
What is Real Time AWD?
Honda AWD (All-Wheel Drive) optimizes distribution of driving force to all four wheels to offer more secure and enjoyable driving than standard two-wheel drive.
First introduced in February 2018, the latest version of Real Time AWD takes four-wheel drive to the next level. Predicting from the driving conditions, the system precisely optimizes the distribution of front and rear driving force to enhance security on snow-covered roads and other slippery surfaces and support stable, nimble cornering on dry paved roads. Based on its assessment of driving conditions, the system can reduce driving force to the rear wheels to maintain driving performance while increasing fuel economy.
Real Time AWD in various situations
Taking four-wheel drive to the next level, Real Time AWD optimizes front and rear driving force distribution based on driving conditions. To control driving force, the system uses a range of sensors that monitor steering angle, throttle opening, and more.
By continuously and accurately assessing changing conditions and proactively controlling the distribution of driving force, the system helps provide a more secure and stable driving experience.
Cornering
Climbing
How the system works during cornering
Real Time AWD continuously assesses the vehicle's condition based on information from sensors that detect steering angle, yaw rate, accelerator pedal position, wheel speed, transmission gear, and more. Thus, when the driver depresses the accelerator pedal when exiting a curve, the system can instantly calculate the ideal distribution of driving force and transmit the optimal amount of driving force to the rear wheels.
How the system works during cornering
Real Time AWD operates in four-wheel drive when the accelerator pedal is depressed. The moment it is released, the system stops distributing driving force to the rear wheels and switches to two-wheel drive. Thus, when the accelerator pedal is released during deceleration before cornering, the system disengages the mechanical connection with the rear wheels so that the vehicle can more easily change direction. In this way, the system helps prevent the vehicle from drifting outward and makes it easier for the driver to follow the curve.

How the technology works during acceleration through a curve
Real Time AWD continuously assesses the vehicle's condition based on information from sensors that detect steering angle, yaw rate, accelerator pedal position, wheel speed, transmission gear, and more. Thus, when the driver depresses the accelerator pedal when exiting a curve, the system can instantly calculate the ideal distribution of driving force and transmit the optimal amount of driving force to the rear wheels.
When the driver is accelerating through a curve, the system optimizes the distribution of front and rear driving force so as to reduce the load on the front wheels and enhance their turning capability. As a result, the system helps prevent the vehicle from drifting outward in the early stages of acceleration and makes it easier for the driver to follow the curve.
Rear wheel driving force transmission unit
This unit uses a hydraulic piston to depress a clutch and transmit driving force to the rear wheels. Based on the condition of the vehicle, the system makes fine adjustments to clutch pressure to deliver both a more a secure driving feel and superior handling performance.

Tire load balance (image)
This figure shows tire capacity as a circle whose area changes based on load transfer. For example, on an uphill road, load is shifted to the rear wheels, so the circle of the front wheels becomes smaller with a reduced grip limit. Also representing the friction coefficient between the road surface and the tire, the circle becomes extremely small on slippery surfaces such as snow-covered roads. A smaller circle means it is more difficult to accelerate and to turn. If significant driving force is applied, the car may reach the limit of its grip, making it difficult to turn. When driving force is optimally distributed between the front and rear wheels in a four-wheel drive system, load on the tires is likewise optimized, making it easier to accelerate and turn.

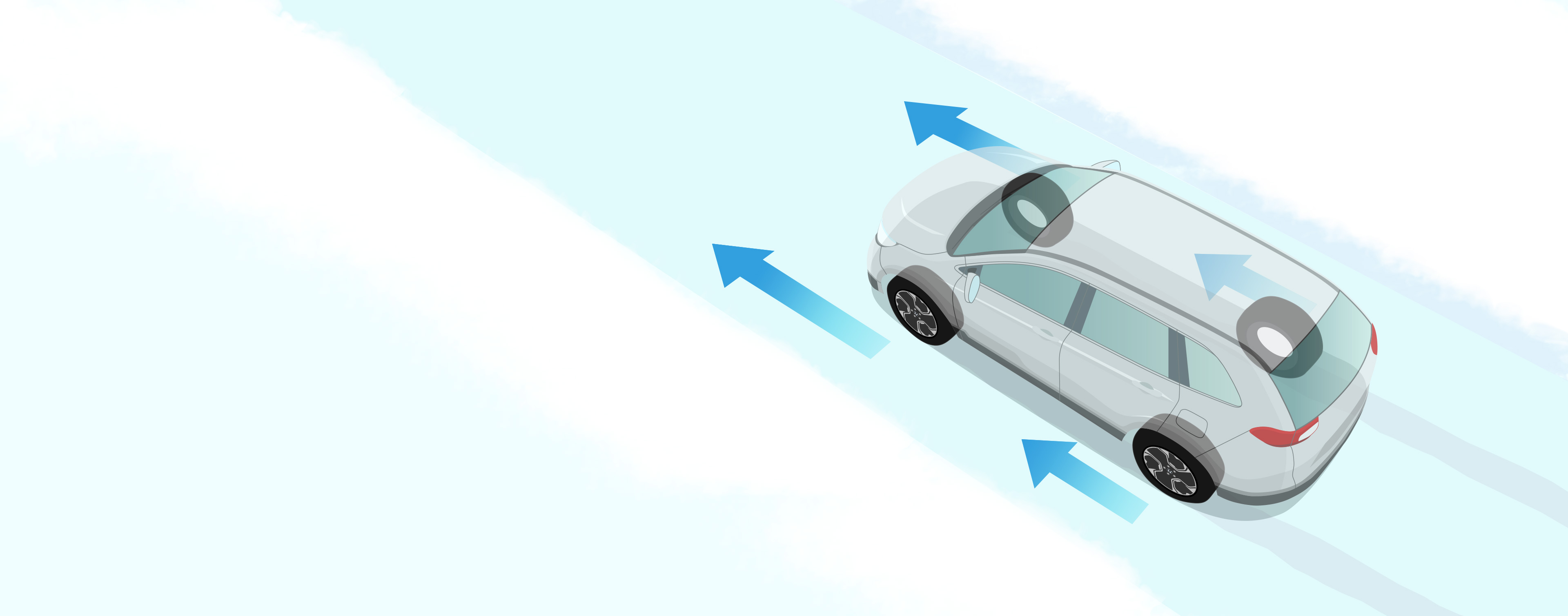
How the system works during incline starts
When Real Time AWD detects an incline based on G sensor information, it increases the distribution of driving force to the rear wheels, which on an incline bear a larger load and have a greater ability to transmit force than the front wheels. More power to the rear wheels helps the vehicle accelerate and begin to climb immediately.

