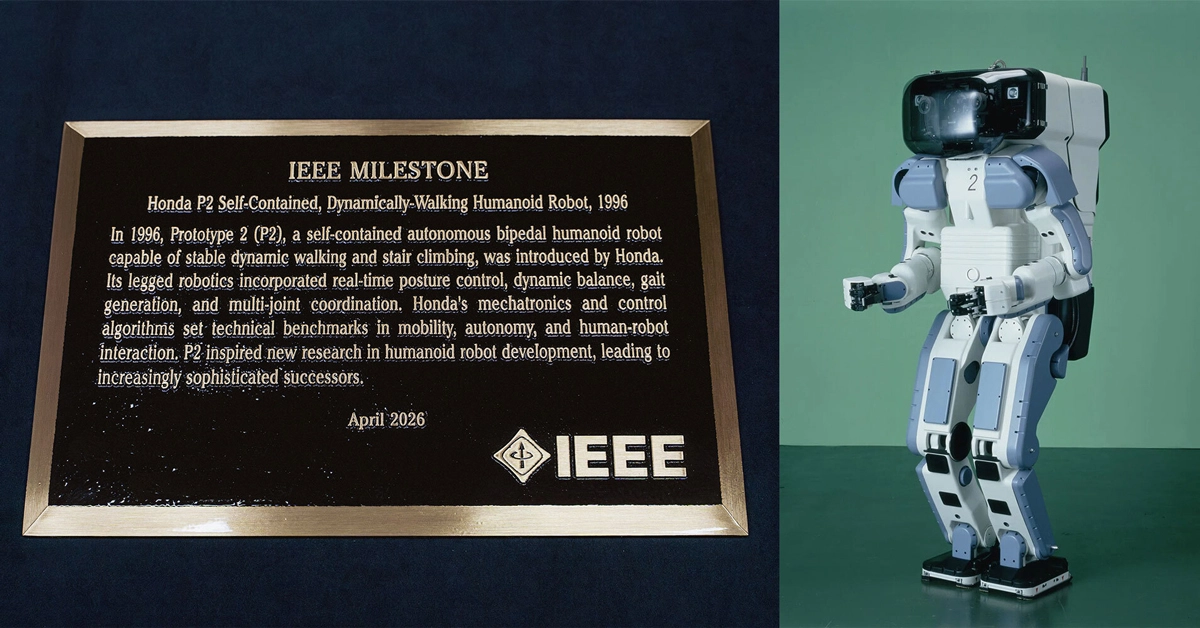
P2 Recognized as IEEE Milestone
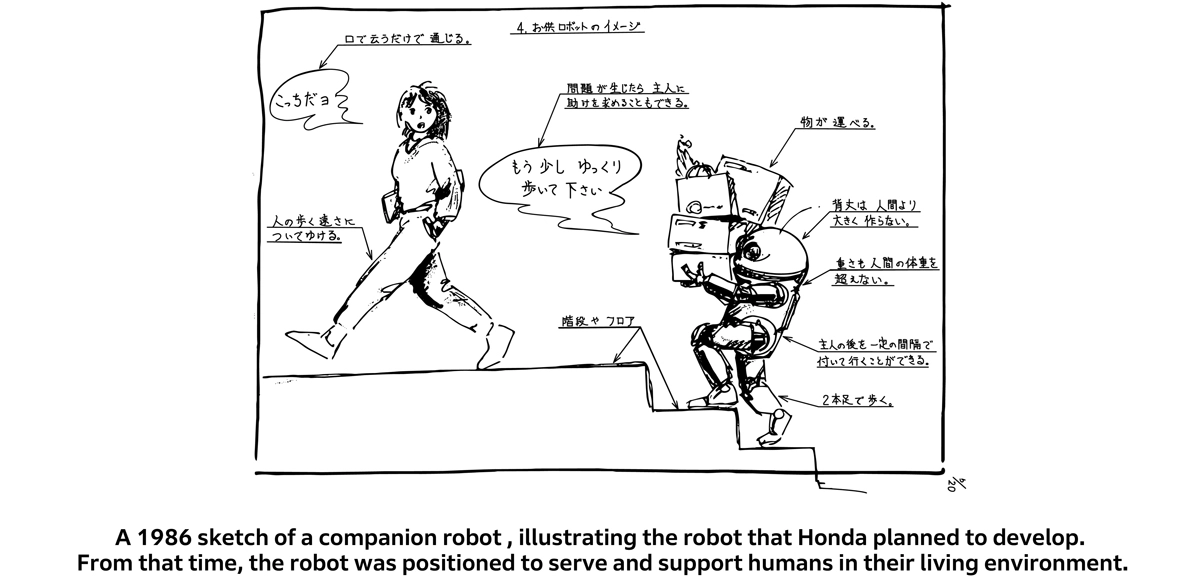
In 1986, Honda began research into the development of humanoid robots that would help people and serve as their partners. After about ten years of research, starting with understanding the fundamentals of bipedal walking, it announced the P2, a humanoid robot with a bipedal walking mechanism and dual-arm mechanism, in 1996. P2 greatly advanced Honda’s robotics technologies. It not only led to the birth of ASIMO four years later, but has also been highly regarded as an important technological achievement in the development of robotics worldwide to this day. It was therefore recognized as an IEEE*1 Milestone in April 2026.
