
Seeking a Motorcycle that Anyone Can Enjoy Riding With Ease
An overwhelming sense of freedom. It may be possible to summarize the appeals of a motorcycle in this short phrase. In addition to the freedom of mobility, the joy of driving on the road as one with the motorcycle gives rise to an expanded sense of awareness and happiness as if one has wings.
On the other hand, it is a fact that motorcycles, which are supported by two wheels, pose a risk of falling over in the event of improper operation. If it were possible for anyone to enjoy riding with ease and with no risk of falling, it would be possible to enjoy this sense of freedom with greater safety and less concern. We want more people to experience the joy of riding a motorcycle. It was with this vague feeling in mind that we began development*1 of Honda Riding Assist.
What Is Honda Riding Assist?
Honda unveiled the Honda Riding Assist self-standing motorcycle concept model at CES*2 2017 and received a total of three awards.*3 This concept model applied balance control technologies developed while researching humanoid robots, exemplified by ASIMO, enabling the motorcycle to remain upright when moving at low speeds and even when stationary, with or without a rider. This makes it easier to push a large motorcycle, and it was expected that it would become a key technology for drawing out other functions in the future. In addition, even if the rider slightly loses balance, the motorcycle itself maintains balance, reducing the risk of wobbling or falling while maneuvering.

Four years later, in 2021, Honda announced the second-generation Honda Riding Assist, which provides balance assistance that harmonizes with the rider’s steering intention through rider-machine cooperative control. When Honda exhibited this technology at the Automotive Engineering Exposition 2022 in Yokohama, it surprised many visitors and industry insiders.
How is Honda developing Honda Riding Assist, and in what direction does Honda seek to evolve it? Here, we present the progression of Honda Riding Assist and the future envisioned by Honda.
*1 Honda Riding Assist is a technology that is currently under development, and no decision has been made regarding mass production.
*2 CES is the world’s largest technology tradeshow, organized by the Consumer Technology Association (CTA).
*3 Honda Riding Assist received the Best Innovation and Best Automotive Technology awards of the Best of CES 2017, presented by Engadget, a U.S-based multi-language technology blog, and the Best of CES Editor’s Choice Award presented by Popular Mechanics, a U.S.-based technology magazine.
Balance Control Technology Acquired through Robot Development
The significance of ASIMO
