
「ロボットはね、人の役に立ってこそロボット。技術は、人の役に立ってはじめて〝使える技術〟と呼べるんですよ」――ロボット開発の責任者、重見はそう語る。東日本大震災とともに発生した福島第一原発の事故。連日メディアでは、刻々と変化する状況が報じられた。時を同じくしてHondaにはお客様の声が殺到した。「ASIMOを原発に派遣できないか」――ASIMO開発チームの技術者たちにとっては、胸を突かれる言葉だった。「ASIMOは、もともとの目的や設計要件が異なるので、そのまま投入できないことはすぐ分かりました。ただ、ASIMOが無理でも、その過程で培った技術は絶対何かの役に立てると思った。でも情報が手に入らなかったんです。技術を持ちながら、何に、どう役立てたらいいのかが分からなかった……悔しかったですね」。求められているのに、すぐに手を出せないジレンマ。人が立ち入れない危険な場所でこそ、ロボットはその役割を果たすことができるのに。

-
(株)本田技術研究所
基礎技術研究センタ-
ロボット開発責任者 福島第一原発向けロボット開発チームの発足から出荷に至るまで、すべてを見てきた。「人の役に立ってこそ、ロボット」という想いが、今回の取り組みを通じていっそう強まった。
福島第一原発向けロボット開発チームの発足から出荷に至るまで、すべてを見てきた。「人の役に立ってこそ、ロボット」という想いが、今回の取り組みを通じていっそう強まった。

-
(株)本田技術研究所
基礎技術研究センタ-
調査用アームロボット プロジェクトリーダー 調査用アームロボットのプロジェクトリーダーとして、メンバーを引っ張った。「できない理由ではなく、どうやったらできるかを考えてくれ」と開発期間中は口を酸っぱくしてメンバーへ伝えた。
調査用アームロボットのプロジェクトリーダーとして、メンバーを引っ張った。「できない理由ではなく、どうやったらできるかを考えてくれ」と開発期間中は口を酸っぱくしてメンバーへ伝えた。

2011年4月1日。重見とプロジェクトリーダーの松本は本田技術研究所の山本社長のもとを訪れた。会社として、正式に原発対応への技術支援の了承を得るための、話し合いの場。伝えたのは、技術者としての正直な想いだった。「ASIMOで培ってきた自分たちの技術でしかできないことが、必ずある。その技術で、人の、社会の、役に立ちたいと伝えました」松本は当時を振り返りそう語った。
やると言ったら後には引けない。絶対、最後までやりきらなければならない。当然、進行中の研究計画、開発計画もあった。しかし、それをおしても原発対応のための技術支援を実現したかった。「ASIMOの開発は、人とロボットが共存する未来を見据えたものです。でも、私たちの技術で救えるかもしれない、目の前で困っている人をないがしろにして、未来も技術もないでしょう」――メンバーの想いは届いた。山本社長は、すぐに承諾してくれたのだった。

正式なプロジェクトとして発足後、チームの動きは目まぐるしいものだった。2011年6月。東京電力の技術開発研究所、そしてロボット研究で交流のあった産業技術総合研究所(以下、産総研)と手を組み、3社で仕様の検討が始まった。「一番の難関は、ロボットの機能を定めることでしたね。原発内部の状況が定まらず、情報が錯綜する中、事故収束に向けて今後どんな機能がロボットに求められるのか、検討を重ねました。仕様確定までには実に3カ月を要しました」。最初に求められたのは、バルブ開閉用の作業アームロボットの開発だった。仕様を固める一方で並行して開発にも着手した。日々、現場でリスクを負いながら作業をしている人を思うと時間的猶予はない。開発中も、現場の情報が入る度に仕様変更は続いた。持てる技術を投入し、とにかくスピード重視で開発が進められた。そして2011年11月8日、Hondaはバルブ開閉用の作業アームロボットのプロトタイプを発表。開発期間約3カ月という異例の速さだった。