Recognition as an IEEE Milestone, an Historic Achievement Contributing to the Advancement of Society and Industry
IEEE Milestones honor historic achievements that have contributed significantly to the progress of society and industry, and that occurred at least twenty-five years ago in the fields of electrical, electronic, information, and communication technologies. The P2 was recognized as an IEEE Milestone for its achievements in not only establishing the technical benchmark for interactions between humans and robots, but also driving international research into the development of humanoid robots, which led to the development of even more sophisticated successors. Honda was presented with an IEEE plaque for the P2 at a ceremony held on April 28, 2026, at the Honda Wako Building. This marked Honda’s second IEEE Milestone recognition, after the Honda Electro Gyrocator, which created a global standard for navigation systems, was honored as an IEEE Milestone in 2017.
*1 The U.S.-headquartered Institute of Electrical and Electronics Engineers (IEEE) is the world’s largest academic society in the fields of electrical, electronic, information and communications technologies. With over 530,000 members in more than 190 countries, IEEE is a non-profit organization taking a leadership role in fields of technology ranging from computers to biotechnology, communications, electric power, aerospace, and electronics.
P2’s Debut Shocks the World
When the P2 was unveiled in 1996, robots had practical applications as fixed industrial equipment for welding, painting, electronic component assembly, and other processes in automobile manufacturing. Research into mobility for robots focused mainly on multipedal walking robots, with four or more legs, and wheeled robots. Despite ongoing research into autonomous control of bipedal walking, it was thought to be difficult due to the complexity of dynamic balance control, so it was not a major focus of research.
Against this backdrop, Honda released a demonstration video of the P2 in December 1996, stunning the world’s robotics researchers and industry in the process.
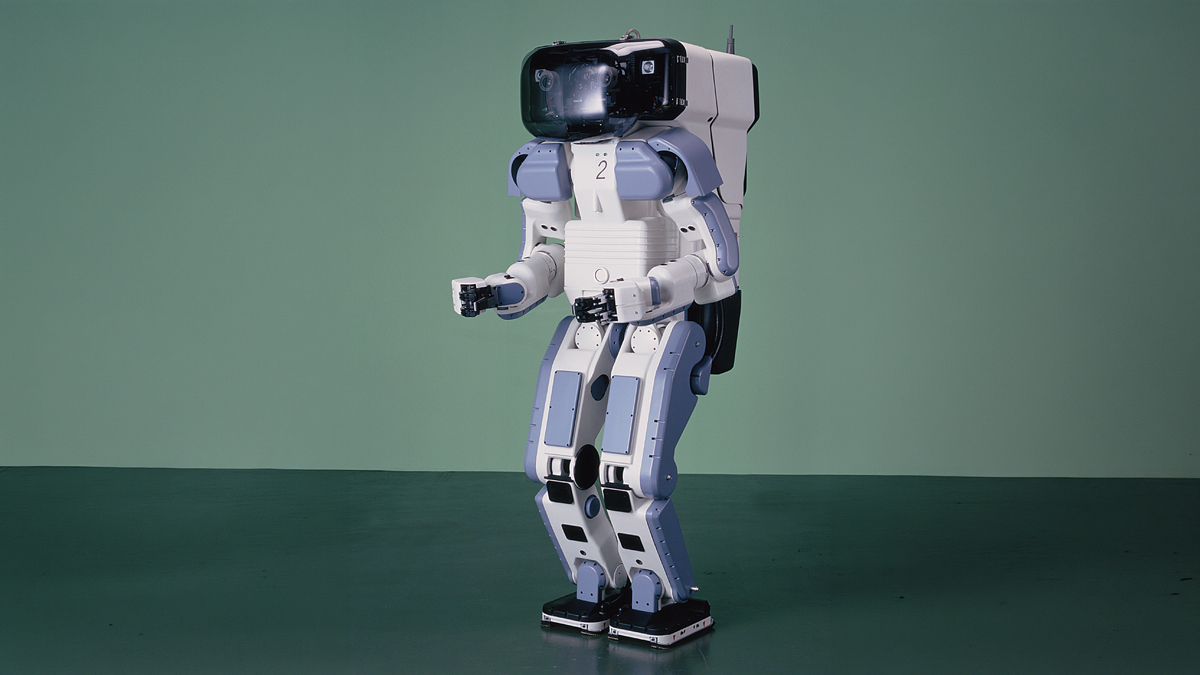
With built-in computer and power source, the P2 became the world’s first autonomous bipedal robot. Unlike the static walking (shuffling gait) style that was typical of bipedal robot technologies at the time, the P2 achieved natural, human-like gait, something that was previously thought to be impossible, thanks to Honda’s unique walking control technologies. It also ensured a stable posture through control technologies that could estimate various road surface conditions and external forces. Furthermore, real-time generation of leg movements enabled the P2 to walk on uneven or sloping ground and even to ascend and descend stairs.
