
To serve people worldwide with the “joy of expanding their life’s potential,” Honda has been striving to lead the advancement of mobility and enable people everywhere in the world to improve their daily lives, while also aiming to realize a collision-free society.
As one of the initiatives toward our goals, Honda has been working on micro-mobility technologies powered by CI (Cooperative Intelligence) that utilize Honda CI, Honda’s original AI that enables mutual understanding between machines and people.
We are striving to make the mobility of people and things ubiquitous (“whenever, wherever, to any destinations”), collision-free and stress-free to realize a society where people experience the joy and freedom of mobility.
Honda CI Micro-mobility
Mutual understanding and cooperation between machines and people
To realize collision-free and stress-free mobility, we need micro-mobility machines which achieve mutual understanding with people and cooperate with the surrounding environment to support the freedom of mobility for people and things.
Envisioning people’s mobility-related desires and challenges in 2030 and beyond
In the future society with a declining birthrate, aging population and people living increasingly busy lives, we anticipate that the attitude people have toward “mobility” will be different from what we know today.
In an aged society, there will be greater concerns about traffic accidents and difficulties the elderly will face while trying to go places, including the inevitable use of stairs in urban areas. All of this will become an issue in society. The low birthrate and aging population will cause a labor shortage in society and, as a result, people will be busier and wish for more time efficient mobility. At the same time, although members of “Generation Z (Gen-Z)” tend to have a strong desire to go out and experience things in person, many of them are also anxious about driving.
New technologies are required to meet such a wide variety of needs and desires and realize freedom of mobility for people. These new technologies need to solve issues that cannot be adequately resolved with existing means such as the data utilization, fully automated driving and robotic services.
Demands and challenges mobility is expected to face in 2030 and beyond

Developing Honda CI, an original AI that enables mutual understanding between machines and people, to expand the joy and freedom of mobility
At Honda, we believe that new value-added mobility products will be necessary to resolve our daily mobility issues in the near future. What we need are mobility machines that enable the user to enjoy safety and freedom of mobility by understanding the intentions of the user, recognizing the surrounding road environment without relying on high-definition maps and cooperating with other road users so that they can give way to and/or negotiate with each other.
To realize such mobility machines, Honda has developed Honda CI (Cooperative Intelligence), an advanced AI technology that recognizes the surrounding environment, communicates with people, understands people’s intentions and situations, and makes decisions on its own. We are now conducting research on the Honda CI Micro-mobility machines which utilize Honda CI to realize the freedom of mobility.

To accommodate the growing need for mobility, Honda is currently conducting research on two Honda CI Micro-mobility machines: CiKoMa* ride-in vehicle and WaPOCHI* robot that follows the user while they are walking.
*CiKoMa: “Cooperative Intelligent KOMA” (“Koma” means “young horse” in Japanese.)
WaPOCHI: “Walking support POCHI” (The name represents an image of a robot that provides walking support while coming alongside the user, like a pet.)
“POCHI” stands for Robotic Porter Obtaining Cooperative Human-machine-Interface.
Note: POCHI is also a common name for pet dogs in Japan.

The CiKoMa is a ride-in micro-mobility vehicle designed for one or multiple passenger(s). Because CiKoMa is basically a self-driving vehicle, even people who are not comfortable driving can enjoy mobility safely with peace of mind. Although CiKoMa drives autonomously, Honda is also working on research and development to enable the user to select CiKoMa’s pathway freely by instructing CiKoMa to turn right/left using a joystick.
CiKoMa is being developed as a vehicle that the user can hail and get on whenever they need and get off wherever they prefer. Leveraging this ubiquitous nature of CiKoMa, Honda is striving to popularize it as a casual means of transportation for business, sightseeing, or a quick ride around town.


The WaPOCHI is a micro-mobility robot that recognizes and walks together with the user, capable of both following close behind the user and leading the way for the user. WaPOCHI can carry bags or other small items so that the user can enjoy walking without carrying anything.
The function to follow the user makes walking easier for a variety of people, and the function to lead the way will enable the user to walk through crowded places without bumping into other people. With these functions, WaPOCHI is expected to be able to support walking for all users including the elderly.

