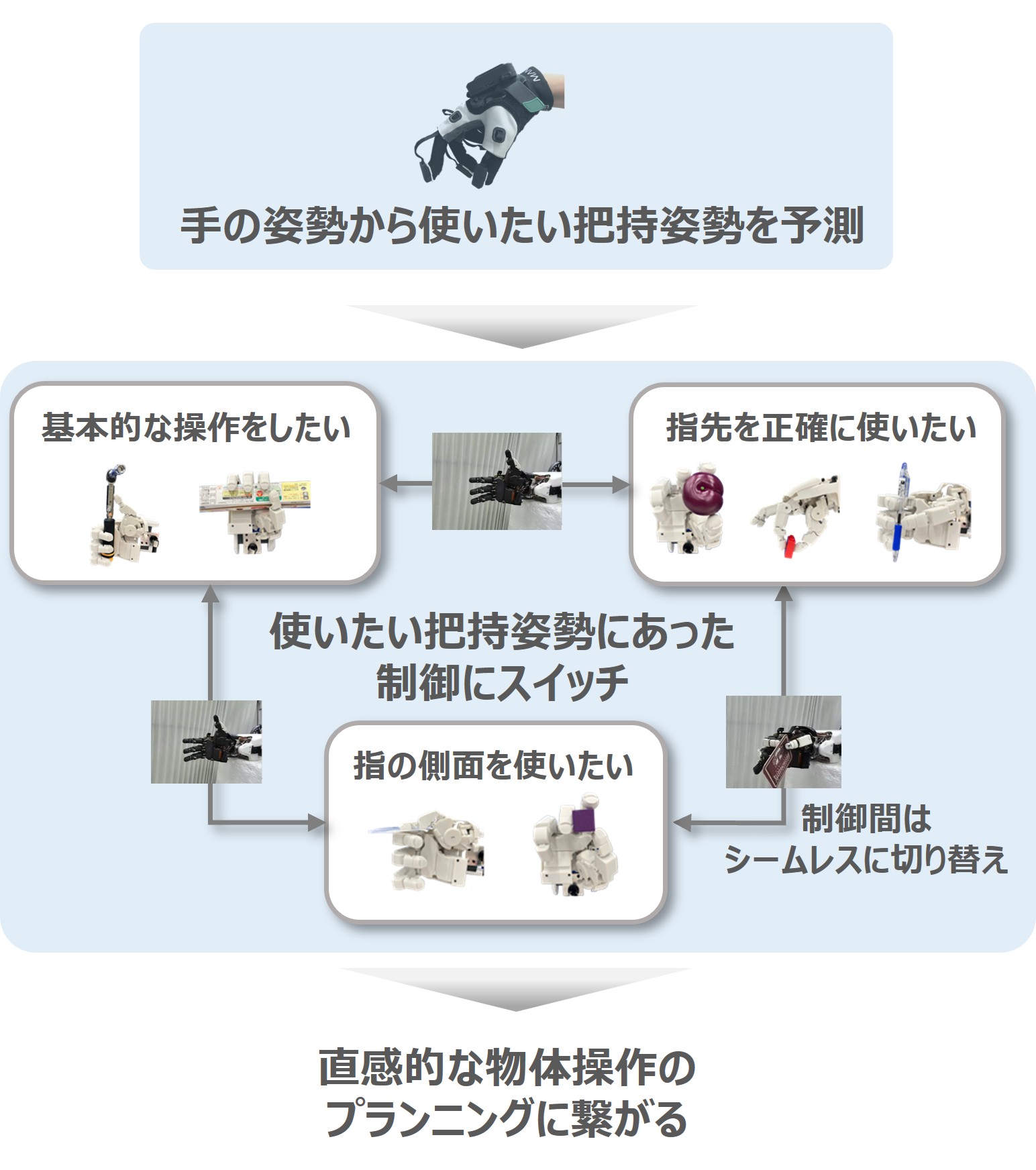
モノを大きく掴みたい場合には、関節角度をもとに制御すると良い、モノを正確に掴みたい場合には、指先距離をベースに制御すると良いなど、各把持姿勢に適した制御方法があることが知られています。そこでHondaは、操作者の手の姿勢から使いたい把持姿勢を予測し、その姿勢にあった制御方法にスイッチする枠組みを提案することで、意のまま姿勢マッピングを実現しました。
直感的な物体操作のプランニングと多指ハンドの器用さの発揮に貢献
Hondaの強み
多指ハンドの強みとして、ヒトの手に構造が近いことから、操作をプランニングしやすいという点が挙げられます。提案したHondaのマッピング技術は、左の動画のように、遠隔操作により、日常動作の約80%を占める14個の把持姿勢を意のままに扱うことを可能にしました。これは、その後の直感的な物体操作のプランニングに繋がると考えています。
また、各把持姿勢に適した制御方法を選択することで、副次的に多指ハンドの器用さを最大限活用することも可能にしました。使いたい把持姿勢に合わせて、多指ハンドの自由度を使い切ることが可能になっています。今後、把持力などの考慮と組み合わせていくことで、意のままな物体操作に繋がっていくと考えています。