In this way, the debut of the P2 represented an historic step for the field of robotics. It provided proof that humanoid robots were no longer just a dream, and inspired the world’s universities, private sector companies, and government institutions to accelerate efforts toward humanoid robot research. It also showed the enormous potential for robots to go beyond their role as industrial machines optimized for specific tasks and play a new role in society as partners to humans.
Autonomous Bipedal Walking Achieved Through Ongoing Development of Unique Technologies
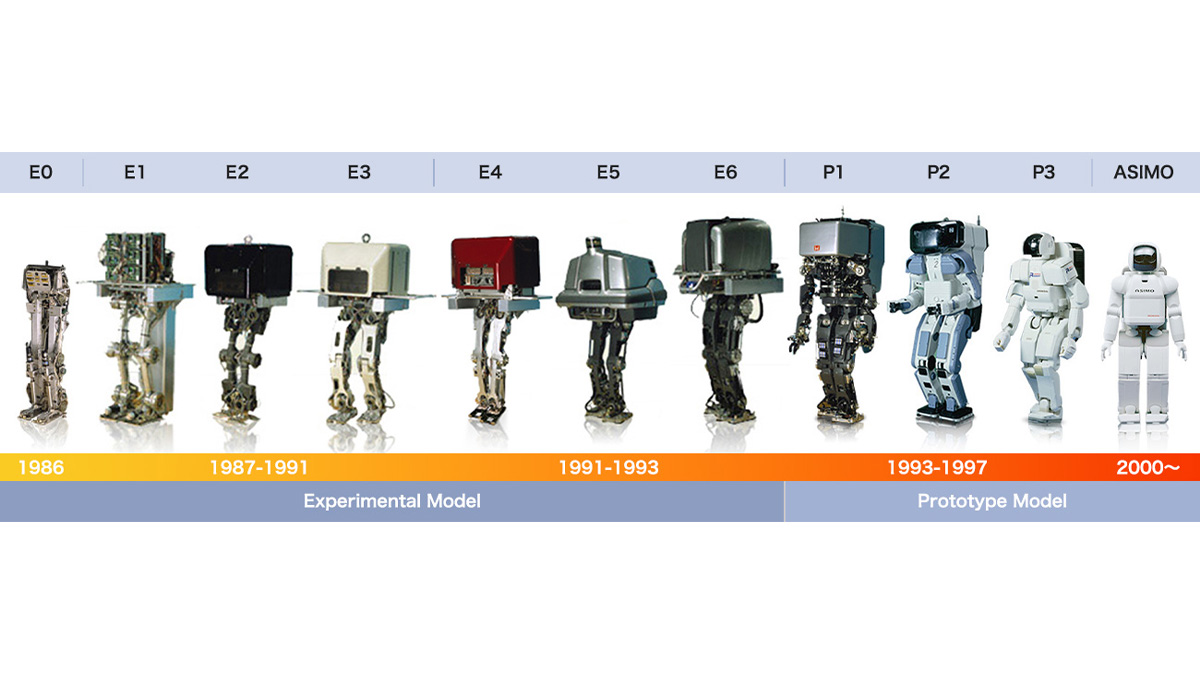
In 1986, Honda began its research into humanoid robots with a search for the ideal form robots should take in human society. From this, it decided that the robot had to function indoors, move freely within confined spaces, and ascend and descend stairs. Honda therefore settled on bipedal walking like that of humans as the most appropriate form of mobility. It proceeded to develop a series of innovative technologies toward its lofty goal of an “autonomous bipedal robot,” which was said to be difficult at the time.