Overview of proof-of-concept demonstration being conducted in Joso City, Ibaraki Prefecture in Japan
CiKoMa provides visitors with an opportunity to experience autonomous driving from the Michi-no-eki Joso (roadside station) to the Granberry Daichi (tourist farm) within Agri-science Valley Joso. Also, there is a staff member riding along to ensure the safety of the visitor.
WaPOCHI provides strawberry picking customers at the Granberry Daichi with an opportunity to experience walking with WaPOCHI, which will be following and/or leading the way for the user, within the outdoor facility of the farm.
CiKoMa technology
Map-less cooperative driving technology:
Drive while “looking” at the road like people do
In contrast to existing self-driving vehicles which use high-definition maps and drive to a preset destination, Honda CI-powered mobility machines can perform map-less autonomous driving, which means that, without using high-definition maps, they “look” at the road and understand the structures, just like human drivers do, and decide which pathways to take.
This map-less driving enables the users not only to go directly to pre-set destinations but also to enjoy going places with more freedom and flexibility while still benefiting from the autonomous driving of Honda CI-powered mobility.
A ride-in micro-mobility vehicle which is capable of driving freely on roadways and even on public open space*, without relying on maps
* An area accessible from roadways or sidewalks and open to the public for free passage or use, such as areas around buildings and public parks.
Fully automated vehicles which take the passengers to predetermined destinations do not allow passengers to enjoy freedom of mobility such as changing directions into a small alley out of curiosity. Typical automated driving vehicles rely on high-definition maps, and it is cost-prohibitive and impractical to create maps that include everything such as narrow alleys set back from main roads and pathways within the premises of certain facilities. Therefore, to realize a self-driving vehicle which allows the user to enjoy freedom of mobility, we need to create a vehicle that drives safely while recognizing road structures by “looking” at them just like people do, without relying on maps.
Such a vehicle must also understand lanes, intersections and other road structures to make right/left turns appropriately and safely in response to instructions given by the user.
Moreover, it is also essential for the vehicle to predict the behavior of other road users in the vicinity such as pedestrians and bicycle riders and drive safely while avoiding potential risks.
Furthermore, to drive freely on public open space where there are no road surface markings and curbs, the vehicle must have a function to recognize and avoid obstacles and drive while generating a map with an optimal route selected while also taking user’s comfort into consideration.
■ CiKoMa needs different functions for driving on roadways and on public open spaces
Because recognition targets, vehicle speeds, and traffic rules differ greatly between driving on roadways and on public open spaces, the map-less cooperative driving functions are configured separately for each scene.

Recognition on the roadway: Map-less cooperative driving control


CiKoMa recognizes lanes and drives autonomously along the road. 
The user tilts the joystick to instruct CiKoMa to make a right/left turn, and CiKoMa makes the turn automatically.
■ Flow of control for the map-less cooperative driving on the roadway
The system is capable of real-time recognition of not only visible road surface markings such as lane markings and stop lines but also road structures such as lanes that people presume while navigating. Unlike maps, the road structures recognized by the system change every moment. The system generates action plans which accommodate such changes and controls the vehicle to make right/left turns with a stable steering angle.

Recognition on public open space: Trajectory control

■ Flow of control for map-less cooperative driving on public open space
Three-dimensional point clouds are generated from the parallax of the two lenses of a stereo camera, and the grid-based analysis of such point clouds enables the recognition of 3D objects which could be possible obstacles to CiKoMa.
If the height of the obstacle exceeds a predetermined value, the system determines it as an impassable area and finds passable areas quickly. Then, the system generates a rough outline of the shortest route to the target spot on a real-time basis, and CiKoMa moves along that route in a trajectory that smoothly avoids obstacles.