手の特徴量に基づく制御のスイッチ

重みを手の特徴量から更新することで、制御のスイッチを実現
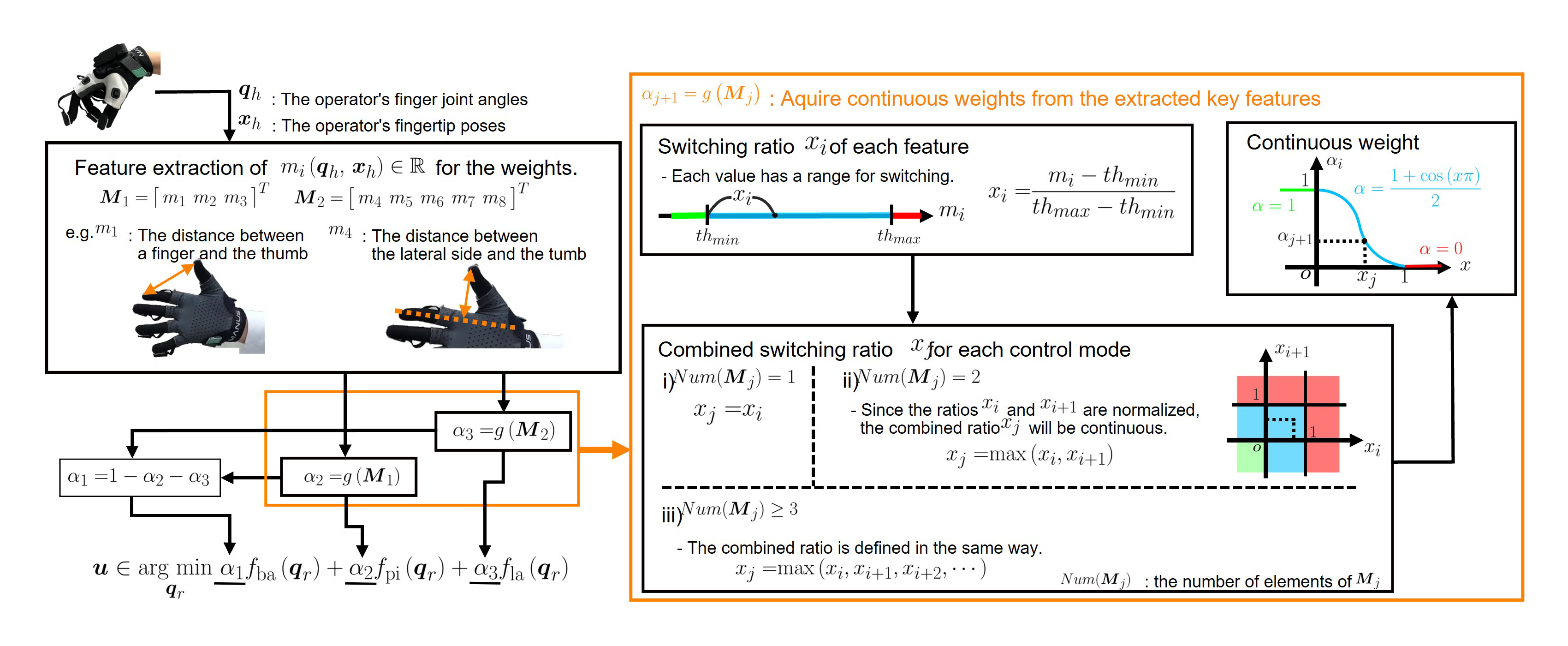
入力デバイスを用いることで、操作者の指先姿勢や関節角度を取得することができます。さらに、これらの情報から指間距離や手の広がりなど、より高次の情報を抜き出すことができ、そこから操作者の使いたい把持姿勢を予測できるのではないかと考えました。また、制御間のスイッチングは、各制御に対応する重みを変更することで実現されます。私たちの方法では、手の姿勢から抽出した特徴量をもとに、これらの重みを滑らかに変更することで、使いたい把持姿勢に適した制御へのスイッチングを可能にします。
操作者の手の姿勢から使いたい把持姿勢にあった制御方法を予測するためには、いくつかの特徴量を見て、複合的にどの方法を取りたいかを判断する必要があります。これを実現するため、以下のようなフレームワークを提案しました。各特徴量がどれくらい使いたい制御に近いかを複合的にみることでスイッチングを可能にします。
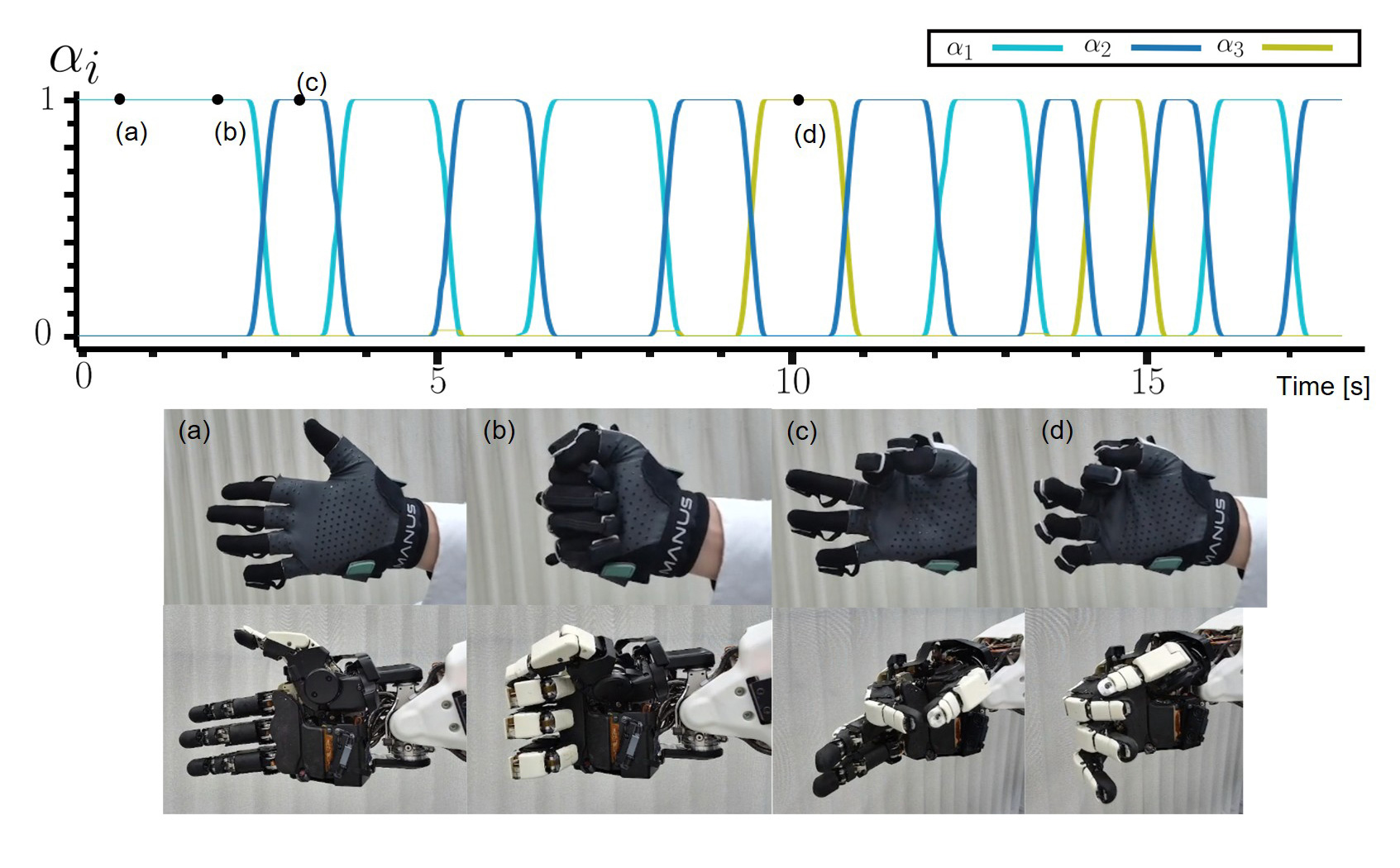
以下は手の姿勢に応じたスイッチングを検証した結果になります。ヒトの手の姿勢に応じて、シームレスに各制御方法にスイッチ出来ています。
将来展望
Hondaが開発を進めるアバターロボットは、人の動作を高精度で再現する多指ハンドと、今回紹介した「AIサポート技術」「姿勢マッピング技術」により遠隔地からの直感的な操作を可能にしています。操縦者はまるでその場にいるかのような感覚でロボットを動かすことができ、危険な現場や熟練の技術が必要な作業など、さまざまな場面での応用が期待されています。
Hondaはこの技術を「人の能力を拡張するもの」と位置づけており、単なる労働代替ではなく、人が行けない場所やできないことを可能にする手段として、アバターロボットの社会実装を目指しています。2030年までの実用化を視野に入れ、外部の企業・研究機関とのオープンイノベーションを積極的に進めています。
このような技術の発展は、身体的制約や地理的制約から人々を解放し、誰もが場所を問わずにスキルや能力を発揮できる社会の実現につながります。たとえば、地方や海外にいる熟練技能者が都市部の現場を遠隔でサポートしたり、新たな就労機会を得ることも可能になります。Hondaのアバターロボットは、人とロボットが共存・協働する新たな社会モデルの中核を担い、未来のライフスタイルや働き方そのものを変革していく力を秘めていると考えています。