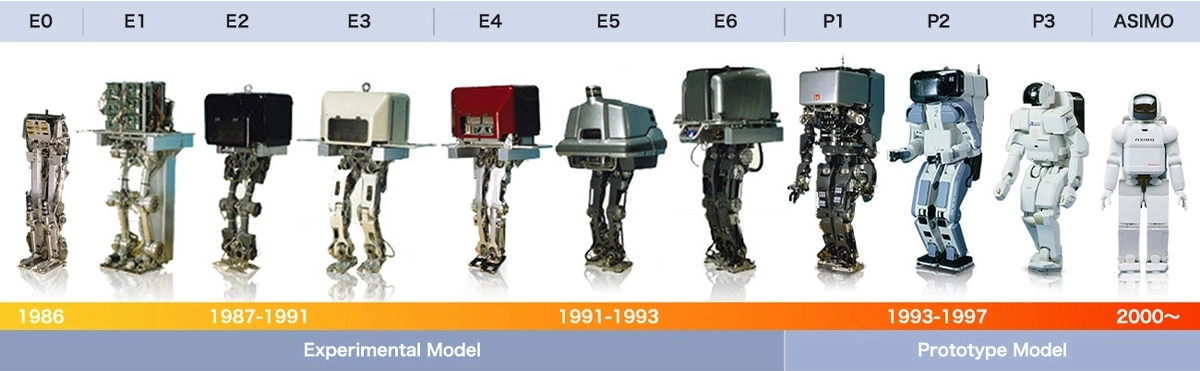
Human-like Dynamic Walking Technologies (1986–1991)
Development of bipedal walking technologies started with a slow static walking style, where the body’s center of gravity is always inside the sole of the foot when walking. To achieve a smooth dynamic walking style, like that of humans, Honda researched and analyzed all styles of walking, from humans to animals, and studied the positioning and movement of joints necessary for bipedal walking. With the E2 robot, it succeeded in achieving dynamic walking at a speed of 1.2 km/hour.
Establishing Walking Stabilization Control Technology (1991–1993)
To achieve even more stable walking, Honda developed three posture controls to address walking over uneven surfaces without falling over, not falling over even if pushed, and walking with stability even on stairs and sloping ground. This enabled it to create a walking mechanism and achieve stable walking even on stairs and sloping ground.
Evolving Into Humanoid Robots (1993–1997*2)
After establishing its bipedal walking technology, Honda began developing a humanoid robot by integrating the legs with a pair of arms. Its first prototype model, the P1, had an external power source and computer, but was able to perform actions such as turning switches on and off, gripping door handles, and gripping and carrying objects. Research was also conducted on coordinated arm and leg movements.
Next, Honda developed the P2 as the successor to the P1, with all the necessary devices built in so that it could walk freely, climb up and down stairs, push carts, and perform other actions wirelessly and automatically.
*2 The P2 was unveiled in 1996, with the P3 completed in 1997.
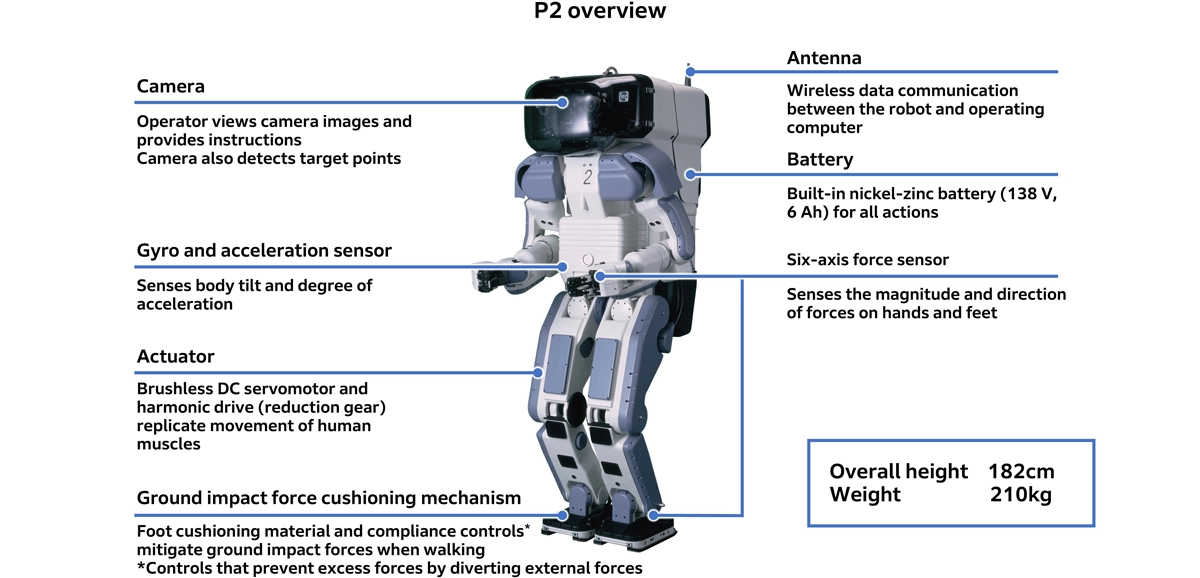
Basic Functions of the P2
●Climbing up and down stairs
The P2 can use a six-axis force sensor to estimate tread depth to continuously ascend or descend even long flights of stairs without missing its footing.
●Pushing carts
When the P2 attempts to push a cart forward at a constant speed but the cart is hampered for any reason, it can reduce strain by taking smaller steps.
●Operating remotely
Using a master arm, the P2 can tighten bolts and perform other tasks while sensing the reaction force on its hand.
