Honda P2 IEEE Milestone Dedication Ceremony
Honda Robotics × IEEE Recognition | Ceremony Report
Honda P2 IEEE Milestone Dedication Ceremony
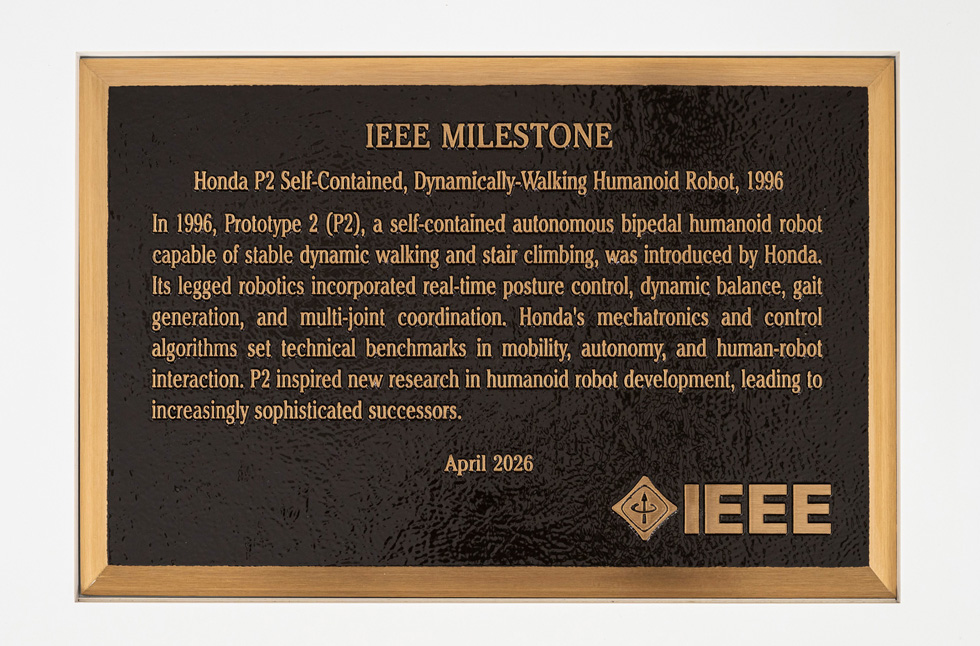
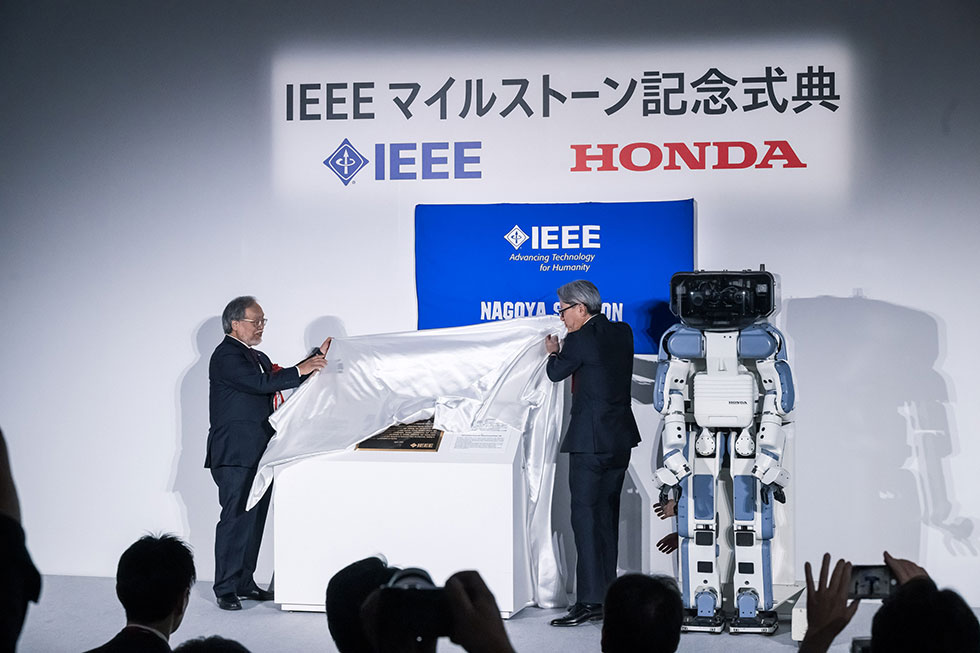
On the morning of April 28, 2026, people connected to the project gathered in the hall of the Honda Wako Building. Thirty years have passed since Honda introduced P2, its bipedal humanoid robot, in 1996. That achievement has now been recognized as an IEEE Milestone — an historic achievement that contributed significantly to the advancement of society and industry.
