Honda ロボット開発の歴史
「社会と共存・協調しながら、人間社会に新たな価値をもたらすモビリティとして創造したい。」
技術者たちの熱意から、最先端の2足歩行技術をもつ人間型ロボットは誕生しました。
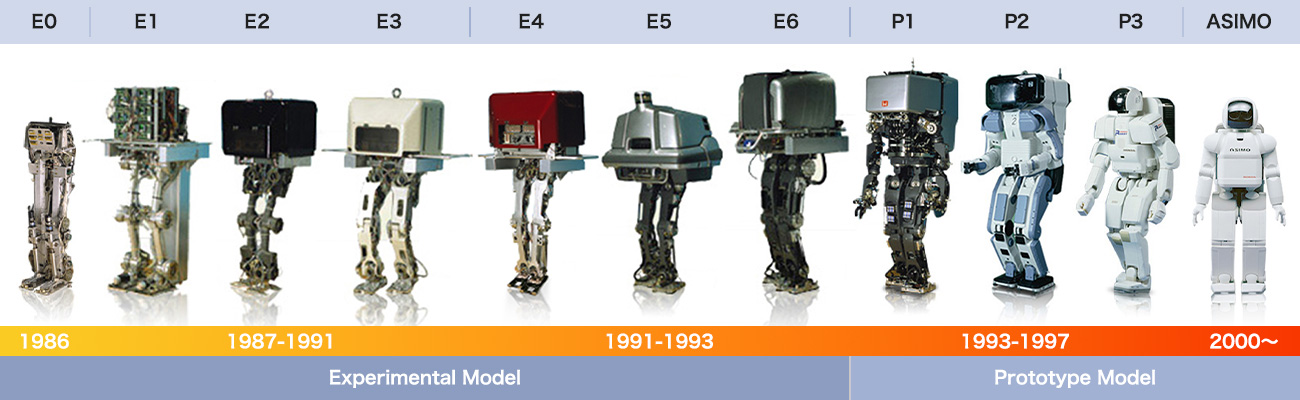
1986年のE0から始まるHondaのロボット開発の歴史をご紹介しています。
人間をモデルに。
新しいモビリティの創造性をめざして人間型ロボットの開発がスタート
1986 2足歩行の原理究明 まずは、2本足で歩かせてみる
EO
二足歩行原理の研究用に作った最初のロボット。足を交互に出して歩くことに成功。しかし、まだ一歩におよそ15秒もかかり、直線での「静歩行」による移動でした。
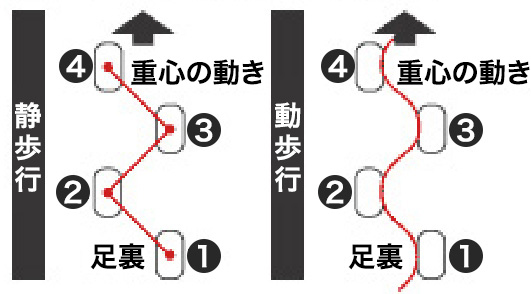
静歩行と動歩行
・静歩行は、常に身体の重心が足裏の範囲に入るように歩く。
・身体の勢いを使ってスムースに歩く動歩行では、重心が足裏に常にあるとは限らない。
E0

1987-1991 2足歩行の実現 人間がどのように歩いてるかを調べる「動歩行」を実現する
E1-E2-E3
「動歩行」を実現するために、徹底的に人間の歩行を研究・解析を行いました。人間の歩行だけでなく、動物の歩行を含めて、あらゆる歩行の観察研究を行い、2足歩行に必要な関節の配置や動調べました。人間の歩行データを参考にして動歩行プログラムを作成し、ロボットに移植して実験を行いました。
E1

E2

E3

1991-1993 2足歩行の基本機能完成 「歩行安定化技術」を確立する
E4-E5-E6
Hondaは歩行安定化技術の研究に取り組み、3つの制御技術を開発しました。
安定歩行を実現する3つの姿勢制御

E4

E5

E6

人間型ロボットへの進化。
実用化に向けた新しい技術の開発
1993-1997 完全自立人間型ロボットの研究 人間型ロボットへの進化
P1
腕と胴体がついて、いよいよ本格的な人間型ロボットへ。
人間型ロボットのモデル第1号機
全高1,915m、重量175kg、電源、コンピュータは外置き。スイッチのオン・オフ、扉の取っ手つかみ、ものを掴んで運搬するなどの動作を実現。腕と脚の協調した動きの研究が行われました。
P1

P2
はじめて世の中に発表された人間型ロボット・リアルな動きが評判に。
世界初人間型ロボットのスタイルを公表
1996年12月に発表された世界初の人間型自立2足歩行ロボット。
全高1,820mm、重量210kg
ワイヤレス化を図り、胴体部にコンピュータ、モータドライブ、バッテリー、無線機器等、必要な機器を全て内蔵、自在な歩行、階段の昇降、台車を押す等などの動作がワイヤレスで、かつ、自動動作により実現しました。
P2

