MULTI-FINGERED HAND
多指ハンド
器用さ、力強さ、耐久性
人サイズで実現する唯一のハンド
TECHNOLOGY
多指ハンドを支える技術
TECHNOLOGY / 技術詳細

Dexterity
16 DOF / 180 deg/s16関節の精密な駆動と親指の対向構造により人の手に近い把持を実現し、最大180deg/sの高速動作で素早いハンドリングにも対応します。
Power
50N / 150s最大50Nの指先(フィンガーティップ)力を発揮でき、その力を最大150秒間維持できます。


Durability
450,000+ cyclesさまざまな指先荷重条件のもとで45万回の耐久サイクルを完了しており、そのうち24,000回は5kgの重量物を持ち上げる試験を含んでいます。
Impact Resistance
1.23m/s手先を1.23m/sで障害物にぶつけても、力を検知しいなすことができます。


Tactile Sensor
288 channels各指先の6軸力覚センサに加え、指・手のひらに計288チャンネルの触覚センサを搭載し、接触を高精度に検知して繊細な操作を実現します。
FEATURES / 特徴



人の手はスリムながら「繊細さ」と「力強さ」を兼ね備えますが、ロボットにはその両立が困難でした。私たちの多指ハンドは、コインをつまむ緻密さと50Nの出力を人間サイズで実現。ついに「人のように働く」実用レベルへと到達しました。
WORK SCENES
作業シーン
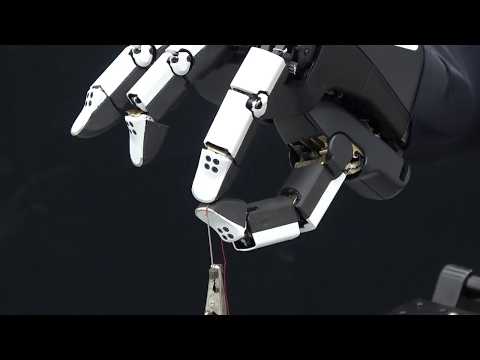
糸通し

小ねじの手締め

ねじの操作
ハサミの操作
論文リスト
多指ハンドに関する研究成果
-
“R2-Dreamer: Redundancy-Reduced World Models without Decoders or Augmentation”,
In Proceedings of the International Conference on Learning Representations (ICLR), 2026.
-
“Relative Geometrical Constraint on Finger Motion for Dexterous Teleoperation of Multifingered Hand”,
IEEE/SICE International Symposium on System Integration (SII), 2026.
-
“Touch-Based Manipulation with Multi-Fingered Robot using Off-policy RL and Temporal Contrastive Learning”,
IEEE International Conferences on Robotics and Automation (ICRA), 2024.
-
“Quadratic Programming Based Inverse Kinematics for Precise Bimanual Manipulation”,
IEEE International Conferences on Robotics and Automation (ICRA), 2024.
-
“Offline Reinforcement Learning with Mixture of Deterministic Policies”,
Transactions on Machine Learning Research, 2023.