What IEEE recognized was not only Honda’s control technology for bipedal walking amassed through the development of P2. At a time when robots were primarily regarded as fixed industrial equipment used on production lines, Honda created a new concept of robots — equipped with flexible intelligence and designed for a wider range of applications beyond industrial uses, including social and assistive roles.
At the dedication ceremony, the milestone plaque was presented by Professor Toshio Fukuda, Professor Emeritus of Nagoya University, who served as IEEE President and CEO in 2020 and was the first IEEE President from the Asia Pacific region, to Toshihiro Mibe, Director, President and Representative Executive Officer of Honda Motor Co., Ltd. For Honda, this was its first IEEE Milestone in the field of robotics, and its second overall following the Honda Electro Gyrocator in 2017. In his speech, Mibe expressed gratitude for the recognition and spoke of Honda’s strong commitment to continuing to overcome challenges and develop new technologies.

“We see this recognition as an acknowledgment not only of the technical excellence of P2 as a robot, but also of the spirit of challenge demonstrated by Honda engineers who devoted themselves to its research and development. Honda will continue taking on difficult technological challenges as we strive to serve people worldwide with the joy of expanding their life’s potential.” ── Toshihiro Mibe, Director, President and Representative Executive Officer, Honda Motor Co., Ltd.
Following the plaque presentation by IEEE, Mibe presented appreciation plaques to those who had contributed to the project. Universities, research institutions, and suppliers that supported the development of P2 were invited to the stage, and each name was met with applause from the audience.


Recipients of Appreciation Plaques
| Organization / Company | Contribution |
|---|---|
| Asahikawa Medical University | Contributed to the establishment of the basic concept for the walking control system by providing knowledge related to the integrated functions of posture control and walking. |
| Kanagawa Rehabilitation Center | Contributed to the determination of the joint configuration and specifications of Honda’s early walking robots by providing measurement technologies and expertise not possessed by Honda, including walking pattern measurement and ground reaction force analysis. |
| Harmonic Drive Systems Inc. | Contributed to the realization of walking robots from the early stages of research by addressing a wide range of technical challenges related to reducers, including miniaturization, thinner profiles, lighter weight, lower inertia, and reduced friction. |
| Showa Measuring Instruments Co., Ltd. | Contributed to the realization of walking robots from the early stages of research by addressing technical challenges in line with the progress of development, including the miniaturization, weight reduction, and performance improvement of six-axis force sensors. |
| Micom Measuring Engineering Co., Ltd. | Contributed to the realization of bipedal walking control by miniaturizing and integrating functions into controller boards for compact multi-axis robot control. |
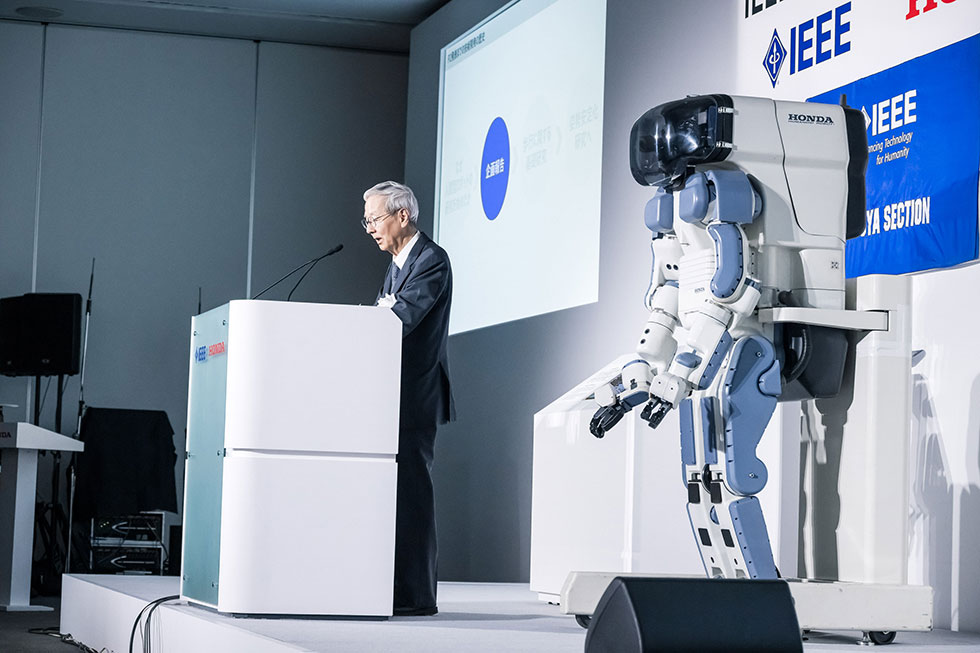