ASIMO, a humanoid robot unveiled by Honda in 2000, attracted considerable attention for its friendly appearance and skillful autonomous walking ability. However, ASIMO was not developed simply to become a symbol of Honda Robotics. Based on a passion to create mobility that will generate new value, ASIMO was created and has developed as a robot that not only can walk autonomously, but can also make accurate decisions according to the conditions in its environment and act in ways aligned with people in order to be useful in human living spaces. The knowledge and technologies created through the development of ASIMO were applied to the Honda Walking Assist device (2015), UNI-CUB (2012) and UNI-ONE (2025) personal mobility devices, and more, thereby becoming the basis for creating new value.
The encounter of motorcycles with balance control technology
The Motorcycle R&D function focused its attention on the ASIMO balance control around the time that development of the U3-X (2009), a predecessor to the UNI-CUB, was completed. The R&D team believed that if the control technology of the U3-X, which enables travel in any direction, could be integrated with a motorcycle, which requires a certain degree of skill to ride well, it would be possible to create a new concept motorcycle that anyone could ride easily and enjoy. The U3-X was developed based on the balance control technology established during development of ASIMO, that is, the know-how regarding inverted pendulum control. This technology was perfectly suited to controlling the balance of a motorcycle.


From Robots to Motorcycles
The Similarity of Balance Control
An inverted pendulum is a pendulum whose center of gravity is higher than the fulcrum. The inverted pendulum is widely known in the fields of dynamics and control engineering as an unstable system and is used as foundational material in control research. A familiar example is balancing an umbrella on the palm of your hand without letting it fall—this is a form of inverted pendulum stabilization control. Both ASIMO and motorcycles are inverted pendulums in the sense that the center of gravity is higher than the fulcrum.
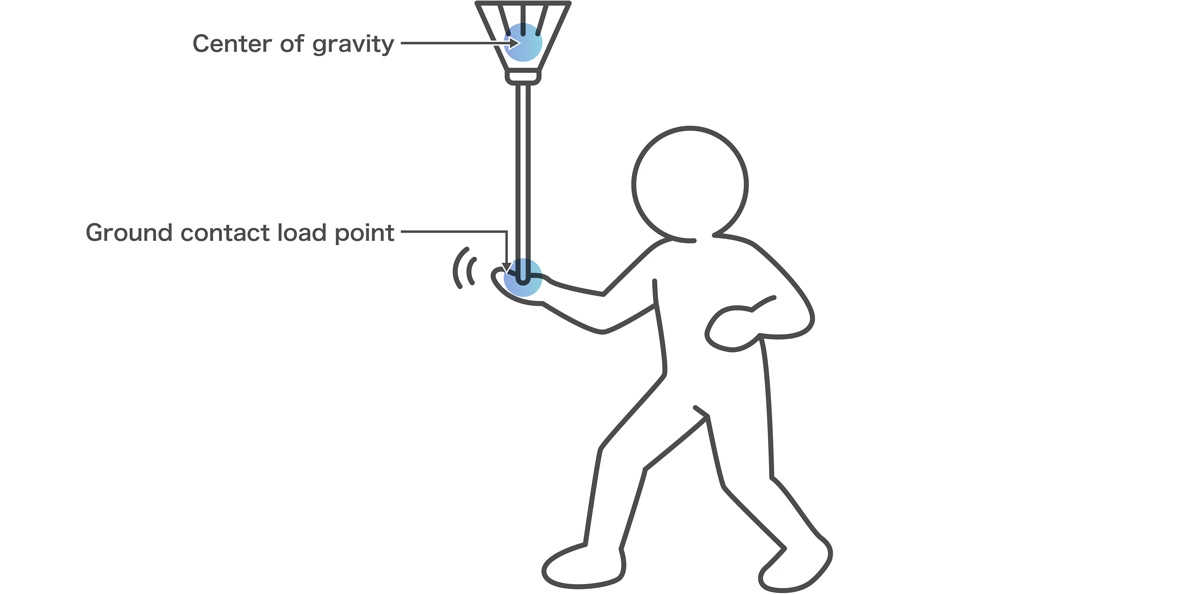
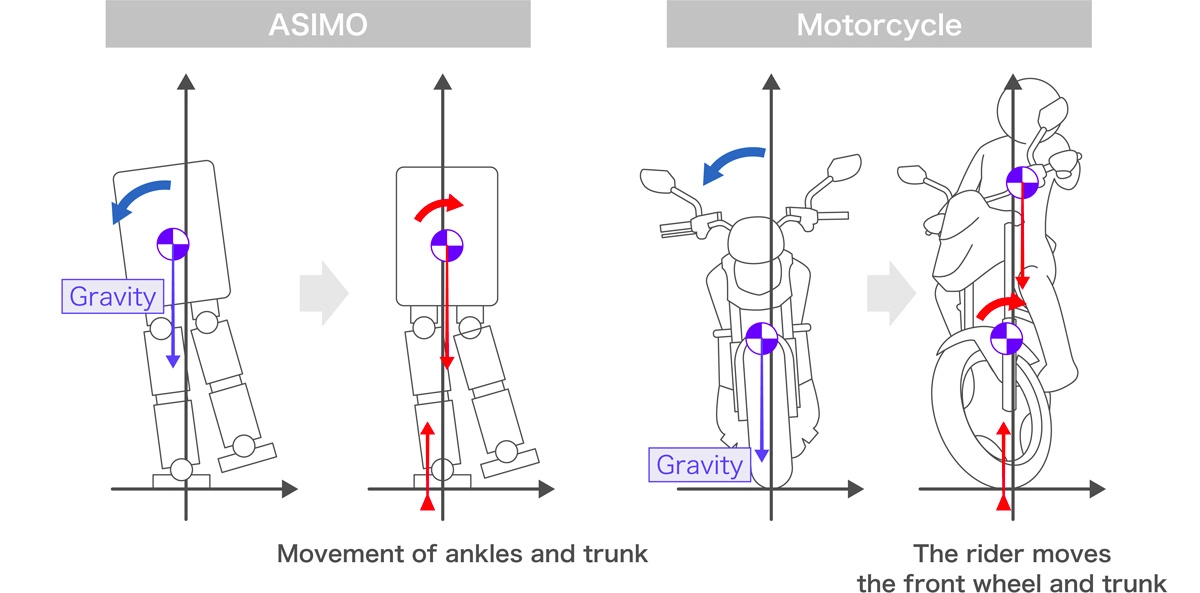
When ASIMO is about to lose balance while stationary, it moves its ankle to shift the ground contact point (the fulcrum) and simultaneously moves its trunk to shift to the center of gravity, maintaining its posture. Similarly, when a motorcycle is stationary, the rider turns the front wheel to shift the ground contact point and moves their trunk to avoid falling. In other words, balance is maintained using the same principle.
Clarification of motorcycle characteristics and technology targets
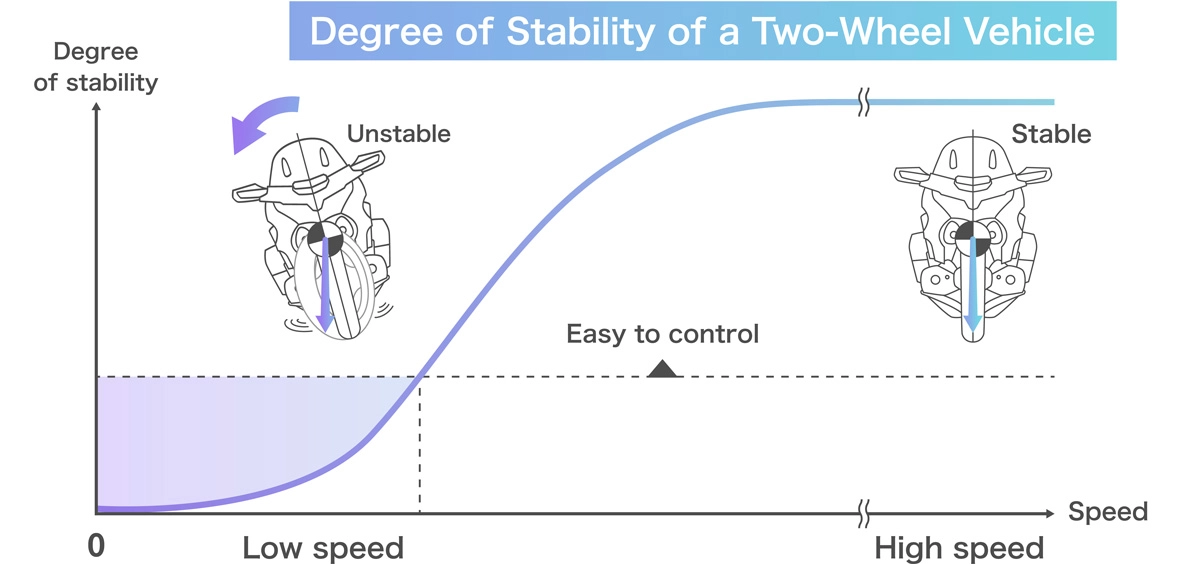
In contrast to this, a motorcycle is characterized by high stability when traveling at high speeds and reducing stability as the speed decreases. When stationary, the upright attitude cannot be maintained unless the rider supports the motorcycle with their feet. It was believed that the fear of falling while standing is a significant hurdle to commencing motorcycle riding and is a reason why people hesitate to switch to a larger motorcycle. To address this, the development of Honda Riding Assist was started to reduce the risk of falling while traveling at low speeds and when stationary.