User intention understanding and communication technology:
Understand human words and gestures and carry out conversation through dialogues
If a mobility product and its user can communicate and understand each other's intentions, and if the mobility product can think and make suggestions on its own, it will be possible for the mobility product to follow the user’s ambiguous instructions. This requires technology that enables the mobility product to understand human words and gestures, and its surroundings.
The “user intention understanding and communication technology” which realizes natural human-like interactions
Let’s imagine the future where self-driving mobility products are widespread and a situation occurs where the user wants to inform the mobility product of a change in the meeting point and/or the destination.
If the user has to use a smartphone app and type in the new location to notify the mobility product, it would not only be inconvenient, but in some cases, too slow to deal with last-minute changes.
If the mobility product is capable of understanding human words and gestures, just as people communicate with each other, the user and the mobility product can smoothly communicate their intentions. With Honda CI, we are taking on challenges to realize “mobility at the will of the user,” which will not ask human users to accommodate the needs of mobility products but enjoy mobility based on mutual understanding between machines and people.
1) Dialogue-based user identification
CiKoMa first moves to the approximate location of the user based on GPS information, and then searches for the user by applying image recognition using images captured by its cameras. CiKoMa identifies the user by understanding gestures such as handwaving. If there are multiple people in the vicinity, CiKoMa determines the characteristic differences among the candidates and automatically calculates which questions about their characteristics will help in identifying the user in the shortest amount of time. Then CiKoMa identifies the user by asking the fewest questions possible.
Images captured by CiKoMa cameras

2) Integrated understanding of words and gestures
In addition to words, people often indicate the direction they want to go by pointing their finger in that direction. For example, if there are multiple vending machines and the user points to one of them and says, "Go to the vending machine over there," CiKoMa first extracts the keyword "vending machine" from the instruction. CiKoMa then uses its image recognition function to gain three-dimensional understanding of the pointing gesture and estimates the direction the user is intending to point. By understanding this information in an integrated manner, CiKoMa smoothly identifies the user's intended destination, just as if the user were interacting with another human being.
Images captured by CiKoMa cameras

3) Proposing a stopping point while taking the surrounding conditions into consideration
The point indicated by the user is not necessarily the appropriate stopping point for CiKoMa. For example, even if the user instructs CiKoMa to "come and stop near that car," CiKoMa makes its own decision that the area around the car is dangerous based on its pre-registered knowledge of rules, manners, and danger levels. CiKoMa then explains the reason why the stopping point instructed by the user is not appropriate and proposes a new spot by saying, "It seems dangerous. Is it OK to stop near the cone?"
Images captured by CiKoMa cameras

【Video】Demonstration testing of CiKoMa
Changing the testing venue from research facilities to a real-world environment, such as an area shared with pedestrians and bicycle riders, we began proof-of-concept demonstration of a CiKoMa vehicle equipped with technologies tailored to each of the testing locations.
WaPOCHI technology
Technology to remember and identify distinctive characteristics of the user
Remembering the appearance of the user
WaPOCHI is a micro-mobility robot that recognizes and moves with the user while carrying baggage. It aims to eliminate the user’s burden of carrying things and enable more comfortable walking. WaPOCHI recognizes and memorizes the user’s appearance features such as the color of their clothing, hair color, height and physique using images captured by its cameras.
For recognition, WaPOCHI uses multiple cameras mounted on the front/back, right/left sides of the upper part of its body. By capturing a 360-degree three-dimensional view of its surroundings, WaPOCHI uses AI to extract and track the user’s distinctive characteristics. Even if WaPOCHI loses sight of the user for a short period of time when the user is in the shadows of other pedestrians or objects, it is designed to identify the user again based on memorized characteristics once the user comes back to its view and resume tracking.
Honda will continue its research to enable WaPOCHI to move smoother by improving its following and leading behavior in the crowd.

■ Image of how WaPOCHI memorizes and identifies the user
In addition to the user's location information, WaPOCHI uses appearance features captured by its cameras to identify the user for continuous following/leading.
WaPOCHI identifies the user by scanning pedestrians who were in the vicinity of the last spot the user was recognized and whose characteristics captured by the cameras are most similar to the memorized characteristics of the user.