After the presentation ceremony, commemorative lectures were held. Representatives from IEEE spoke about the significance of P2’s recognition, one of the original developers shared the story behind its development, and a current researcher traced the technological lineage that continues from P2 today. It was a two-hour program in which three speakers illuminated the meaning of those 30 years from their respective perspectives.
Commemorative Lectures
-

- Lecture 01 Toshio Fukuda “What P2 Changed — A Conceptual Shift Recognized by IEEE” Professor Emeritus, Nagoya University / Former IEEE President and CEO / Former President, IEEE Robotics & Automation Society
Taking the stage with a smile and a congratulatory message, Professor Fukuda opened his talk by warmly setting the tone in the hall. “I have had a long relationship with P2. It feels almost like a classmate,” he said. As someone who had watched the robot’s evolution since its unveiling in 1996, his joy at this recognition was evident.
Professor Fukuda first encountered P2 on the international stage in France in 1997. At an event commemorating the 10th anniversary of the academic journal of the Robotics Society of Japan, P2 suddenly appeared, astonishing the audience. “It was an epoch-making moment. Everyone was surprised,” he recalled. At a time when robotics researchers around the world were focusing mainly on quadruped and wheeled robots, a human-scale humanoid robot capable of autonomous bipedal walking had emerged.
Speaking about the recognition for which he presented the plaque, Professor Fukuda explained that this was the 293rd IEEE Milestone worldwide and the 58th from Japan. P2 has now joined the ranks of historic Japanese technological achievements such as the Tokaido Shinkansen and the Mount Fuji Radar System.
“P2 did more than simply walk. It showed the world a new concept: that robots could support people in society, including in fields such as medicine, education, and rehabilitation. That turning point is precisely why P2 was recognized as an IEEE Milestone.” ── Professor Toshio Fukuda, Professor Emeritus, Nagoya University / Former IEEE President and CEO
Now over 75 years old and still active at the forefront of research, Professor Fukuda continues to expand his interests across fields such as micro- and nanorobotics, biomimetic robotics, and Physical AI. “Recently, I have been making cockroach robots,” he said, briefly surprising the room before calmly continuing, “They can move underwater as well. We are taking inspiration from how cockroaches survive by producing oxygen on their own.” He concluded his lecture with a powerful message of encouragement: “With Honda’s power, I hope you will continue changing the world.”
-

- Lecture 02 Toru Takenaka “The Path to Developing P2 — Taking on the Impossible” Former Honda R&D Co., Ltd. Associate / P2 Developer / Special Advisor, Workroid Users Association
Takenaka joined Honda in 1989, the first year of Japan’s Heisei era. Drawn by the simple phrase, “We’re doing something interesting,” he decided to join the company. What awaited him was an immediate initiation on his very first day. “We’re making this robot, but we’re having trouble getting it to walk.” From that day forward, his career as the control engineer for Honda’s bipedal walking robot began.