Macroscopic Postural Stabilization Control That Dramatically Raised the Bar for Bipedal Walking
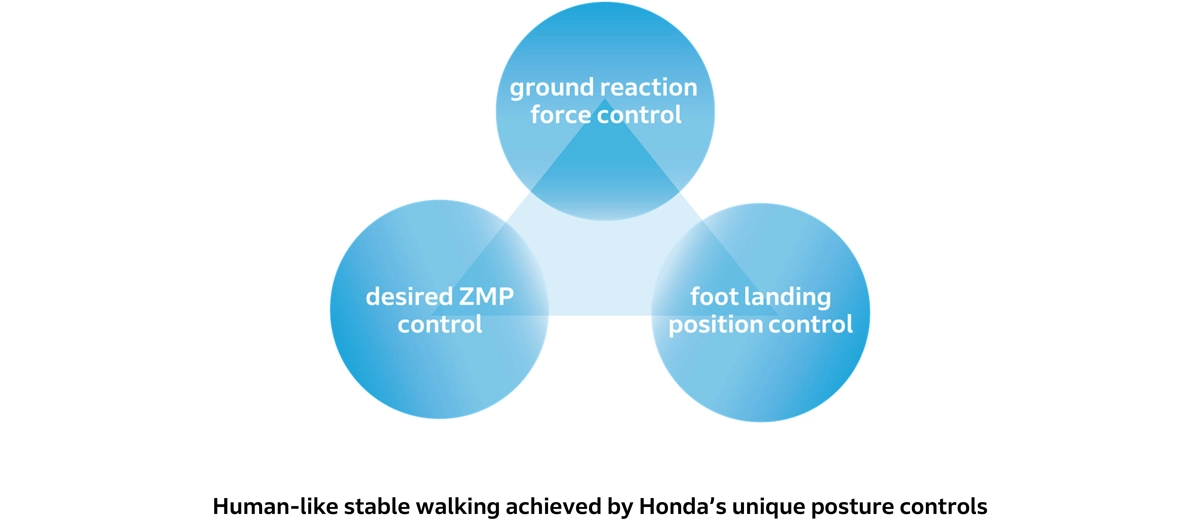
The P2 achieved stable, human-like walking. At the core of this capability was macroscopic postural stabilization control, which consisted of three controls: ground reaction force control, desired zero moment point (ZMP*3) control, and foot landing position control. First applied to the E6, this control system was further extended in the P2 to support coordinated movement with the arms and upper body.
*3 The zero moment point (ZMP) is the point at which the moment of total inertial force is zero.
Basic Mechanics of Robot Walking
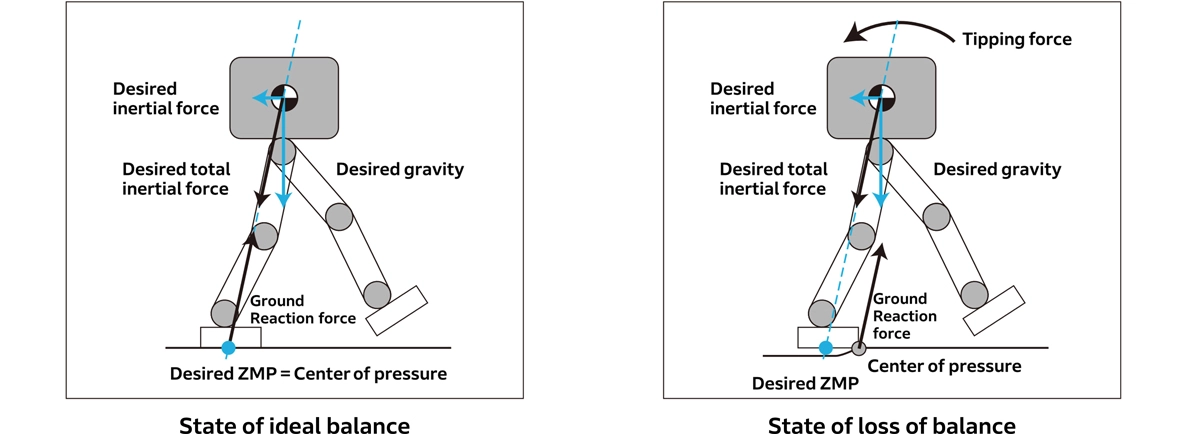
When robots are walking, they are subjected to the forces of gravity from the Earth and inertial forces from the acceleration and deceleration of walking. The point at which the axis of total inertial force intersects with the ground is called the zero moment point (ZMP), being the point where the moment of total inertial force is zero. On the other hand, a reactive force from the ground also acts on the robot’s foot when it contacts the ground, and this point of contact is called the “center of pressure.”
Basically, the robot generates an ideal walking pattern by computer, and then walks by moving its joints according to this pattern. The total inertial force associated with this ideal walking pattern is called the “desired total inertial force,” while the ZMP associated with the ideal walking pattern is called the “desired ZMP.”
When the axes of the desired total inertial force and the actual ground reaction force align, the robot is ideally balanced. In other words, the desired ZMP coincides with the actual center of pressure.