Generation 1: Establishment of Autonomous Control Technology (2017)
Hypothesis Derivation
Both ASIMO and motorcycles maintain balance by changing the ground contact load point and posture. When this principle is broken down using the dynamics model of a motorcycle, a hypothesis can be derived that self-balancing at low speeds and when stationary can be achieved through control of the ground contact load point by steering the front wheel, control of lateral acceleration and centrifugal force, and movement of mass points (a mechanical concept with mass but no size) corresponding to the movement of the center of gravity of the rider and vehicle body. Steering the front wheel is not difficult if actuators are used. The challenge is deriving a theory of mass point movement and establishing it as technology. This is because it was not clear whether roll moment generated by mass point movement would be sufficient in the desired direction simply by steering the front wheel.
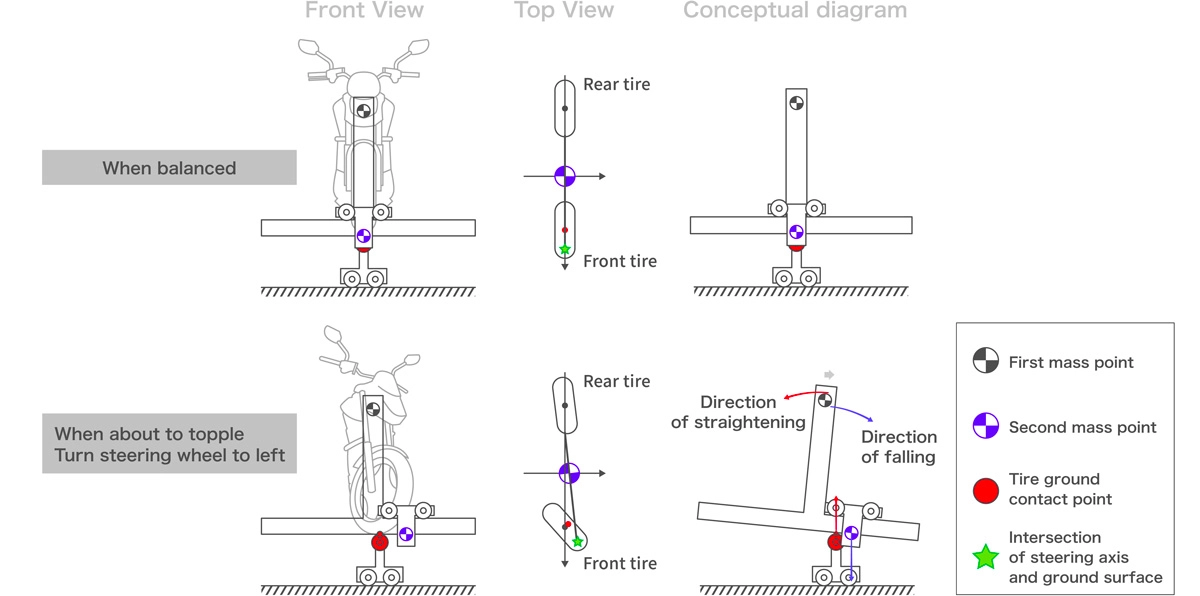
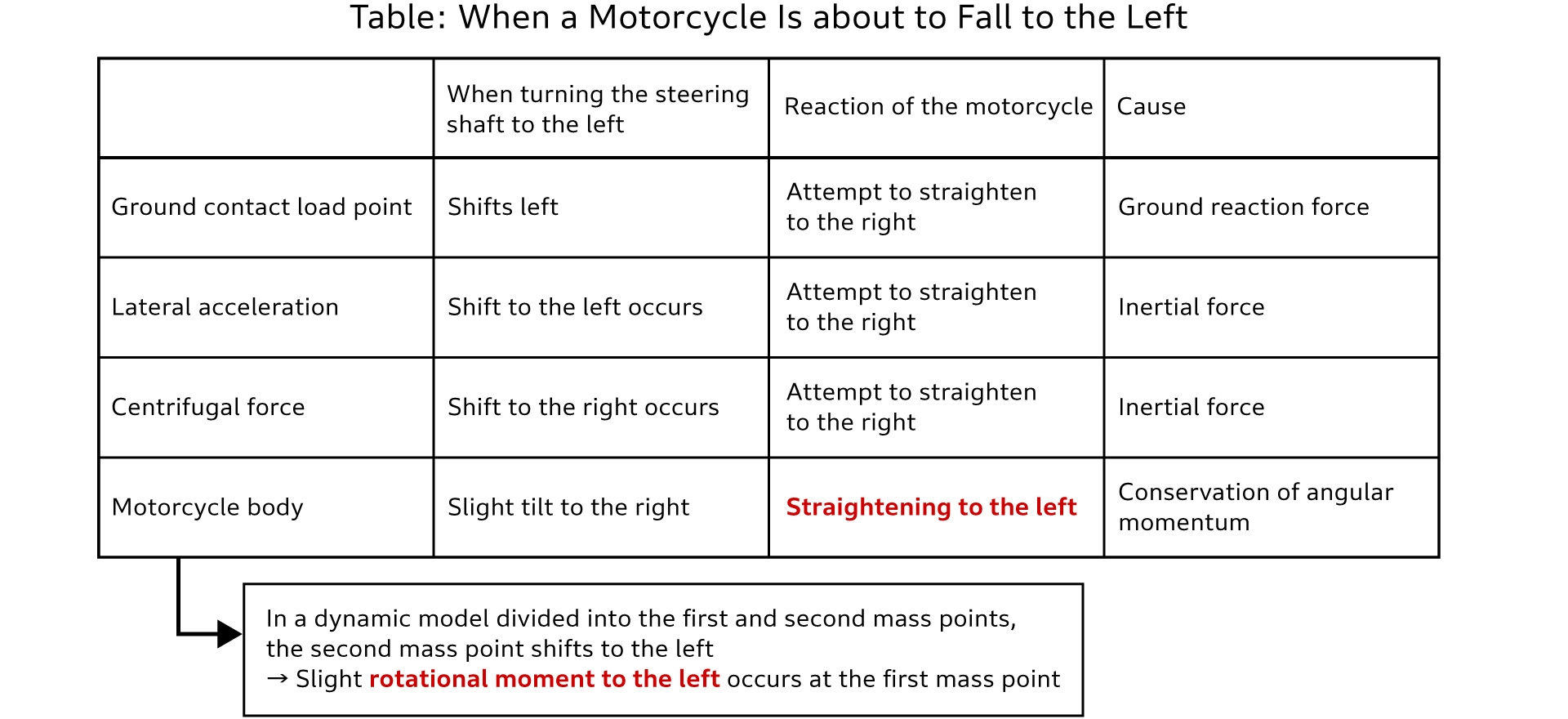