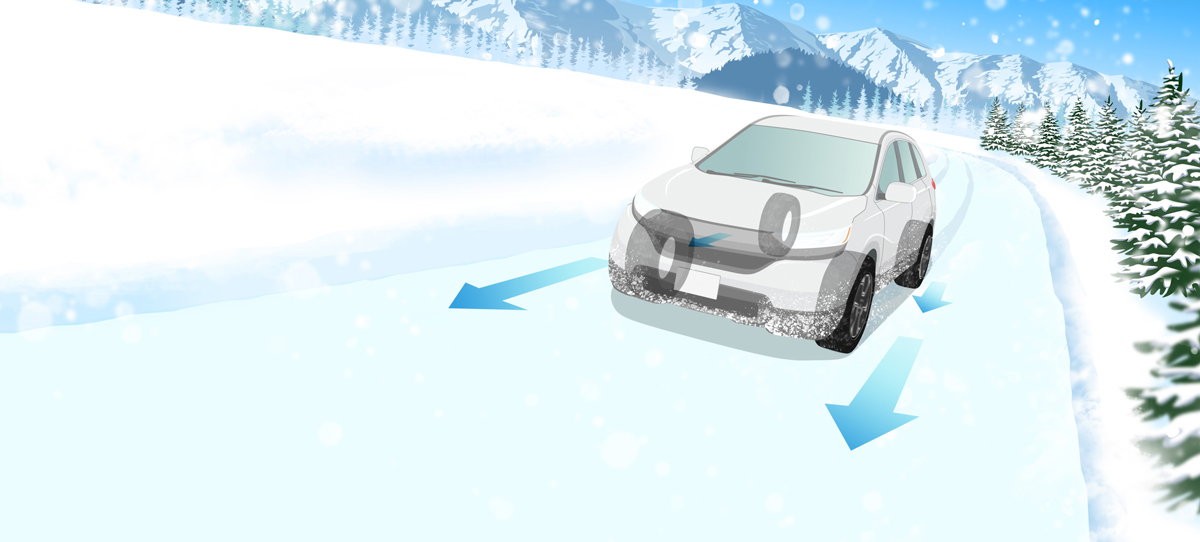
How the system works during incline starts
When the vehicle starts off on a flat road surface, the system bases the front/rear driving force distribution on the vehicle's front/rear weight distribution, since this is the ideal method for delivering stable driving. Thus, on a flat surface, the system uses a 60:40 driving force distribution, which is based on the weight distribution of a typical front-wheel drive vehicle. One weakness of front-wheel-drive vehicles, is their relative lack of traction when they start off uphill on slippery surfaces such as snow-covered hills. The reason is that load shifts to the rear on an uphill gradient, lessening the force pressing down on the front wheels and therefore also the wheels’ capacity to transmit force to the road surface.
When Real Time AWD detects an incline based on G sensor information, it increases the distribution of driving force to the rear wheels, which on an incline bear a larger load and have a greater ability to transmit force than the front wheels. More power to the rear wheels helps the vehicle start off and begin to climb immediately. In contrast, a system that distributes driving force to the rear wheels only after the front wheels slip causes a time lag to occur before the vehicle starts moving, a situation that drivers may find unpleasant. Thanks to its predictive control, Real Time AWD is exceptionally responsive, optimally distributing driving force to the front and rear wheels as soon as the accelerator pedal is depressed. The end result is greater control and peace of mind as the vehicle starts off.
Commitment to technology
Honda developed Real Time AWD by looking at four-wheel drive in a completely new way. When four-wheel drive is applied to a front-wheel drive architecture vehicle,driving force is generally transmitted to the rear wheels only once the front wheels have slipped. In contrast, Real Time AWD is designed to maximize the capability of all four wheels. Proactively distributing driving force to the rear wheels before the front wheels exceed their grip limit, including during starts, the system provides an additional margin of capability to the front wheels. The system thus helps the driver trace his or her intended line ahead and maintain vehicle stability while depressing the accelerator pedal with confidence.
Honda developed Super Handling All-Wheel Drive (SH-AWD), which distributes driving force not only between the front and rear wheels, but also to the left and right, to help drivers achieve exactly as they intend in all situations. The idea for improving on Real Time AWD was conceived during the development of SH-AWD. Honda engineers discovered that optimizing the distribution of driving force between the front and rear wheels significantly improves handling performance. Moreover, the benefits of this highly responsive control were observed not only on snow-covered roads but also on dry paved surfaces. To take full advantage of these benefits, Honda redesigned the control system of the unit that transmits tdriving force to the rear wheels. Under the previous control system, the unit could not always deliver the driving force requested by the onboard ECU. To overcome this issue, a new control system was designed without changing the hardware, making it possible to achieve an optimal front/rear driving force distribution in any driving situation. In addition, Honda optimizes the system calibration to match the characteristics of the model in which the ECU is installed.