P3
小型・軽量をポイントに進化。楽しい人間の仲間としてのロボットへ。
人間の仲間としてのロボットへ
1997年9月に完成した完全自立人間型2足歩行ロボット。
全高1,600mm、重量130kg
部品の材質の見直しや、分散型の制御を取り入れて小型化・軽量化を実現。人間の生活の場
にとけ込めるサイズに近付いて来ました。
P3

人間のパートナーに。
実用化に向けた新しい技術の成果としてASIMOが誕生
2000~ より身近に、よりスムーズに
ASIMO
さらに小型・軽量化が進み、より進化した歩行技術・i-WALKを搭載 (2000年)
一般的な生活空間で使用されることを前提に、歩行自在性の更なる向上およびシステムの 簡素化を実現しました。身近にある普通の階段や、斜面を含む環境でも自在に移動することができる他、ユーザーのニーズに合わせた専用動作や案内説明のコンテンツを付与することが可能になりました。
ASIMO

写真は2000年発表時のASIMOです。
ASIMO開発の歴史
2000 より身近に、よりスムーズに
さらに小型・軽量化が進み、より進化した歩行技術・i-WALKを搭載。
一般的な生活空間で使用されることを前提に、歩行自在性の更なる向上およびシステムの簡素化を実現しました。身近にある普通の階段や、斜面を含む環境でも自在に移動することができる他、ユーザーのニーズに合わせた専用動作や案内説明のコンテンツを付与することが可能になりました。
新機能
・スムーズな歩行を実現した”i-WALK”技術

2001 レンタル事業用ASIMOを発表
レンタル事業用として機能進化を図り、実用性を向上。
一般的な生活空間で使用されることを前提に、歩行自在性の更なる向上およびシステムの簡素化を実現しました。身近にある普通の階段や、斜面を含む環境でも自在に移動することができる他、ユーザーのニーズに合わせた専用動作や案内説明のコンテンツを付与することが可能になりました。
新機能
・自在歩行技術の向上
・ヒューマンインターフェースの向上

2002 知能化技術を搭載した新型ASIMOを発表
人の姿勢やしぐさの意味を理解して自律的に行動できる知能化技術
人の姿勢やしぐさの意味を理解して自律的に行動できる知能化技術を搭載した新型ASIMOを発表しました。接近する人に挨拶する、人に追従する、指示された場所に移動する、また顔を認識して名前を呼ぶなど人応答機能が大きく進化。さらにインターネットなどを介した情報の提供や、案内などのサービスを可能としました。
新機能
・認識技術によるコミュニケーションの進化
・ネットワークとの結合

2004 人間と共存、強調できる新たなモビリティーを目指して
機敏な行動が可能に
人間と共存、協調できる新たなモビリティーを目指して、実環境のなかで、すばやく状況を判断して、機敏に行動することを可能とする次世代ASIMOの技術を発表しました。
新機能
・スピーディーな動き
・自律連続移動
・人に合わせた動き
・人に近い走り
・移動時の環境認識能力の向上
・ワゴン操作
・トレイ運搬
・走行機能の向上
・全身協調運動

2005 知的・身体能力を高次元で合わせ持つ、人間型ロボットの実現
人に合わせて行動する機能を強化
従来に比べ、人と手をつないで一緒に歩くなど、人に合わせて行動する機能を強化すると共に、ワゴンを使った運搬機能も追加。さらにこれらの機能を総合的に実行する統合制御システムを開発したことにより、受付案内や、デリバリーサービスなどを自動で行なうことができるようになりました。また、走行能力を飛躍的に向上させて、時速6kmの走りや旋回走行なども可能になりました。
新機能
・コミュニケーション能力の向上
・移動時の環境認識能力の向上
・ワゴン操作
・トレイ運搬
・走行機能の向上
・全身協調運動

2007 人や複数のASIMOがいる環境下で、複数のASIMOが連続してサービスを提供
複数のASIMOをネットワークで結ぶことにより、各々のASIMOの作業状態を共有し、それぞれのASIMOが最も効率の良い割合で作業を分担することで、共同作業を実行します。具体的には、各々のASIMOの現在位置と、作業を実施する位置までの距離を算出し、バッテリー残量を考慮しつつ、全体として最も時間効率の良い作業分担を導き出し、それに基づき各ASIMOが自律的に作業を行います。
新機能
・複数体で共同作業ができる
・連続でサービスが可能
・移動・作業の自立性向上
・共同作業機能
・すれ違い、回避行動機能
・自律充電機能

2011 世界初の自律行動制御技術を新たに搭載
自律性がさらに高まり、人の操作を介在せずに連続して動き続けることが可能となりました。 また、知能面、身体面ともに状況適応能力が格段に向上したことで多くの人が行き交うパブリックスペースや、オフィスといった環境での実用化にまた一歩近づきました。
新機能
<知的能力の進化>
・お客様へのプレゼンを中断し、お客様に飲み物が来たことを知らせる
・3人が同時に発する言葉を聞き分ける
・人の歩く方向を予測して、ぶつからないように進む
<身体能力の進化>
・時速9km走行
・両足ジャンプ・片足ジャンプ
・凹凸のある路面を踏破
<作業機能の向上>
・水筒を握り、ふたを開け、紙コップに水を注ぐ
・手話表現