Technology for following/leading the user
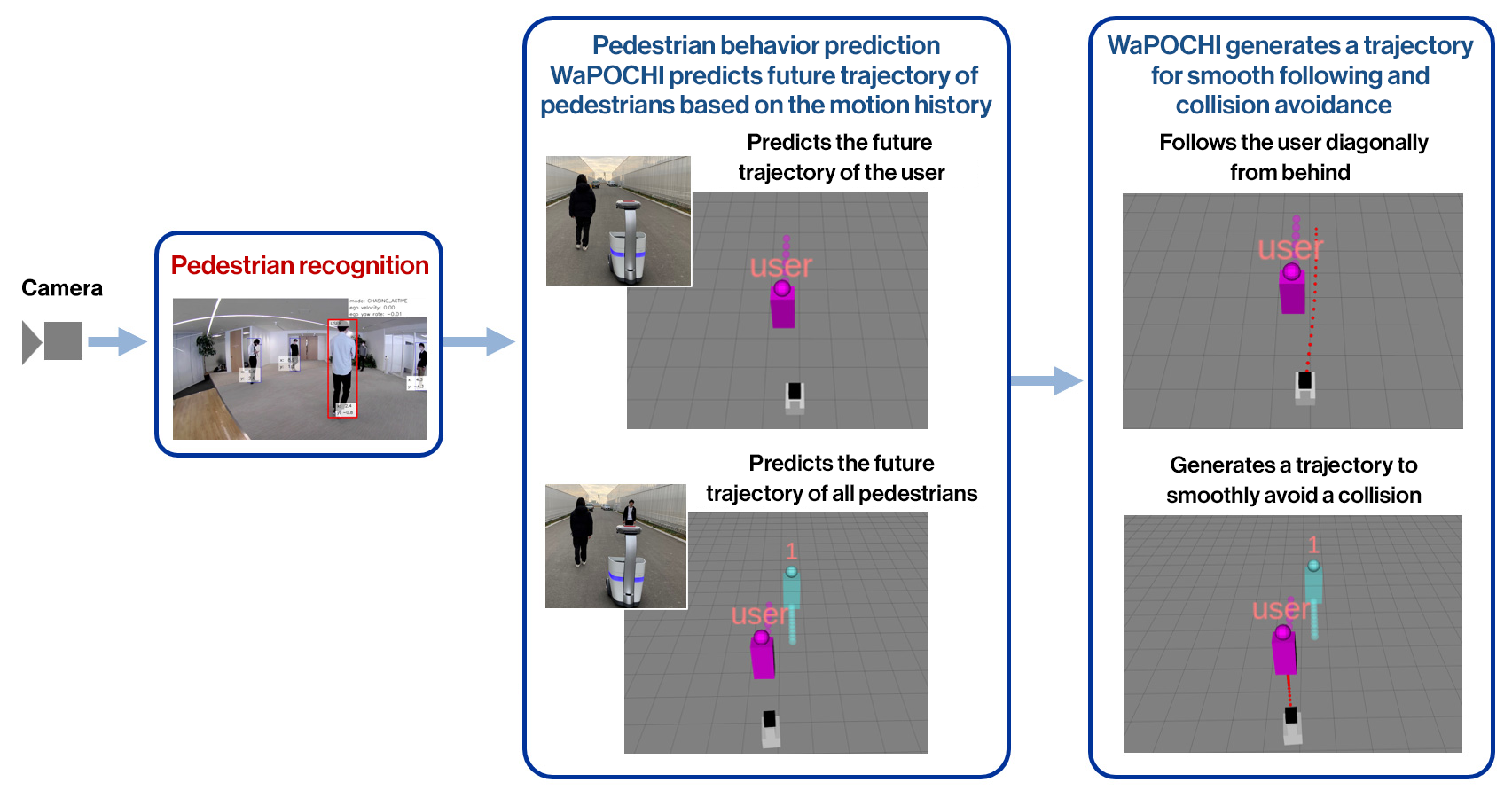
Following the user without losing tracking
WaPOCHI follows the user like a pet. It predicts the behavior of other pedestrians and generates a proper trajectory in consideration of the collision risk. Instead of making passive moves, WaPOCHI takes smooth evasive action to avoid a collision, just as people do, and continues to follow the user even in crowded places. WaPOCHI is designed to follow the user diagonally from behind so that it is easier for the user to maintain sight of WaPOCHI. For WaPOCHI to continue tracking the user in a crowded area, highly sophisticated pedestrian recognition and trajectory generation technologies are required.