しかし、このバルブ開閉用の作業アームロボットの投入は当面見送られる結果となった。実際の納入に向けて、福島第一原発の現地スタッフと調整を始めたところ、福島の現場では、バルブ開閉よりも緊急性の高いニーズがあることが分かったのだ。求められたのは、原発内の細部をモニタリングする「高所調査用ロボット」だった。福島第一原発には既に他社製の調査用ロボットが数台投入されていたが、多数の配管が入り組んだ高所を調査できるロボットはまだなかった。「本当に必要なものが何かを知っている人は、当然ですが現場にいるんです。一見、まわり道のようですが、ここでようやく、〝真のニーズ〟にたどり着くことができたんです」と開発メンバーは語る。
急遽の仕様変更。より高度なアーム技術が求められるため、先端をカメラに付け替えるだけでは済まない。ほぼゼロからの再スタートとなった。開発メンバーは「機能変更は確かにショックでした。でも、それより現場の真のニーズが明確になったことがうれしかった。他のメンバーも同じ心境だったと思います」と振り返る。

「バルブ開閉用」から「高所調査用」へ――目的を変更し、再び急ピッチで開発が進められた。そして2012年10月、より現場に近い環境下でテストを行うため、仕上がりつつあるロボットを停止中の原発内に持ち込んで実証実験を開始した。1カ月にわたる実験期間中、チームメンバー全員が原発の現場を体験した。ソフトウェア開発の担当者は「たとえば、原発内の施設に入る時の服装。防護服を着た状態で手袋越しに操作するのと、研究室で素手で操作するのとでは想像以上に操作性に大きなギャップがありました。現場に足を運ぶことの大切さが、改めて身に染みましたね」と振り返る。
現場となる原発の内部は、ロボットが活動するには想像以上に過酷な環境だった。床や天井に張り巡らされている配管パイプやダクト、無数のケーブル。キャットウォークと呼ばれる高所にある渡り廊下や、人がかがんでようやく通れるくらいの、狭く、暗い通路……実際の福島原発内の現場環境は、事故の影響でさらに悪化している可能性も高い。
しかし、厳しい環境を踏まえてなお、システムトラブルや悪路に阻まれ、途中で動けなくなる事態に陥ることだけは避けねばならない。それはロボットが、後続の作業を妨げる、重量1t以上の障害物になることを意味する。プロジェクトリーダーの松本は繰り返し伝え続けた。「とにかく現場で使えるか、現場で役に立つかを考えるよう、その視点を持てと伝えました。あらゆる状況を想定しろ、と。どんなに厳しい環境でも、私たちが諦めてはいけないんです。できない理由ではなく、できるための方法を探す。それが技術者たる私たちの価値なんだから」。泥臭く現場へ行く。現場で学び、検証し、現場へ返す――いつしか、開発チームは、全員がそれぞれの担当領域の垣根を越えて動くようになっていた。
結果、障害物までの距離を操作者が把握しやすいように、ロボット開発で培われたレーザーレンジファインダーを採用した三次元ポイントクラウド(点群座標)による表示技術の活用など、現場での気付きは、開発の過程で次々とロボットに反映されていった。
数えきれぬほどの仕様変更と改良を経て、ついに高所調査用ロボットは完成した。 2013年6月18日――東京電力の福島第一原発でついに稼動を開始した。
震災を経て、Hondaのロボット開発は2012年の春から、新たな挑戦に乗り出している。主に工場などにおける災害発生時の初期対応と見回り点検などを想定した減災ロボット(災害用ヒューマノイド)の開発だ。東日本大震災を経て、災害対応用ロボットの必要性が改めて浮き彫りになった。人に代わって危険な場所で作業できるロボットが、今、求められているのだ。 HondaRoboticsは新たな可能性を見据え、再び歩きはじめた。その原動力となるのは、「技術は人のために」――いつもこの言葉だ。


- 高所調査用ロボット完成間近。出荷後の不備は許されない。緊迫した雰囲気の中で、作業が進められていた
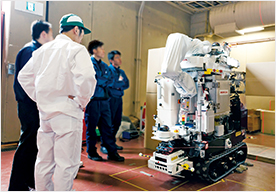
- 出荷間近の高所調査用ロボット。ぎりぎりまで、東京電力の方々と検証を続けた

- 出荷に立ち会った開発メンバーと産総研の方々。ホッとした表情を見せつつ、「現場で稼働するまでは成功とは言えない」との声が聞かれた




