Innovative Research
Excellence
Research on Innovative and Unique Technologies
Aiming for the realization of a “society with zero environmental impact” and a “society with zero traffic accident fatalities,” the Innovative Research Excellence center J6:J16has been striving to research the technologies as follows:
- recycling technologies and next-generation electrification technologies to reduce environmental impact,
- technologies to understand humans and expand their ability so that every person can obtain his or her peace of mind,
- secure and safe technologies required for all traffic participants including motorcycles and automobiles to coexist, and
- innovative production technologies looking into the future.

Additive Manufacturing (AM)
AM is increasingly expected to enable higher‑performance parts and provide more flexible responses to global customer needs. Applying AM to Honda’s current and future businesses requires researching and selecting AM technologies that meet components’ functional and quality requirements as well as business needs. Therefore, engineers in design, production engineering, and materials are collaborating to conduct research on AM‑optimized part designs and to advance manufacturing processes that enhance component performance.


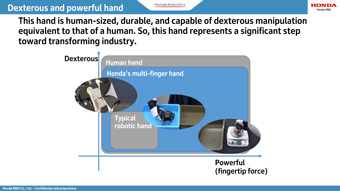
Multi-fingered Hand
Human hands not only can grasp various objects, but also dexterously handle tools and apply strong forces with their fingertips to assemble or disassemble parts. By realizing such a robotic hand at a human-equivalent size, we aim to enable a single hand to perform the diverse tasks currently done by humans. Historically, robotic hands, when scaled down to human-like sizes, typically possess durability levels far below what could be considered practical. This hand is a multi-fingered design that simultaneously achieves dexterity, strength, and durability, with a cyclic endurance exceeding 450,000 cycles, including load patterns at maximum capacity.

Avatar Robot
A user can now “experience things” and “perform tasks” in places where they are not physically present through a second self. We think of our Avatar Robot as a means of mobility that goes beyond the second and third dimensions to a 4th dimension, transcending space and time and expanding your capabilities beyond the bounds of time, place, or ability – continuing to expand beyond the sphere of human activity and space and time itself. Aiming to create robots that can work in environments where people live, we are striving to develop robotic hands equipped with the same sensitivity and strength as human hands, as well as remote AI support technology that corrects the discrepancies between human and robot vision and touch, so that users may operate them freely.


Hybrid eVTOL
We have been researching various elemental technologies and working on conceptual and basic designs of the aircraft, type certification, and studies toward building an ecosystem for the practical application of the electric Vertical Takeoff and Landing aircraft (eVTOL).
Leveraging its expertise accumulated through HondaJet—such as aerodynamics, NV (noise and vibration), structure, weight reduction, and certification—along with the rapid development techniques refined in the world of racing and the M/M (man-maximum, machine-minimum) philosophy cultivated through automobile development, we are creating mobility that is uniquely Honda.
In 2025, we exhibited at the Dubai Airshow, showcasing a cabin mock-up and subscale model to share the current status of development and our future direction.




Sustainable Rocket
With a view to expanding the range of human activities and enriching the lives of people on the ground through the use of space, we are conducting research and development on our original reusable small rocket, focusing on its affinity with and applicability to Honda’s core technology, in order to make space transportation more accessible, which is a bottleneck for human activities.





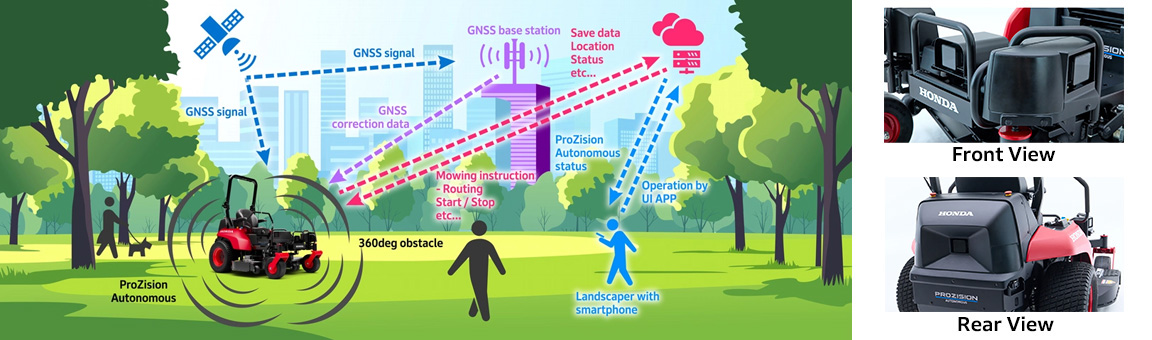
Autonomous Work Intelligence Technology for Off-Road Environments
We are advancing research and development of autonomous work intelligence technologies that enable high work efficiency even in complex and diverse off-road environments where no maps exist. By learning the decision-making patterns and operational behaviors of skilled operators, AI enables work machines to understand their surroundings and autonomously select optimal actions. To achieve this, we integrate three core technologies: environmental perception that accurately identifies terrain and surface conditions; autonomous path planning that generates efficient routes based on work objectives and ground characteristics; and integrated vehicle control that ensures both stability and precision on uneven terrain. Through these efforts, we aim to realize autonomous work systems that can intelligently collaborate with people in real-world environments.