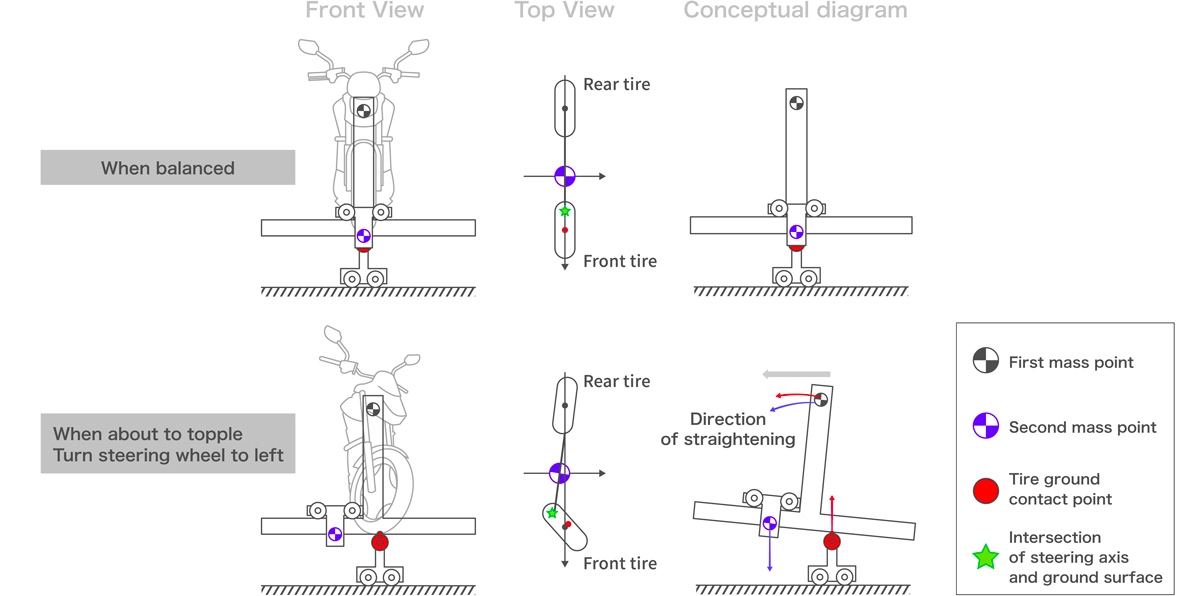
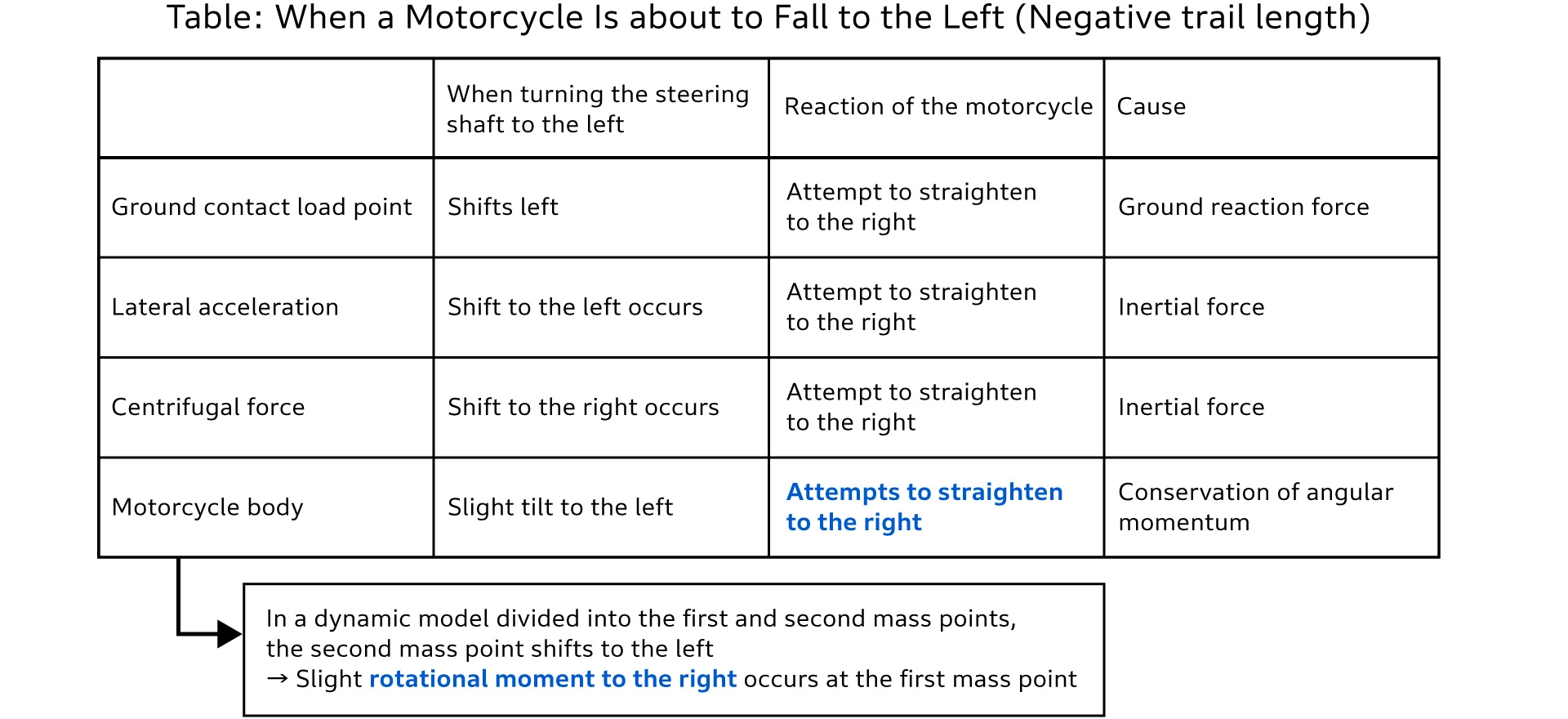
Equivalent two-mass point dynamics model that derives ideal mass point movement
During development, to derive the ideal status of mass point movement, we created and used for verification a dynamics model that divides the motorcycle’s mass point into a first mass point above the center of gravity (the center of gravity of an inverted pendulum,) and a second mass point on the ground (the fulcrum of an inverted pendulum,). For example, if the motorcycle is about to fall to the left, steering left to maintain balance causes the ground contact load point to move left and lateral acceleration to occur toward the left. This results in a restoring force that attempts to straighten the vehicle body toward the right. In addition, with a typical motorcycle structure, the vehicle body tilts minutely toward the right. Since the tilt is toward the right, there is a tendency to think that it generates a restoring force that straightens the vehicle