In contrast, the axes of desired total inertial force and actual ground reaction force are misaligned when walking on uneven surfaces, which causes the robot to lose balance and generates a tipping force. Because this tipping force is roughly proportional to the misalignment of desired ZMP and actual center of pressure, it becomes the major cause of loss of balance.
If a human is about to fall over, there is a series of actions that they naturally perform. They start by bracing themselves by pressing the soles of their feet down on the ground. For example, if they are about to fall forward, they brace themselves with their toes. If that does not work, they move their feet forward. The three posture controls that Honda developed replicate these human actions to achieve a stable posture for the robot.
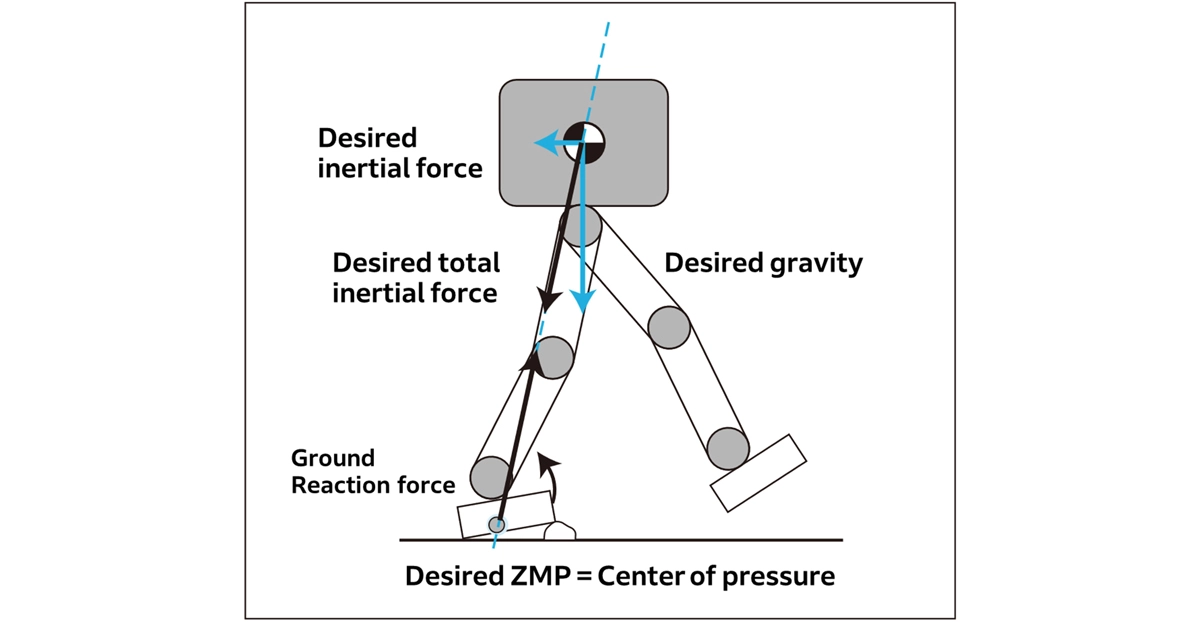
Ground Reaction Force Control: Bracing with the Soles of the Feet to Handle Uneven Ground
Ground reaction force control braces the robot with the soles of its feet if it is about to tip over. As an example, if the robot’s toes step on a stone, the actual center of pressure shifts toward the toes. The ground reaction force control then operates to lift the toes slightly and return the actual center of pressure to the desired ZMP. As another example, if the robot should tilt forward for any reason, the toes push down to brace and shift the actual center of pressure forward and generate a posture-restoring force. However, this posture-restoring force is limited because the actual center of pressure cannot go beyond the range of the sole contact area. This means that the robot will tip over if it tilts too far.