The research itself had begun in 1986. Honda took on the challenge of creating an autonomous humanoid bipedal robot head-on, even though it was said to be “impossible to achieve within the 20th century.” The common belief at the time was that the more rigidly the feet were fixed, the more stable the robot would become. In reality, the opposite was true. The stiffer the feet became, the more the robot fell. Facing a dead end, the team arrived at a fundamental shift in thinking: what if they made the soles of the feet softer?
“On the day I joined Honda, I was told, ‘We’re having trouble getting it to walk,’ and I became responsible for P2’s control system. We thought the robot would become stable if we fixed the soles of the feet firmly, but that was completely wrong. By making them softer, the robot could brace itself. That shift in thinking was where everything began.” ──Toru Takenaka, P2 Developer
This insight would become connected to Honda’s unique walking control technologies, including ground reaction force control, target Zero Moment Point control, and landing position control. These technologies enabled P2 to achieve stable, human-like walking, as well as real-time generation of leg movements that allowed it to walk on uneven floors and slopes, and ascend and descend stairs.
During the screening of footage from P2’s unveiling, there was a moment when the audience held its breath. The scene showed P2 walking at 2 km/h down a corridor in the design studio at the Wako Research Center. In its path was a red Italian sofa, which cost approximately 800,000 yen at the time. “I only learned about it just before the demonstration, so I was even more nervous when P2 passed beside it,” Takenaka recalled. The paper published in 1998 was cited more than 1,300 times over the following 10 years and received an award from IEEE as one of the most influential papers.

-

- Lecture 03 Takahide Yoshiike “The Path Continuing from P2 — From Feet to Hands, and Then to Avatars” Executive Chief Engineer, Frontier Robotics Research, Integrated Research Center, Honda R&D Co., Ltd.
“I would like to talk about Honda robotics after P2,” Yoshiike began. His lecture traced the technological lineage from P2 to ASIMO, and onward to Honda’s latest Multi-fingered Hand and avatar robot, using actual footage to illustrate that evolution.
The technologies amassed through the research and development of P2 were carried forward into ASIMO, the humanoid robot Honda announced in 2000. ASIMO achieved more natural and smoother walking that closely resembles human gait, along with the ability to run at up to 9 km/h, hop on one foot, and pass by people while recognizing them. Today, the balance control technologies behind these capabilities are being applied across a wide range of areas, including walking assist devices, underwater robots, and electric mobility.
When Yoshiike shifted topics by saying, “Next, I would like to talk about hands,” the atmosphere in the room changed. He was about to trace Honda’s 30-year history of “hands,” beginning with a three-fingered hand developed in 1997. “The stretching and friction of wires were major barriers. It was not easy to achieve our goal of enabling delicate work with a level of force comparable to that of a human,” he reflected candidly.
“ASIMO runs, jumps, and passes by people. At the root of each of those movements is the control philosophy established through P2. Feet, hands, avatars — everything began with P2.” ── Takahide Yoshiike, Executive Chief Engineer, Frontier Robotics Research, Integrated Research Center, Honda R&D Co., Ltd.
Honda’s latest Multi-fingered Hand currently under development combines dexterity, power, and durability at human scale. It features 16 actuated joints, a maximum continuous joint velocity of 180 deg/sec, and a maximum continuous fingertip force of 50 N. It has also completed more than 450,000 practical durability test cycles.
The hand can grasp a wide range of objects and manipulate tools designed for humans. It can also perform delicate tasks such as threading a needle and precisely tightening a small screw — tasks that are difficult even for humans. When Yoshiike said, “We have finally reached a practical level where it can work like a human,” audible surprise spread through the audience. He closed with a strong statement: “Through Physical AI, an era is coming in which robots will be able to acquire skills on their own. We are continuing along the path that P2 opened.”