body, but in fact, it is the opposite. Due to the law of conservation of angular momentum, a force that tries to push the motorcycle over operates even further. This is equivalent to the second mass point shifting to the left, and a slight rotational movement to the left is generated at the first mass point. The challenge is to oppose this. In other words, to generate a rotational movement to the right at the first mass point to generate a restoring force.
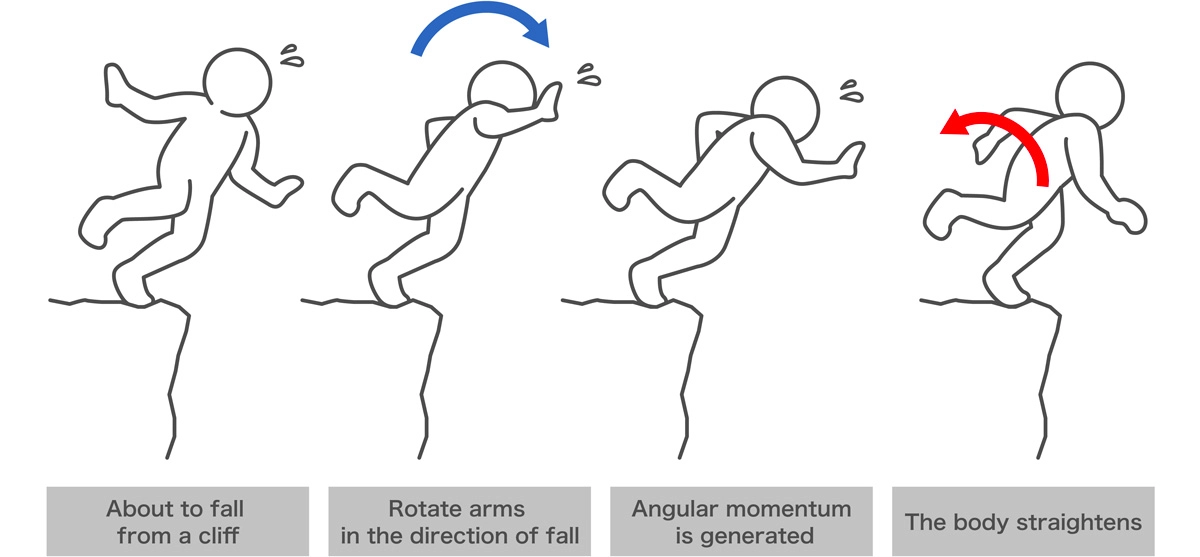
The law of conservation of angular momentum
The law of conservation of angular momentum is a physical law stating that angular momentum (physical quantity representing the momentum of rotation) remains constant unless acted upon by an external force. For example, when a person who is about to fall forward swings their arms in the direction of the fall, angular momentum is generated in the arms and by the law of conservation of angular momentum, the trunk generates angular momentum in the opposite direction, enabling the person to straighten.