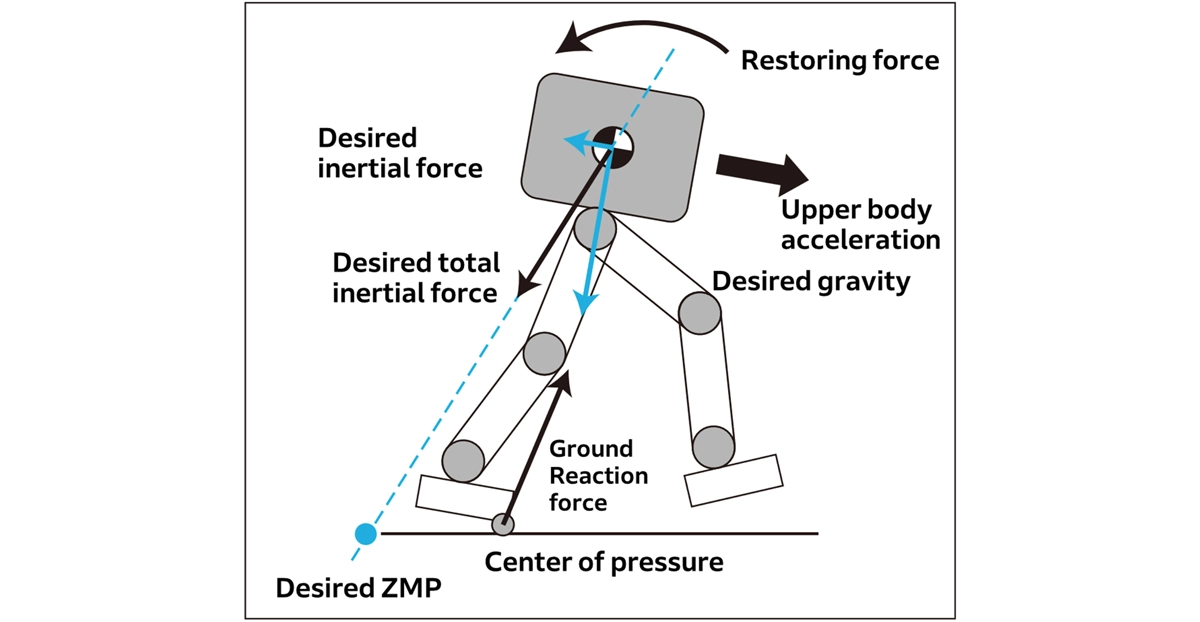
Desired ZMP Control: Maintaining Posture by Accelerating the Upper Body Into the Falling Direction When Bracing with the Soles of the Feet Is Insufficient
If the robot tilts too far, the desired ZMP control is activated to prevent tipping over. As explained above, a tipping force is generated when the desired ZMP and actual center of pressure are misaligned. On the other hand, desired ZMP control actively uses this tipping force to stabilize the robot.
Specifically, if the robot is about to fall forward, this control accelerates the upper body forward more forcefully than the ideal walking pattern. As a result, the desired ZMP shifts behind the actual center of pressure, which generates a rearward tipping force and restores the correct leaning posture.
This control uses inertial forces. It is the same principle that applies when standing on a train and being subjected to a rearward tipping force when the train accelerates.
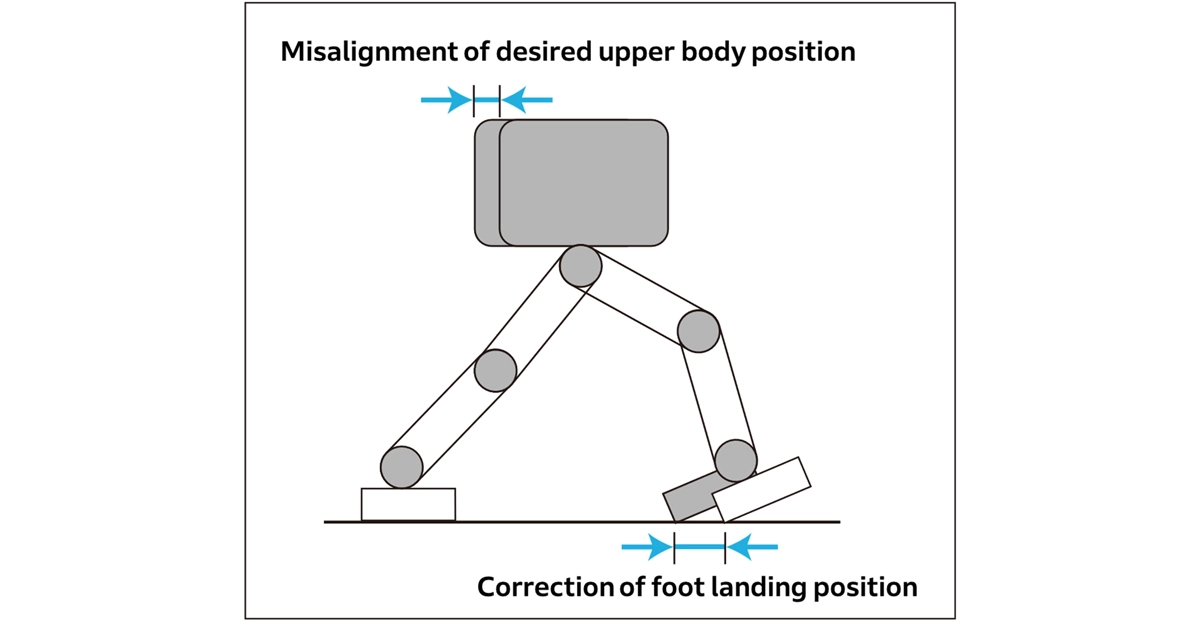
Foot Landing Position Control: Using Step Length to Adjust Upper Body Misalignment Resulting from Operation of Desired ZMP Control
When desired ZMP control operates, the desired upper body position is accelerated forward more forcefully. If the next foot is moved forward the usual step length (ideal step length) at this time, the feet will lag behind the upper body. Foot landing position control then operates to correct the step to an appropriate length and return the upper body and feet to the ideal relative positions.