Advanced Autonomous Vessel Control Technology
At sea, natural elements such as wind, waves, and currents affect vessels, frequently requiring navigation in uncertain conditions that demand advanced skills. We are advancing research and development of autonomous navigation technology that recognizes these environments in real time, maintaining a balance between safety and comfort. We are developing environmental recognition technology that comprehensively grasps wind, waves, currents, and the movements of other vessels; hull control technology that precisely manages the vessel's attitude and propulsion; and a ship handling support interface that conveys human operational intent to the control system. This enables next-generation waterborne mobility that delivers safer and more comfortable navigation even in uncertain environments, creating the joy of moving freely on the water.



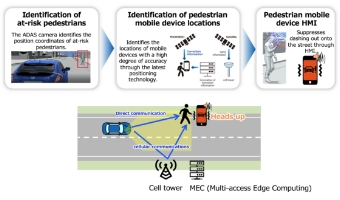
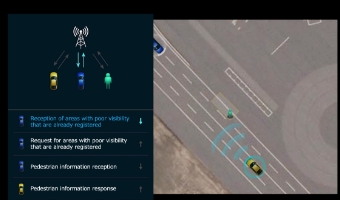
Linking V2P and ADAS Technologies
We have been researching the technology to reduce accidents by utilizing AI, 5G, and cellular V2X communication, aiming for the realization of a society where pedestrians and vehicles can move safely and securely. The system enables the AI of the cameras on board to detect a pedestrian entering a roadway, and to alert him or her to the approach of a vehicle by communication with the pedestrian’s smartphone. The system also enables each other to pay attention by identifying not only the areas that cannot be seen very well, due to the obstacles such as parked automobiles along roadways, but the presence of pedestrians in the area with a smartphone or the camera of the ongoing vehicle. In the future, various risks in the streets will be compiled into the server, and the technology will be expanded to the cooperative safety system that can encourage traffic participants to take action in advance to avoid risks.



Intelligent Mobility
We have been researching Cooperative Intelligence that can independently understand not only the ambient environment but a person’s intention and action, and that can communicate with each other through behavior and/or language to take cooperative action. We provide people with the three “at wills” to realize the safe, secure, and free mobility of people and things by applying Cooperative Intelligence to the autonomous driving system, driving assistance system, riding micro-mobility, and micro-mobility robots.
Autonomous driving: Move freely “at will” under automation
Driving assistance: Drive confidently “at will” by oneself
Micro-mobility: Use “at will” easily anytime, anywhere


AI Driver Model
The research of visual behaviors and brains has shown that a beginner or an elderly driver cannot afford to drive his or her vehicle looking around. It is thought that this results in the anxiety for driving or an accident. The AI caution assumption model, first developed by Honda ahead of other companies, notifies a beginner or young driver of the risks predicted, resulting in safe action “by himself or herself” at an earlier stage. Elderly drivers tend to be delayed in responding to the events such as the yawing of a vehicle and a delay in braking, which leads to anxiety for driving or an accident. We have been researching the operation assistance that will guide the drivers so as not to have the yawing problem thanks to the driving action model of the AI by grasping the characteristics of elderly drivers.

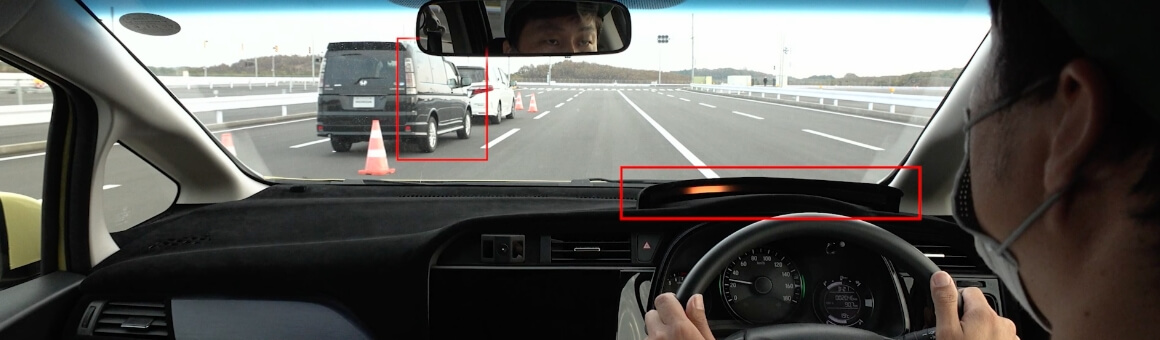
Next-Generation HMI
Using AI and next-generation HMI, we are working on research into the technologies that keep risks away from approaching and prevent any risks from being overlooked. Specifically, being based on AI’s risk prediction and understanding of the driver’s condition, the HMI technology notifies the driver of the increased risk intelligibly by using a risk indicator (visual), seat belt control (tactile), stereophonic sound (auditory), etc.; and reduces the driver’s drowsiness or distraction with biofeedback. We aim to provide new value of safety and security through appropriate driving assistance depending on each driver’s cognitive state and traffic scene.

All-Solid-State Battery
The expectations for the batteries on board are low cost and the increase in the cruising range. The battery under development uses a higher-capacity anode than usual, but its high activity causes a side reaction with the electrolyte, resulting in low charge-discharge efficiency. In addition, lithium dendrite growth during charging is a safety concern. We try to solve these problems by adopting a solid electrolyte. Moreover, we aim for the electrodes that can be mass-produced at low cost. To realize their high-speed mass production, we have been striving to establish both making slurry and painting of cathode composite, as well as a roll press process to ensure the electrode packing density and interface adhesion. Furthermore, to maximize the energy density, we have been working on making the materials into thinner layers that do not contribute to energy.
- Field
- Innovative Research Excellence
- Innovative Research Excellence,
Power Unit & Energy - Design Center
- Material Research Center
- Corporate Development Center