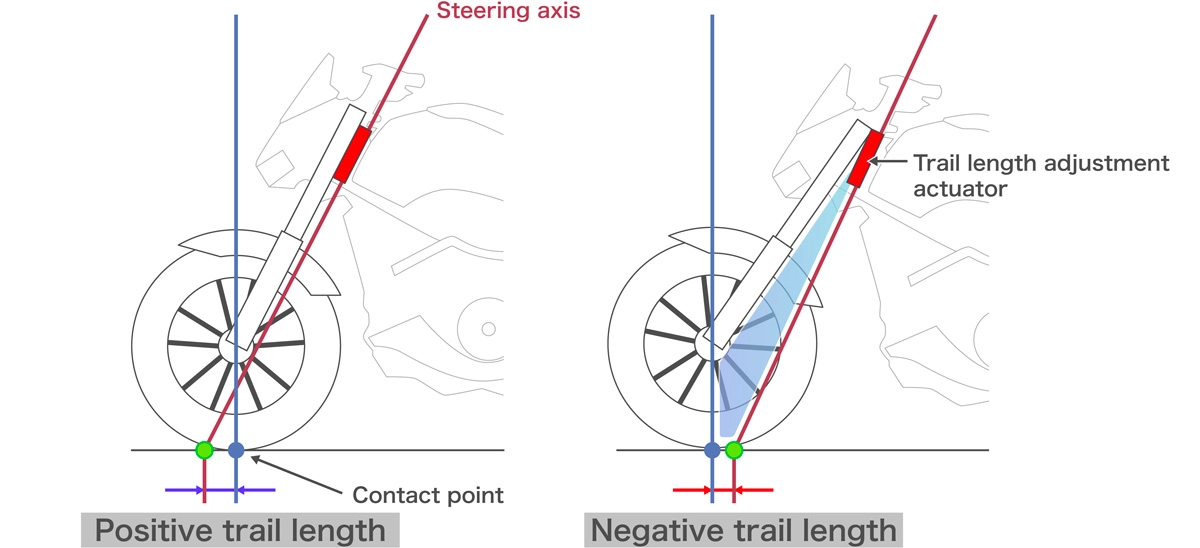
Variable trail technology that enables autonomous control
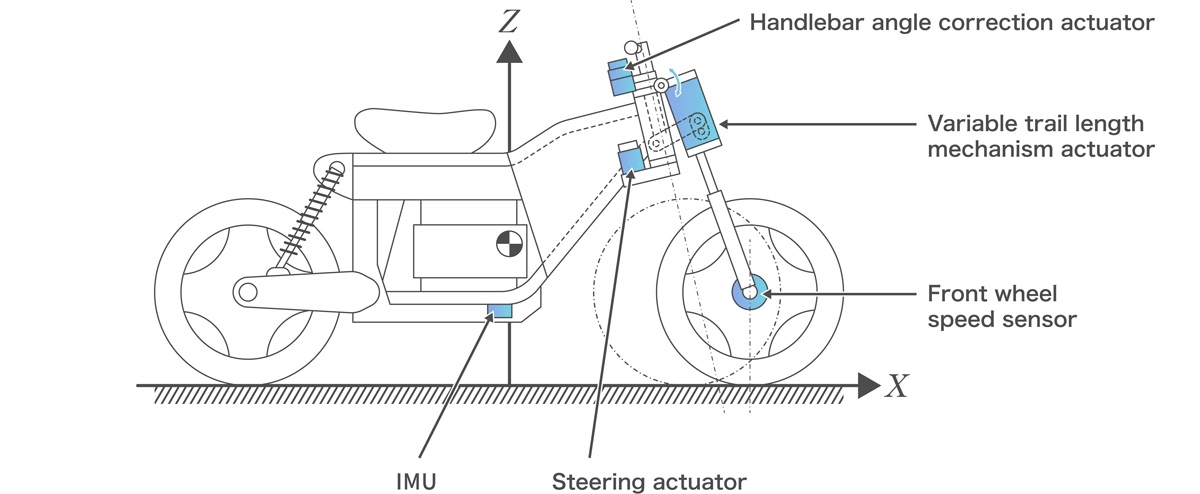
The challenge of autonomous control is that of the four elements—ground contact load points, lateral acceleration, centrifugal force, and mass points—only the polarity of movement of the second mass point is reversed. Accordingly, we focused on the relationship between the front wheel trail length and the mass point movement. Trail length is the distance between the tire ground contact point and the point where the steering center axis (which differs from the front fork) intersects with the road surface, and it greatly affects the straight-line stability of a motorcycle. In a typical motorcycle, since the steering center axis is forward of the tire ground contact point, the trail length is also a value forward of the tire contact point (referred to as positive trail length). It was discovered, however, that by setting the steering center axis behind the tire contact point (referred to as negative trail length), it is possible to reverse the polarity of the mass point movement. This makes it possible to use all three elements of autonomous control as restorative forces of balance, and for this reason, we decided to equip the system with an actuator to assist front wheel steering and another actuator to vary the trail length by adjusting the front fork angle.
Generation 1: System structure
An ECU appropriately controls each actuator based on information from an inertial measurement unit (IMU) that integrates an acceleration sensor and a gyro sensor as well as a steering angle sensor. At normal speeds, it maintains a positive trail length, and like a conventional motorcycle, provide self-stabilizing riding using centrifugal force and lateral acceleration, but at low speeds or when stationary, if centrifugal force is reduced, it switches to a negative trail length and performs finely-tuned steering control, enabling self-balancing, regardless of whether or not a rider is on the motorcycle.
Generation 2: Combined with the Joy of Riding (2021)
Issues with Generation 1
Although a “self-standing motorcycle” was completed, there were still major issues with Generation 1. It was confirmed that leaving all control to front wheel steering caused a feeling of discomfort on the part of the rider. Also, there were instances where control was contrary to the rider’s intentions. Specifically, there were some instances of behavior where the motorcycle attempted to straighten itself even though the rider leaned the vehicle body to make a turn. This was not a motorcycle that “makes it possible for anyone to enjoy riding with ease.”