WaPOCHI follows the user diagonally from behind and not directly behind, so that the user can easily be aware of WaPOCHI’s presence. 
WaPOCHI continues to recognize and follow the user even when other people with similar clothing, height and physique go past it.
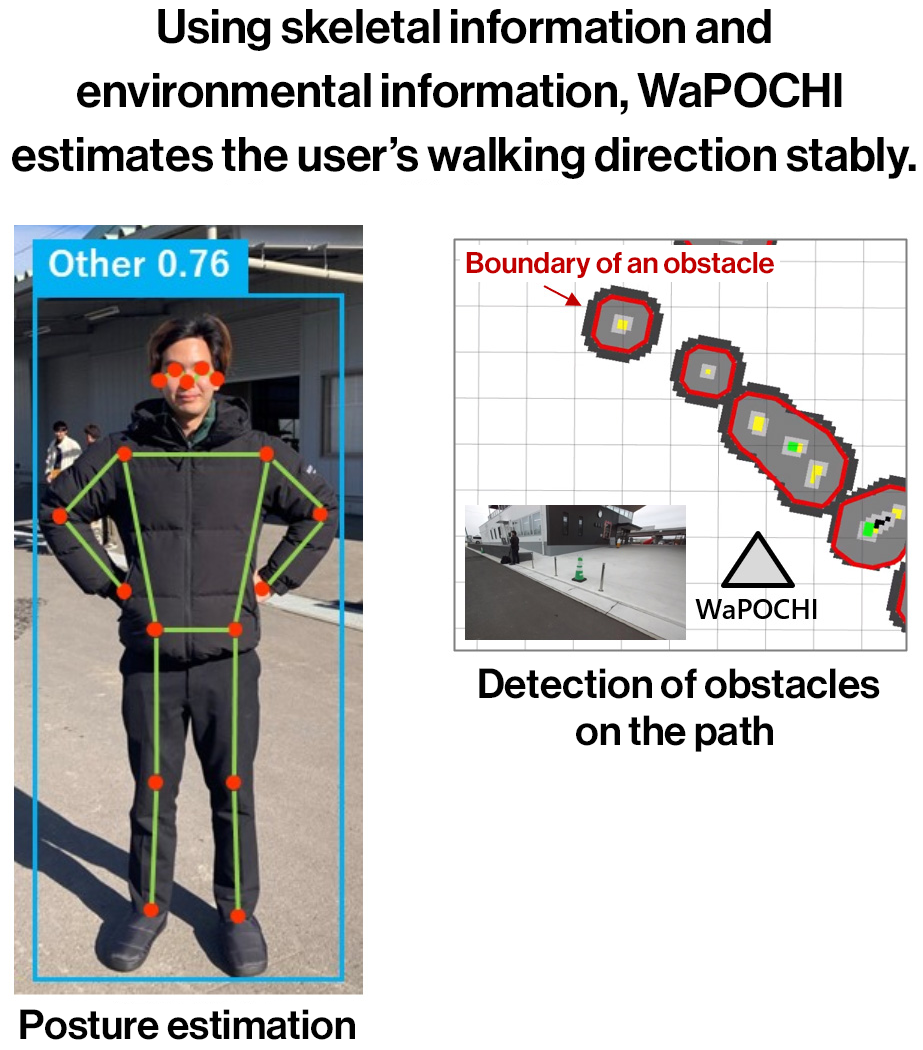
WaPOCHI leads the way while estimating the direction the user wants to go
WaPOCHI leads the way for the user, without presetting a destination, by estimating the user's destination online. The estimation is made based on the user's walking speed, walking direction and body direction. In addition, WaPOCHI utilizes analytical data of the typical patterns of pedestrian’s path selection based on the shape of the road, to make the estimation stable.
To make sure that the user can walk comfortably, WaPOCHI needs to not only avoid bumping into people, but also push its way through a crowd.
In less crowded areas, WaPOCHI leads the way diagonally in front of the user. In crowded areas where there is a possibility that the user cannot walk smoothly, WaPOCHI moves directly in front of the user to secure his/her walking space.
In addition, WaPOCHI generates a trajectory that makes its presence known and prompts pedestrians who are likely to enter the user’s walking space to take cooperative actions by assuming natural human behavior to avoid collisions to a certain degree.
Furthermore, WaPOCHI uses flashing light and warning sound to draw attention of people who are likely to enter the path at a brisk walking pace, including those who are walking while looking at their smartphone.
Nevertheless, WaPOCHI is designed to lead the way in the most appropriate manner while being in harmony with the surrounding environment without forcing any major changes to the movement of people in the vicinity, such as making an unnecessary effort to move a pedestrian who is standing still.