ASIMO as the Culmination of Honda’s Humanoid Robots
The P2 established the basic structure for Honda’s robots (mobility based on a bipedal walking mechanism and tasks performed with a dual-arm mechanism) and the basic functions that they must perform (including climbing up and down stairs, pushing carts). In addition to this, Honda revised the materials used for parts and incorporated distributed controls to achieve a smaller, more lightweight package. This evolution of the prototype into the P3 created a robot that was closer in size to humans.
Honda continued to research and develop its robots with a focus on activities conducted in the human living environment. In 2000, it announced the ASIMO humanoid robot, which not only had an approachable design and suitable size and weight for helping humans as their partner, but also included predictive motion control to achieve a natural and smooth walking style that was even closer to the way humans walk.
ASIMO has continued to evolve over the years, with the 2002 version equipped with intelligent technologies able to use voice and image recognition to interpret the postures and gestures of humans and move independently in response. The 2005 version came with enhanced capabilities for working in actual environments like offices, and the ability to run. The 2007 version could perform collaborative tasks with multiple ASIMOs, and the 2011 version came with much greater autonomy, enhanced physical capabilities such as the ability to run at 9 km/hour, and high-performance, compact, multi-fingered hands that enabled it to perform tasks such as opening the lid of a water bottle and pouring liquid into a cup. The 2013 version also included risk avoidance functionality as part of ongoing efforts to enhance its athletic abilities.
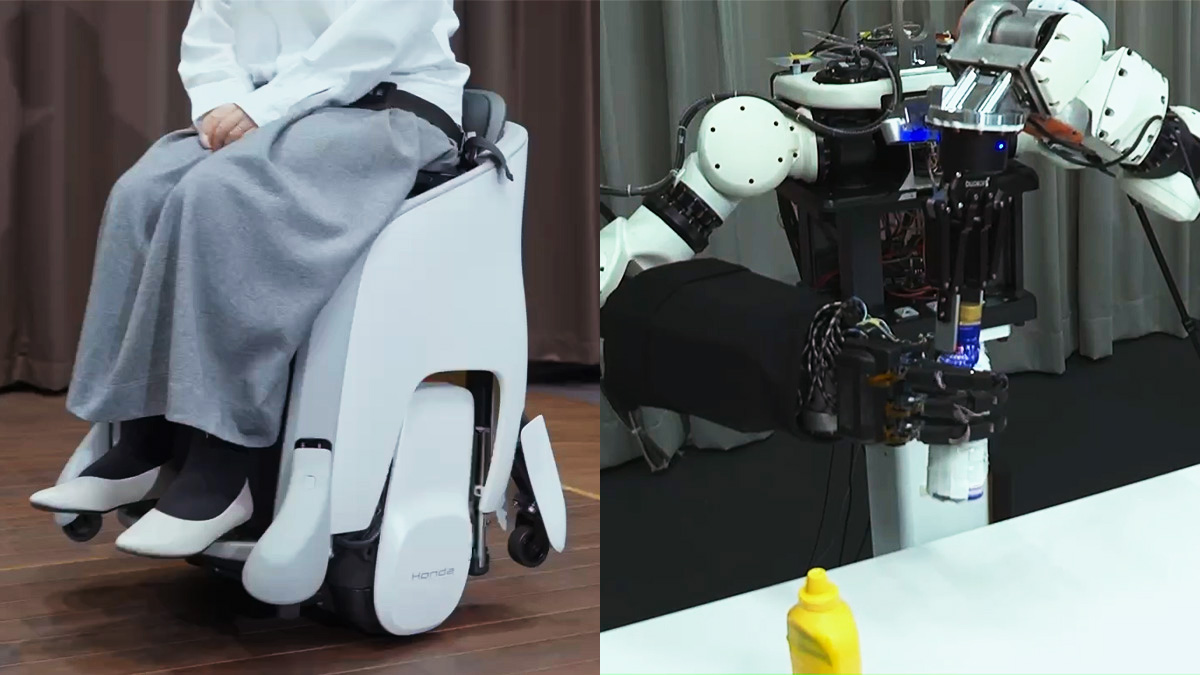
Honda Takes the Next Steps While Returning to the Fundamentals of “Helping People”
Leveraging the expertise it acquired through development of the P2, P3, and ASIMO, Honda is now taking the next steps in robotics technologies. However, rather than focusing on a single humanoid bipedal robot with diverse capabilities, it wants to develop a variety of robots with individual functions to help people at specific times and places. This is because it hopes to bring useful robots to the world faster to provide value sooner. In this way, it will create robots with specific functionality that will serve and support individuals in a personalized manner to help improve quality of life. Going forward, Honda will continue such efforts to research and develop robotics technologies that expand the potential of everyday life.