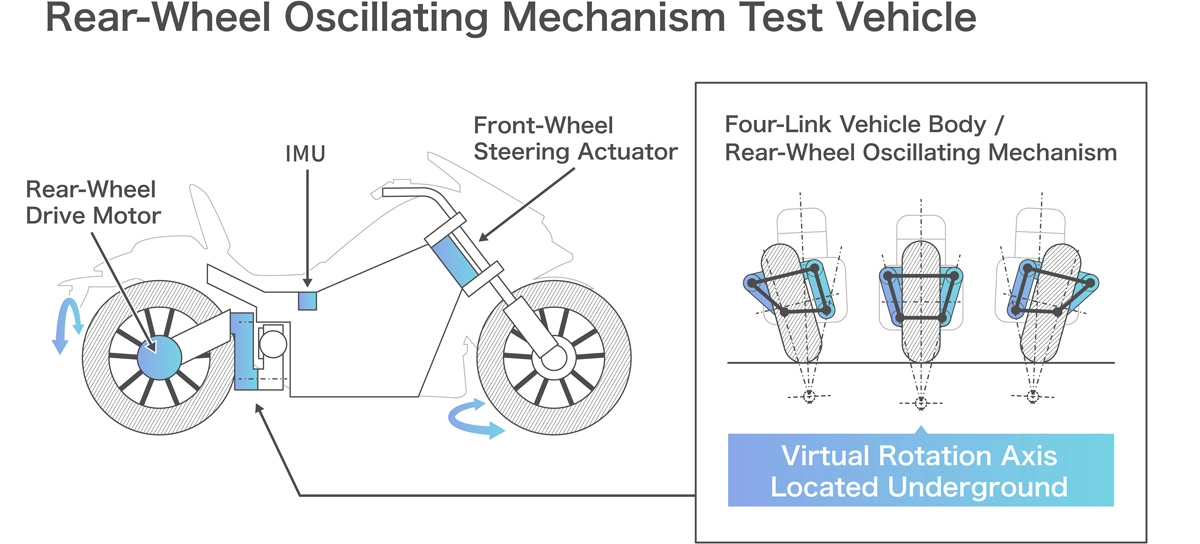
New Method for Mass Point Movement Control: A Four-Link Oscillating Mechanism
The fundamental principles for control through steering and mass point movement were already in hand. Therefore, to reduce the rider’s feeling of discomfort, we decided to leave steering primarily to the rider and pursue technology that could shift the mass points using a technique other than a variable trail length. While testing various ideas, such as a method that rotates the central axis of the frame, a method that rotates another control axis parallel to the steering axis, and a method that rotates a vertical control axis intersecting with the steering axis, we realized a certain point. That is, a rider feels a sense of discomfort when there is movement between the rider and the handlebars that is different from the steering input, but riders are extremely tolerant of movement below the seat. To address this, we developed a new four-link trapezoidal mechanism whose upper side is longer than the lower side. When placed between the frame and the rear wheel, this mechanism enables the frame and rear wheel to oscillate by means of an actuator. We demonstrated that shifting the rear wheel ground contact load point produces a mass point movement effect equivalent to that achieved with the Generation 1 structure by switching to a negative trail length. By doing this, we established a new method of mass point movement control in place of the variable front wheel trail length technology, eliminating rider’s discomfort.
Cooperation with the rider
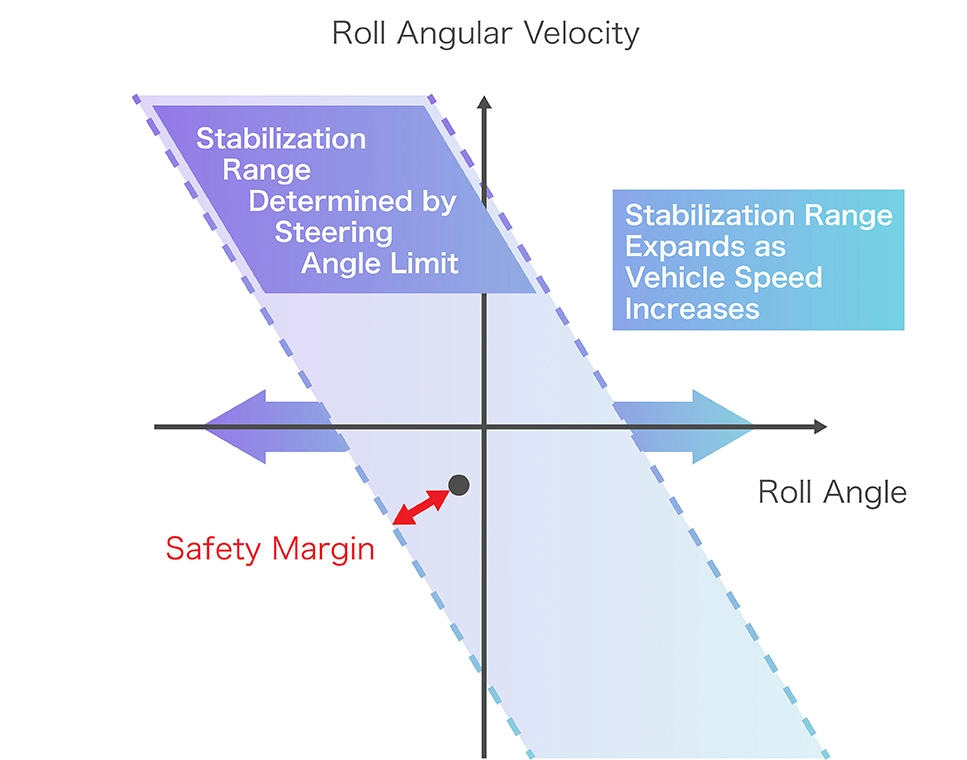
On the other hand, the issue of the motorcycle attempting to straighten itself even though the rider has leaned the frame to make a turn was resolved by using a risk of falling over. This is a Honda-proprietary index developed from the creation of ASIMO that enables a theoretical calculation of falling over risk based on roll conditions (roll angle and roll rate). Based on this, we derive a range in which stabilization is possible, and by applying control only when the risk of falling over is high, we achieved ideal cooperative control that mitigates falling over risk while respecting the rider’s freedom of maneuvering.