During normal operation, WaPOCHI leads the way diagonally in front of the user to make it easier for the user to see ahead. 
When leading the way through a crowd, WaPOCHI positions itself directly in front of the user to secure user’s walking space. 
When other pedestrians are likely to enter the user’s walking space, WaPOCHI prompts them to take cooperative actions.
Technology for user intention understanding and communication
Operation by human voice and gestures
WaPOCHI currently understands the user's voice input such as “follow me,” “go ahead” and "wait for me,” and starts following, leading the way, and standing by accordingly.
As for communication based on human gestures, WaPOCHI currently has a feature to stop leading mode when the user makes a stop gesture. Honda will also develop a feature to determine the destination based on the understanding of the user’s pointing gestures.


【Video】Demonstration testing of WaPOCHI
We have changed the testing venue from research facilities to a real-world environment, such as an area shared with pedestrians and bicycle riders, and begun technology demonstration testing of WaPOCHI to provide walking support by following/leading the user.
We could achieve this innovation not because we are AI experts but because we are researchers who have been making cars and other mobility devices.
We are researchers involved in automobile development and not just in AI. While AI researchers try to solve problems by thoroughly concentrating on enhancing their AI, we do not particularly follow that approach. We have a wide variety of experience in development that can be leveraged to realize the solutions we are aiming for. Also we have the know-how in control technology that we can apply.
Actually, we are incorporating our know-how in control theory, such as optimal control, robust control and adaptive control, which have been the strengths Honda in the area of powertrain and vehicle body control to increase the precision of automated driving performed by Honda CI Micro-mobility machines. By taking such an approach which is unique to Honda, we were able to create innovative technologies, including an automated driving system which does not rely on maps.
Another approach unique to Honda is that researchers are also serving as test drivers using actual vehicles. When you separate the researchers from those who test, there is no feedback from the real field, real products and reality, so all you can do is look at vast amounts of data.
By actually riding on the prototype, the researchers who were familiar with the issues were able to recognize with all five senses what problems it had, what shortcomings it had, and what was happening that was different from what they had assumed on their desks, and came up with ideas for solving the issues.
The CiKoMa and WaPOCHI research is now in the phase of conducting a series of proof-of-concept tests. We will utilize the knowledge we gain from the proof-of-concept testing and further advance Honda CI Micro-mobility technology. By using our technologies to help people, we are hoping to contribute to the creation of a vibrant and lively society in the future where everyone can enjoy the freedom of mobility with a complete peace of mind.
-

Yuji Yasui
Executive Chief Engineer, Computer Science
Innovative Research Excellence
Honda R&D Co., Ltd.