Risk of Falling Over Index Graph
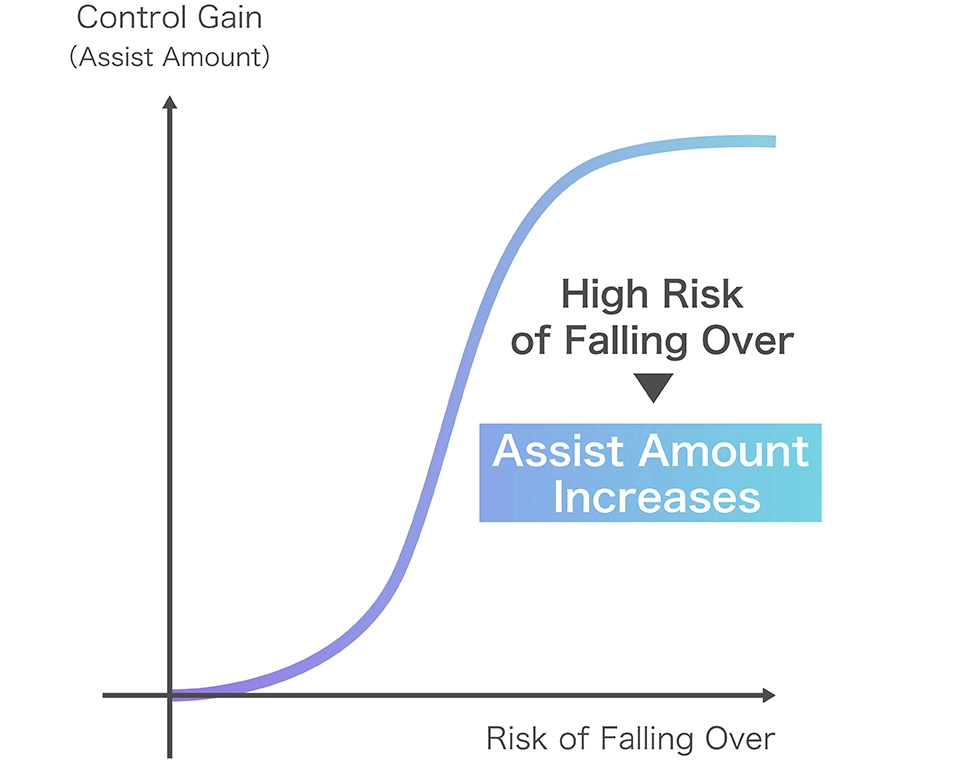
Image of Evaluating the Risk of Falling Over from Roll Conditions
Generation 2: System structure
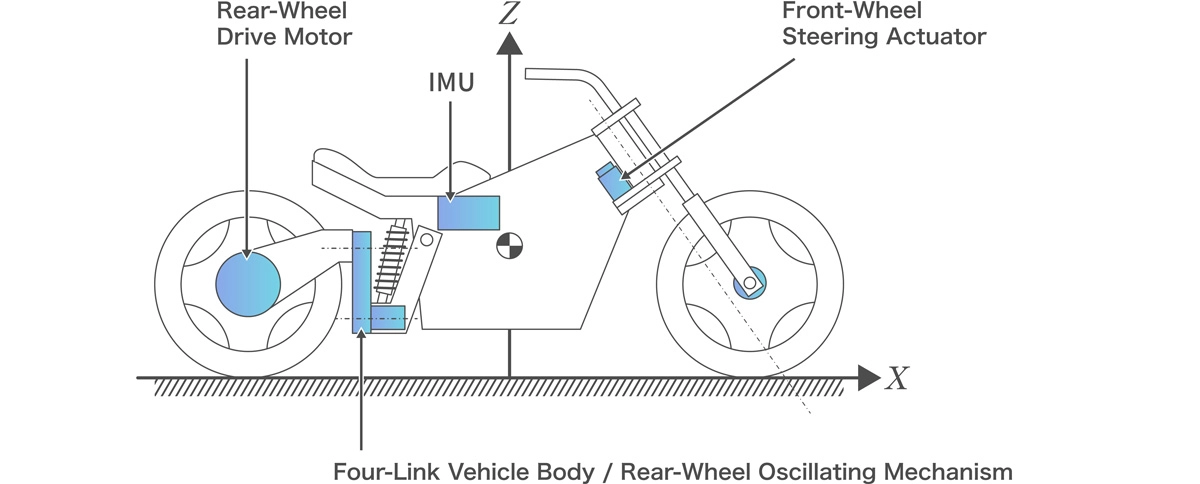
The IMU, steering angle sensor and ECU were carried over from Generation 1, and the front wheel variable trail length mechanism was eliminated, leaving only steering control. The four-link oscillating mechanism, introduced to replace the variable trail length mechanism, does not operate in normal speed range, but rather, generates restoring force by oscillating the frame and rear wheel only when there is a high risk of falling over during low-speed riding or when stationary.
Direction of EVOLUTION
The objective of Honda Riding Assist is to create a “motorcycle that anyone can enjoy riding with ease.” Although Generation 2 successfully reduces the risk of falling over over when riding at low speeds or when stationary, this is only the beginning of the technology needed to achieve this objective. Honda will continue to advance Honda Riding Assist into a system that not only covers all speed ranges, including high speeds, but also envisions applications for the Honda SENSING advanced rider assistance system and autonomous driving technologies so that the overwhelming sense of freedom that motorcycles provide can be enjoyed more safely and more easily.
At the same time, we will evolve collaborative control to ensure that the behavior of Honda Riding Assist is in full alignment with the rider’s intentions. When doing this, what will likely be important is being highly in tune with the rider’s intentions. Even at the current stage, it is possible to sense riding conditions and rider inputs, and it is also possible to anticipate to some degree the rider’s intent to shift their body weight. Nonetheless, for example, the know-how has not yet matured to the point of accurately determining whether a slight tilt of the vehicle is due to the rider’s intention to turn or due to an external disturbance such as a bump on the road. To raise rider cooperation to an even higher dimension, it will likely be necessary to go as far as understanding the rider’s state of mind, including whether they are consciously or unconsciously maneuvering the motorcycle.
From the beginning, Honda has delivered technologies and products that benefit people by understanding people. Honda Riding Assist similarly seeks to create a “motorcycle that anyone can enjoy riding with ease” by gaining an even deeper understanding of riders.



